

https://github.com/HuajianUP/Photo-SLAM

0 安装依赖
sudo apt install libeigen3-dev libboost-all-dev libjsoncpp-dev libopengl-dev mesa-utils libglfw3-dev libglm-dev
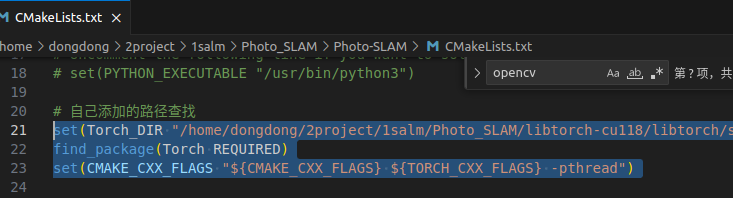
支持的 LibTorch 版本最高为 2.1.2。如果你没有在 CMake 的系统搜索路径中安装 LibTorch,则需要添加其他选项来build.sh帮助 CMake 找到 LibTorch。详情请参阅在build.sh之前添加一行:find_package(Torch REQUIRED)CMakeLists.txt
2选1安装,这里使用c++版本的。
[选项 1]
您可以下载 libtorch,例如cu118,然后将其解压到文件夹中./the_path_to_where_you_extracted_LibTorch。
# In a Terminal wget https://download.pytorch.org/libtorch/cu118/libtorch-cxx11-abi-shared-with-deps-2.0.1%2Bcu118.zip -O libtorch-cu118.zip unzip libtorch-cu118.zip -d ./the_path_to_where_you_extracted_LibTorch rm libtorch-cu118.zip
cmake设置路径
# In CMakeLists.txt set(Torch_DIR ./the_path_to_where_you_extracted_LibTorch/libtorch/share/cmake/Torch)
自己的
set(Torch_DIR "/home/dongdong/2project/1salm/Photo_SLAM/libtorch-cu118/libtorch/share/cmake/Torch")
[选项 2]Conda。
如果你使用 Conda 来管理你的 Python 包,并且安装了兼容的 Pytorch,你可以设置
# [For Jatson Orin] To install Pytorch in Jatson developer kit, you can run the below commands # export TORCH_INSTALL=https://developer.download.nvidia.com/compute/redist/jp/v511/pytorch/torch-2.0.0+nv23.05-cp38-cp38-linux_aarch64.whl # pip install --no-cache $TORCH_INSTALL
cmake设置路径
set(Torch_DIR /the_path_to_conda/python3.x/site-packages/torch/share/cmake/Torch)
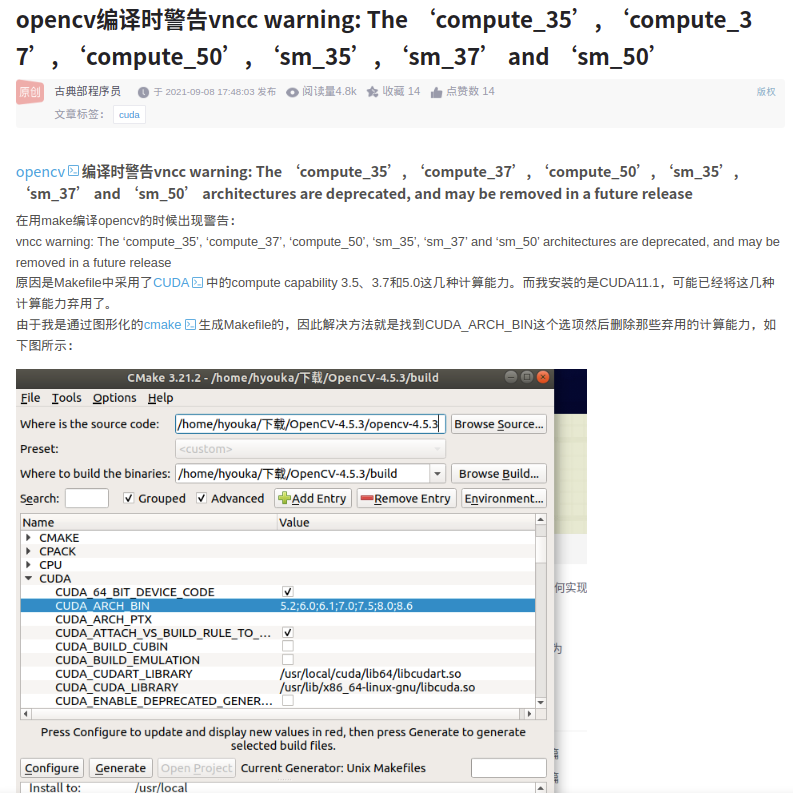
3 将 OpenCV 与 opencv_contrib 和 CUDA 结合使用
以 4.7.0 版本为例,查看OpenCV realeases和opencv_contrib,会找到OpenCV 4.7.0和对应的opencv_contrib 4.7.0,下载到同一目录(例如~/opencv)并解压,
https://github.com/opencv/opencv/archive/refs/tags/4.7.0.tar.gz
https://github.com/opencv/opencv_contrib/archive/refs/tags/4.7.0.tar.gz
注意修改安装路径
DCMAKE_INSTALL_PREFIX
修改扩展库路径
DOPENCV_EXTRA_MODULES_PATH
cmake -DCMAKE_BUILD_TYPE=RELEASE \ -DWITH_CUDA=ON \ -DWITH_CUDNN=ON \ -DOPENCV_DNN_CUDA=ON \ -DWITH_NVCUVID=ON \ -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-11.8 \ -DOPENCV_EXTRA_MODULES_PATH="/home/dongdong/2project/1salm/Photo_SLAM/opencv47/opencv_contrib-4.7.0/modules" \ -DCMAKE_INSTALL_PREFIX="/home/dongdong/2project/1salm/Photo_SLAM/opencv47/install_opencv47" \ -DBUILD_TIFF=ON \ -DBUILD_ZLIB=ON \ -DBUILD_JASPER=ON \ -DBUILD_CCALIB=ON \ -DBUILD_JPEG=ON \ -DWITH_FFMPEG=ON \ ..
编译
sudo make -j30
安装
sudo make install
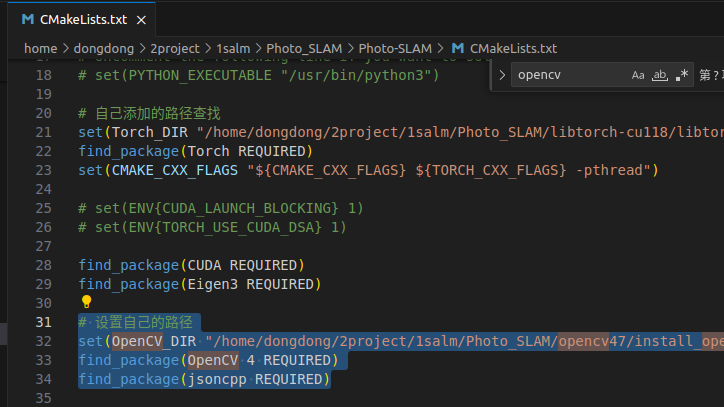
设置路径
set(OpenCV_DIR /your_preferred_path/lib/cmake/opencv4)
自己的路径# 设置自己的路径 set(OpenCV_DIR "/home/dongdong/2project/1salm/Photo_SLAM/opencv47/install_opencv47/lib/cmake/opencv4")
修改1
修改2

报错问题1 忽略不管
安装工程Photo-SLAM
git clone https://github.com/HuajianUP/Photo-SLAM.git cd Photo-SLAM/ chmod +x ./build.sh ./build.sh
编译过程 脚本自动执行,也可以跟着脚本手动执行,看看 哪一步除了问题。
先编译orb slam3的库和工程
然后编译photo工程
编译成功
如果需要删除某个文件夹
sudo rm -r build
测试脚本
执行权限
sudo chmod +x ./*.sh
../bin/tum_mono \
../ORB-SLAM3/Vocabulary/ORBvoc.txt \
../cfg/ORB_SLAM3/Monocular/TUM/tum_freiburg1_desk.yaml \ 相机内参 需要改
../cfg/gaussian_mapper/Monocular/TUM/tum_mono.yaml \ 高斯训练参数 不用改
/home/rapidlab/dataset/VSLAM/TUM/rgbd_dataset_freiburg1_desk \ 数据地址
../results/tum_mono_$i/rgbd_dataset_freiburg1_desk \ 结果保存位置
no_viewer 是否可视化
自己改造的文件
/**
* This file is part of Photo-SLAM
*
* Copyright (C) 2023-2024 Longwei Li and Hui Cheng, Sun Yat-sen University.
* Copyright (C) 2023-2024 Huajian Huang and Sai-Kit Yeung, Hong Kong University of Science and Technology.
*
* Photo-SLAM is free software: you can redistribute it and/or modify it under the terms of the GNU General Public
* License as published by the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* Photo-SLAM is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even
* the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along with Photo-SLAM.
* If not, see <http://www.gnu.org/licenses/>.
*/
#include <torch/torch.h>
#include <iostream>
#include <algorithm>
#include <fstream>
#include <chrono>
#include <ctime>
#include <sstream>
#include <thread>
#include <filesystem>
#include <memory>
#include <opencv2/core/core.hpp>
#include "ORB-SLAM3/include/System.h"
#include "include/gaussian_mapper.h"
#include "viewer/imgui_viewer.h"
void LoadImages(const std::string &strFile, std::vector<std::string> &vstrImageFilenames,
std::vector<double> &vTimestamps);
void LoadImages_DJI(const std::string &strFile, std::vector<std::string> &vstrImageFilenames,
std::vector<double> &vTimestamps);
void saveTrackingTime(std::vector<float> &vTimesTrack, const std::string &strSavePath);
void saveGpuPeakMemoryUsage(std::filesystem::path pathSave);
int main(int argc, char **argv)
{
if (argc != 6 && argc != 7)
{
std::cerr << std::endl
<< "Usage: " << argv[0]
<< " path_to_vocabulary" /*1*/
<< " path_to_ORB_SLAM3_settings" /*2*/
<< " path_to_gaussian_mapping_settings" /*3*/
<< " path_to_sequence" /*4*/
<< " path_to_trajectory_output_directory/" /*5*/
<< " (optional)no_viewer" /*6*/
<< std::endl;
return 1;
}
bool use_viewer = true;
if (argc == 7)
use_viewer = (std::string(argv[6]) == "no_viewer" ? false : true);
std::string output_directory = std::string(argv[5]);
if (output_directory.back() != '/')
output_directory += "/";
std::filesystem::path output_dir(output_directory);
// Retrieve paths to images
std::vector<std::string> vstrImageFilenamesRGB;
std::vector<double> vTimestamps;
//std::string strFile = std::string(argv[4]) + "/rgb.txt";
std::string strFile = std::string(argv[4])+"/slam_config/gnss.txt";
std::cout << "strFile: " << strFile << std::endl;
LoadImages_DJI(strFile, vstrImageFilenamesRGB, vTimestamps);
// Check consistency in the number of images and depthmaps
int nImages = vstrImageFilenamesRGB.size();
if (vstrImageFilenamesRGB.empty())
{
std::cerr << std::endl << "No images found in provided path." << std::endl;
return 1;
}
// Device
torch::DeviceType device_type;
if (torch::cuda::is_available())
{
std::cout << "CUDA available! Training on GPU." << std::endl;
device_type = torch::kCUDA;
}
else
{
std::cout << "Training on CPU." << std::endl;
device_type = torch::kCPU;
}
// Create SLAM system. It initializes all system threads and gets ready to process frames.
std::shared_ptr<ORB_SLAM3::System> pSLAM =
std::make_shared<ORB_SLAM3::System>(
argv[1], argv[2], ORB_SLAM3::System::MONOCULAR);
float imageScale = pSLAM->GetImageScale();
// Create GaussianMapper
std::filesystem::path gaussian_cfg_path(argv[3]);
std::shared_ptr<GaussianMapper> pGausMapper =
std::make_shared<GaussianMapper>(
pSLAM, gaussian_cfg_path, output_dir, 0, device_type);
std::thread training_thd(&GaussianMapper::run, pGausMapper.get());
// Create Gaussian Viewer
std::thread viewer_thd;
std::shared_ptr<ImGuiViewer> pViewer;
if (use_viewer)
{
pViewer = std::make_shared<ImGuiViewer>(pSLAM, pGausMapper);
viewer_thd = std::thread(&ImGuiViewer::run, pViewer.get());
}
// Vector for tracking time statistics
std::vector<float> vTimesTrack;
vTimesTrack.resize(nImages);
std::cout << std::endl << "-------" << std::endl;
std::cout << "Start processing sequence ..." << std::endl;
std::cout << "Images in the sequence: " << nImages << std::endl << std::endl;
// Main loop
cv::Mat im;
for (int ni = 0; ni < nImages; ni++)
{
if (pSLAM->isShutDown())
break;
// Read image and depthmap from file
std::string image_name = std::string(argv[4]) + "/images/" + vstrImageFilenamesRGB[ni];
std::cout<<"image_name "<< image_name << std::endl;
if (std::filesystem::exists(image_name)) {
std::cout << "文件存在!\n";
} else {
std::cout << "文件不存在!\n";
continue;
}
im = cv::imread(image_name, cv::IMREAD_UNCHANGED); //,cv::IMREAD_UNCHANGED);
cv::cvtColor(im, im, CV_BGR2RGB);
double tframe = vTimestamps[ni];
if (im.empty())
{
std::cerr << std::endl << "Failed to load image at: "
<< std::string(argv[4]) << "/" << vstrImageFilenamesRGB[ni] << std::endl;
return 1;
}
if (imageScale != 1.f)
{
int width = im.cols * imageScale;
int height = im.rows * imageScale;
cv::resize(im, im, cv::Size(width, height));
}
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
// Pass the image to the SLAM system
pSLAM->TrackMonocular(im, tframe, std::vector<ORB_SLAM3::IMU::Point>(), vstrImageFilenamesRGB[ni]);
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
double ttrack = std::chrono::duration_cast<std::chrono::duration<double>>(t2 - t1).count();
vTimesTrack[ni] = ttrack;
// Wait to load the next frame
double T = 0;
if (ni < nImages - 1)
T = vTimestamps[ni + 1] - tframe;
else if (ni > 0)
T = tframe - vTimestamps[ni - 1];
if (ttrack < T)
usleep((T - ttrack) * 1e6);
}
// Stop all threads
pSLAM->Shutdown();
training_thd.join();
if (use_viewer)
viewer_thd.join();
// GPU peak usage
saveGpuPeakMemoryUsage(output_dir / "GpuPeakUsageMB.txt");
// Tracking time statistics
saveTrackingTime(vTimesTrack, (output_dir / "TrackingTime.txt").string());
// Save camera trajectory
pSLAM->SaveTrajectoryTUM((output_dir / "CameraTrajectory_TUM.txt").string());
pSLAM->SaveKeyFrameTrajectoryTUM((output_dir / "KeyFrameTrajectory_TUM.txt").string());
pSLAM->SaveTrajectoryEuRoC((output_dir / "CameraTrajectory_EuRoC.txt").string());
pSLAM->SaveKeyFrameTrajectoryEuRoC((output_dir / "KeyFrameTrajectory_EuRoC.txt").string());
// pSLAM->SaveTrajectoryKITTI((output_dir / "CameraTrajectory_KITTI.txt").string());
return 0;
}
double time_stamp = 0;
void LoadImages_DJI(const std::string &strFile, std::vector<std::string> &vstrImageFilenames,
std::vector<double> &vTimestamps)
{
std::ifstream file(strFile); // 打开txt文件
if (!file) {
std::cerr << "无法打开文件!" << std::endl;
}
std::string line;
while (std::getline(file, line)) { // 逐行读取文件
std::istringstream ss(line); // 使用 stringstream 解析每一行
std::string image_name;
vTimestamps.push_back(time_stamp);
time_stamp=time_stamp+2;// 秒一张
ss >> image_name; // 提取第一列图像名称
vstrImageFilenames.push_back(image_name);
std::cout<< "time_stamp " << time_stamp << " 名字 " << image_name << std::endl;
}
}
void LoadImages(const std::string &strFile, std::vector<std::string> &vstrImageFilenames,
std::vector<double> &vTimestamps)
{
ifstream f;
f.open(strFile.c_str());
// skip first three lines
string s0;
std::getline(f,s0);
std::getline(f,s0);
std::getline(f,s0);
while(!f.eof())
{
std::string s;
std::getline(f,s);
if(!s.empty())
{
std::stringstream ss;
ss << s;
double t;
std::string sRGB;
ss >> t;
vTimestamps.push_back(t);
ss >> sRGB;
vstrImageFilenames.push_back(sRGB);
}
}
}
void saveTrackingTime(std::vector<float> &vTimesTrack, const std::string &strSavePath)
{
std::ofstream out;
out.open(strSavePath.c_str());
std::size_t nImages = vTimesTrack.size();
float totaltime = 0;
for (int ni = 0; ni < nImages; ni++)
{
out << std::fixed << std::setprecision(4)
<< vTimesTrack[ni] << std::endl;
totaltime += vTimesTrack[ni];
}
// std::sort(vTimesTrack.begin(), vTimesTrack.end());
// out << "-------" << std::endl;
// out << std::fixed << std::setprecision(4)
// << "median tracking time: " << vTimesTrack[nImages / 2] << std::endl;
// out << std::fixed << std::setprecision(4)
// << "mean tracking time: " << totaltime / nImages << std::endl;
out.close();
}
void saveGpuPeakMemoryUsage(std::filesystem::path pathSave)
{
namespace c10Alloc = c10::cuda::CUDACachingAllocator;
c10Alloc::DeviceStats mem_stats = c10Alloc::getDeviceStats(0);
c10Alloc::Stat reserved_bytes = mem_stats.reserved_bytes[static_cast<int>(c10Alloc::StatType::AGGREGATE)];
float max_reserved_MB = reserved_bytes.peak / (1024.0 * 1024.0);
c10Alloc::Stat alloc_bytes = mem_stats.allocated_bytes[static_cast<int>(c10Alloc::StatType::AGGREGATE)];
float max_alloc_MB = alloc_bytes.peak / (1024.0 * 1024.0);
std::ofstream out(pathSave);
out << "Peak reserved (MB): " << max_reserved_MB << std::endl;
out << "Peak allocated (MB): " << max_alloc_MB << std::endl;
out.close();
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号