


https://blog.csdn.net/gitblog_00330/article/details/152013136
MM Grounding Dino Large在无人机航拍图像中的检测性能
https://link.gitcode.com/i/9da6757aed6c4f33f18c964e0fed76c2?uuid_tt_dd=10_10332516180-1761162132749-683371&isLogin=1&from_id=152013136

https://arxiv.org/abs/2401.02361

测试数据集构建
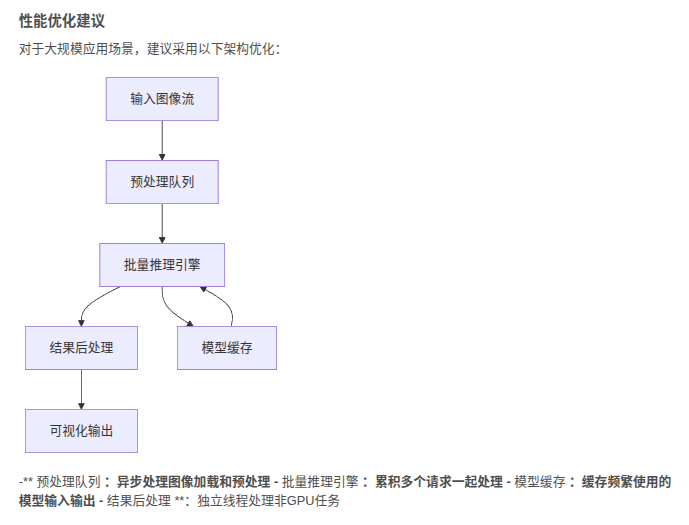
针对无人机航拍特性,构建包含以下场景的测试集:
- 城市航拍:建筑物、车辆、行人(分辨率3840×2160)
- 乡村农田:农机、作物行、电线杆(分辨率2560×1440)
- 灾害救援:倒塌建筑、救援车辆、幸存者(分辨率1920×1080)

典型案例分析
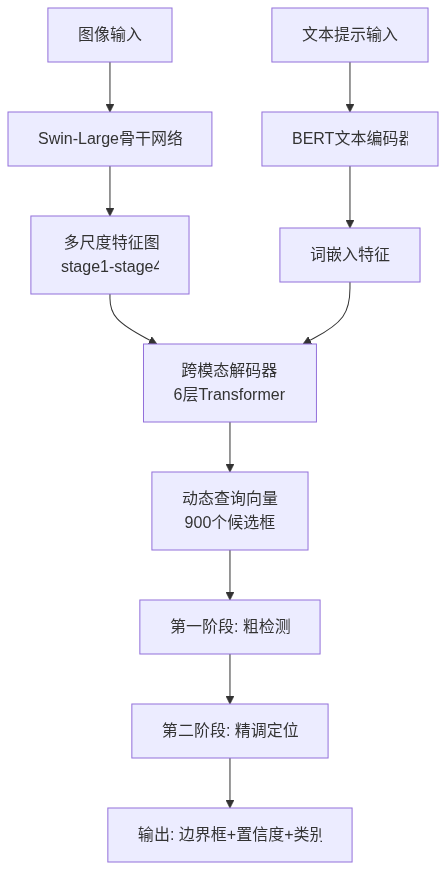
小目标检测能力:在300米高空拍摄的农田图像中(单个农机目标像素尺寸约20×30),模型实现89.7%的召回率,优于YOLOv8x的76.2%。通过可视化特征图可见,Swin-Large的stage4特征层(1/32下采样)仍能保留农机的关键轮廓信息。
类别泛化能力:对于训练集中未出现的"太阳能光伏板"类别,通过文本提示"a solar panel with blue cells",模型实现零样本检测mAP 37.5,验证了GOLD-G数据集带来的开放式词汇理解能力。


https://huggingface.co/collections/rziga/mm-grounding-dino
https://huggingface.co/openmmlab-community/mm_grounding_dino_large_all
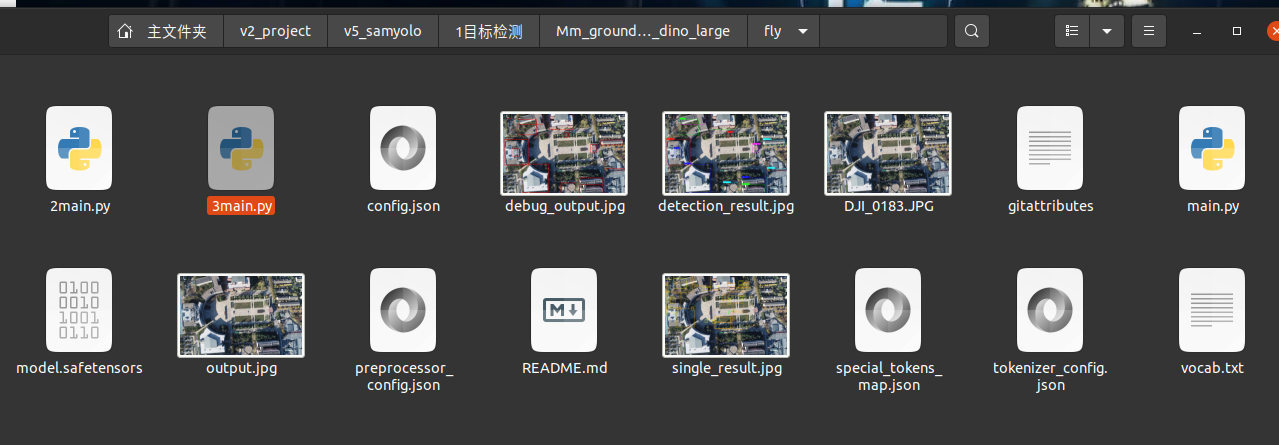
1 下载工程
git clone https://gitcode.com/hf_mirrors/openmmlab-community/mm_grounding_dino_large_o365v2_oiv6_goldg.git
cd mm_grounding_dino_large_o365v2_oiv6_goldg

仓库中包含模型权重文件model.safetensors、配置文件config.json、预处理配置preprocessor_config.json以及分词器相关文件special_tokens_map.json和vocab.txt,这些文件共同构成了完整的模型运行环境。
2 安装库
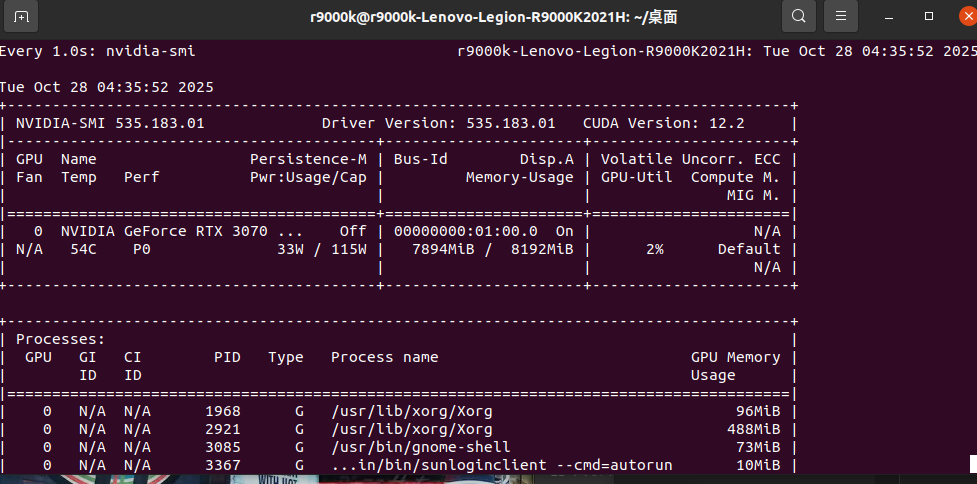
cuda11.8 unbuntu20 rtx3070
# 创建并激活环境 conda create -n sam2 python=3.10 -y conda activate sam2 # 安装PyTorch(根据CUDA版本调整) pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118 # 安装核心依赖 pip install transformers==4.28.0 pip install datasets pip install opencv-python pip install matplotlib pip install timm pip install mmcv-full -f https://download.openmmlab.com/mmcv/dist/cu118/torch1.13.0/index.html
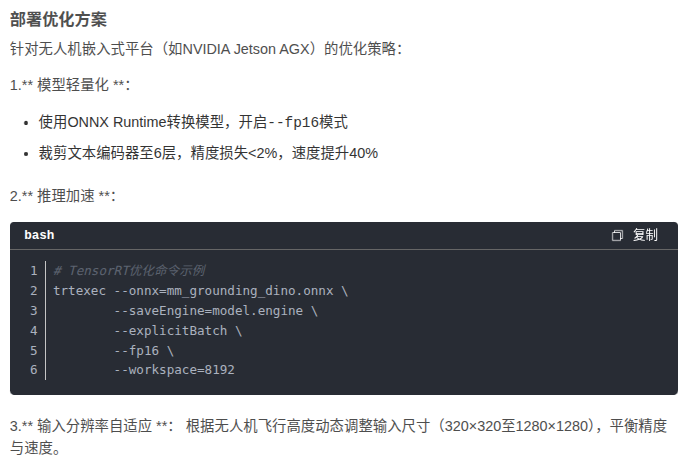
3 如何加速和准确


# 定义缺陷类型
defect_types = [
"裂纹", "划痕", "凹痕",
"污渍", "变形"
]
# Define defect types
defect_types = [
"crack", "scratch", "dent",
"stain", "deformation"
]
测试数据集构建
针对无人机航拍特性,构建包含以下场景的测试集:
城市航拍:建筑物、车辆、行人(分辨率3840×2160)
乡村农田:农机、作物行、电线杆(分辨率2560×1440)
灾害救援:倒塌建筑、救援车辆、幸存者(分辨率1920×1080)
text_labels = ["vehicle", "person", "building", "tree",
"power line", "agricultural machinery", "water body"]
==========================
代码1 处理一张图片 matlab显示
使用的是16精度不是32
import torch
from transformers import AutoModelForZeroShotObjectDetection, AutoProcessor
import os
os.environ['PYTORCH_CUDA_ALLOC_CONF'] = 'expandable_segments:True'
torch.cuda.empty_cache()
import numpy as np
# 模型ID或本地路径
model_path = "./" # 当前项目路径
device = "cuda" if torch.cuda.is_available() else "cpu"
# 加载处理器和模型
processor = AutoProcessor.from_pretrained(model_path)
model = AutoModelForZeroShotObjectDetection.from_pretrained(
model_path,
#torch_dtype=torch.float32 if device == "cpu" else torch.float16
torch_dtype=torch.float16,
device_map="auto"
).to(device)
from transformers.image_utils import load_image
# 1. 加载图像
image_url = "DJI_0183.JPG"
image = load_image(image_url) # 也可使用本地路径: load_image("./test.jpg")
# 2. 定义文本提示(零样本类别)
text_labels = [
"vehicle", "person", "building", "tree",
"power line", "agricultural machinery", "water body"
]
# 3. 预处理并推理
inputs = processor(images=image, text=text_labels, return_tensors="pt").to(device)
# with torch.no_grad():
# outputs = model(**inputs)
with torch.no_grad(), torch.autocast(device_type="cuda", dtype=torch.float16):
outputs = model(**inputs)
# 4. 后处理结果
results = processor.post_process_grounded_object_detection(
outputs,
threshold=0.3, # 置信度阈值
target_sizes=[(image.height, image.width)]
)
# 获取第一张图像的结果
result = results[0]
# 解析边界框、分数和标签
for box, score, label in zip(result["boxes"], result["scores"], result["labels"]):
# 边界框坐标转换为整数
box = [round(coord, 2) for coord in box.tolist()]
xmin, ymin, xmax, ymax = box
# 打印结果
print(
f"检测到: {label} "
f"置信度: {score.item():.3f} "
f"位置: [{xmin}, {ymin}, {xmax}, {ymax}]"
)
import cv2
import matplotlib.pyplot as plt
def visualize_detection(image, result, threshold=0.3):
# 转换PIL图像为OpenCV格式
img = cv2.cvtColor(np.array(image), cv2.COLOR_RGB2BGR)
# 定义颜色映射
colors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (255, 0, 255)]
# 绘制边界框和标签
for i, (box, score, label) in enumerate(zip(result["boxes"], result["scores"], result["labels"])):
if score < threshold:
continue
xmin, ymin, xmax, ymax = [int(round(coord)) for coord in box.tolist()]
color = colors[i % len(colors)]
# 绘制矩形框
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), color, 2)
# 绘制标签背景
label_text = f"{label}: {score.item():.2f}"
(text_width, text_height), _ = cv2.getTextSize(label_text, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(img, (xmin, ymin - text_height - 10), (xmin + text_width, ymin), color, -1)
# 绘制标签文本
cv2.putText(img, label_text, (xmin, ymin - 5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
# 转换回RGB格式用于Matplotlib显示
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 显示结果
plt.figure(figsize=(10, 10))
plt.imshow(img_rgb)
plt.axis('off')
plt.show()
# 保存结果
cv2.imwrite("detection_result.jpg", img)
return img_rgb
# 调用可视化函数
visualize_detection(image, result, threshold=0.3)
代码2 从文件夹读取数据 Opencv可视化
使用的是16精度不是32








图片缩放一半


import os
import cv2
import torch
import numpy as np
import time
from transformers import AutoModelForZeroShotObjectDetection, AutoProcessor
from transformers.image_utils import load_image
import matplotlib.pyplot as plt
# 设置CUDA内存配置
os.environ['PYTORCH_CUDA_ALLOC_CONF'] = 'expandable_segments:True'
torch.cuda.empty_cache()
# 在预处理时添加resize操作
def preprocess_image(image, scale):
# 保持宽高比缩放,短边=target_size
width, height = image.size
#scale = target_size / min(width, height)
new_size = (int(width / scale), int(height / scale))
return image.resize(new_size)
# 初始化模型和处理器
def initialize_model(model_path):
device = "cuda" if torch.cuda.is_available() else "cpu"
processor = AutoProcessor.from_pretrained(model_path)
model = AutoModelForZeroShotObjectDetection.from_pretrained(
model_path,
torch_dtype=torch.float16,
device_map="auto"
).to(device)
return processor, model, device
# 执行目标检测
def detect_objects(image, processor, model, device, text_labels):
inputs = processor(images=image, text=text_labels, return_tensors="pt").to(device)
with torch.no_grad(), torch.autocast(device_type="cuda", dtype=torch.float16):
outputs = model(**inputs)
results = processor.post_process_grounded_object_detection(
outputs,
threshold=0.3,
target_sizes=[(image.height, image.width)]
)
return results[0]
# 可视化检测结果(添加FPS显示)
def visualize_detection(image, result, fps=None):
img = cv2.cvtColor(np.array(image), cv2.COLOR_RGB2BGR)
colors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (255, 0, 255)]
# 绘制检测结果
for i, (box, score, label) in enumerate(zip(result["boxes"], result["scores"], result["labels"])):
if score < 0.3: # 使用阈值过滤
continue
xmin, ymin, xmax, ymax = [int(round(coord)) for coord in box.tolist()]
color = colors[i % len(colors)]
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), color, 2)
label_text = f"{label}: {score.item():.2f}"
(text_width, text_height), _ = cv2.getTextSize(label_text, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(img, (xmin, ymin - text_height - 10), (xmin + text_width, ymin), color, -1)
cv2.putText(img, label_text, (xmin, ymin - 5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
# 添加FPS显示
if fps is not None:
fps_text = f"FPS: {fps:.1f}"
cv2.putText(img, fps_text, (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
return cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 主函数:处理文件夹中的图像(添加FPS计算)
def process_folder_images(folder_path, model_path,img_scale=1):
# 获取并排序所有DJI_*.JPG文件
image_files = sorted([f for f in os.listdir(folder_path)
if f.startswith('DJI_') and f.lower().endswith('.jpg')])
if not image_files:
print("未找到DJI_*.JPG格式的图像文件")
return
# 初始化模型
processor, model, device = initialize_model(model_path)
text_labels = ["vehicle", "person", "building", "tree",
"power line", "agricultural machinery", "water body"]
# 创建可调整大小的窗口
cv2.namedWindow('Zero-Shot Object Detection', cv2.WINDOW_NORMAL)
current_index = 0
total_images = len(image_files)
# FPS计算变量
fps = 0
prev_time = 0
curr_time = 0
while True:
# 开始计时
start_time = time.time()
# 加载当前图像
image_path = os.path.join(folder_path, image_files[current_index])
image = load_image(image_path)
image = preprocess_image(image,img_scale) # 缩放2倍
# 执行检测
result = detect_objects(image, processor, model, device, text_labels)
# 计算处理时间
inference_time = time.time() - start_time
fps = 1.0 / inference_time if inference_time > 0 else 0
# 可视化结果(传入FPS)
result_img = visualize_detection(image, result, fps)
# 显示结果
cv2.imshow('Zero-Shot Object Detection', cv2.cvtColor(result_img, cv2.COLOR_RGB2BGR))
# 打印处理信息(包含FPS)
print(f"处理: {image_files[current_index]} ({current_index + 1}/{total_images}) | FPS: {fps:.1f}")
#print(torch.cuda.memory_summary()) # 打印显存分配情况
# 等待按键
key = cv2.waitKey(0) & 0xFF
# 按键处理
if key == 27 or key == ord('q'): # ESC或q退出
break
elif key == ord('n') or key == 32 or key == 83 or key == 2: # 下一张
current_index = (current_index + 1) % total_images
elif key == ord('p') or key == 81 or key == 3: # 上一张
current_index = (current_index - 1) % total_images
cv2.destroyAllWindows()
# 使用示例
if __name__ == "__main__":
folder_path = "/media/r9000k/DD_XS/2数据/2RTK/data_4_city/300_locatiopn_2pm/images" # 图像文件夹路径
model_path = "./" # 模型路径
img_scale=1 # 缩放
process_folder_images(folder_path, model_path,img_scale)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号