

https://blog.csdn.net/weixin_43013761/article/details/124328735

1. 提取ORB特征点
#include <opencv2/opencv.hpp> #include <opencv2/features2d.hpp> #include <opencv2/core.hpp> cv::Ptr<cv::ORB> orb = cv::ORB::create(); std::vector<cv::KeyPoint> keypoints1, keypoints2; cv::Mat descriptors1, descriptors2; // 提取特征点 orb->detectAndCompute(image1, cv::noArray(), keypoints1, descriptors1); orb->detectAndCompute(image2, cv::noArray(), keypoints2, descriptors2);
2. 匹配特征点
cv::BFMatcher matcher(cv::NORM_HAMMING, true); std::vector<cv::DMatch> matches; matcher.match(descriptors1, descriptors2, matches);
3. 提取匹配的点
std::vector<cv::Point2f> points1, points2;
for (const auto& match : matches) {
points1.push_back(keypoints1[match.queryIdx].pt);
points2.push_back(keypoints2[match.trainIdx].pt);
}
4. 三角化
假设你有两个相机位姿 T1 和 T2,它们是4x4的变换矩阵。
cv::Mat T1 = ...; // 世界到相机1的变换矩阵
cv::Mat T2 = ...; // 世界到相机2的变换矩阵
std::vector<cv::Point3f> points3D;
for (size_t i = 0; i < points1.size(); i++) {
cv::Mat A(4, 4, CV_64F);
... A的具体
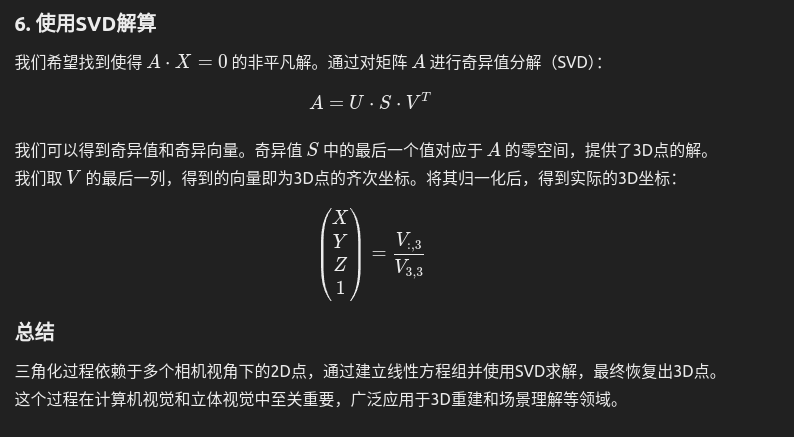
// 使用SVD分解
cv::Mat u, w, vt;
cv::SVD::compute(A, w, u, vt);
// 3D点
cv::Mat X = vt.row(3).t() / vt.row(3).at<double>(3);
points3D.emplace_back(X.at<double>(0), X.at<double>(1), X.at<double>(2));
}
opnevslam 对应
Vec3_t triangulator::triangulate(const cv::Point2d& pt_1, const cv::Point2d& pt_2, const Mat34_t& P_1, const Mat34_t& P_2) {
Mat44_t A;
A.row(0) = pt_1.x * P_1.row(2) - P_1.row(0);
A.row(1) = pt_1.y * P_1.row(2) - P_1.row(1);
A.row(2) = pt_2.x * P_2.row(2) - P_2.row(0);
A.row(3) = pt_2.y * P_2.row(2) - P_2.row(1);
const Eigen::JacobiSVD<Mat44_t> svd(A, Eigen::ComputeFullU | Eigen::ComputeFullV);
const Vec4_t v = svd.matrixV().col(3);
return v.block<3, 1>(0, 0) / v(3);
}
5. 输出3D点
for (const auto& point : points3D) {
std::cout << "3D Point: " << point << std::endl;
}



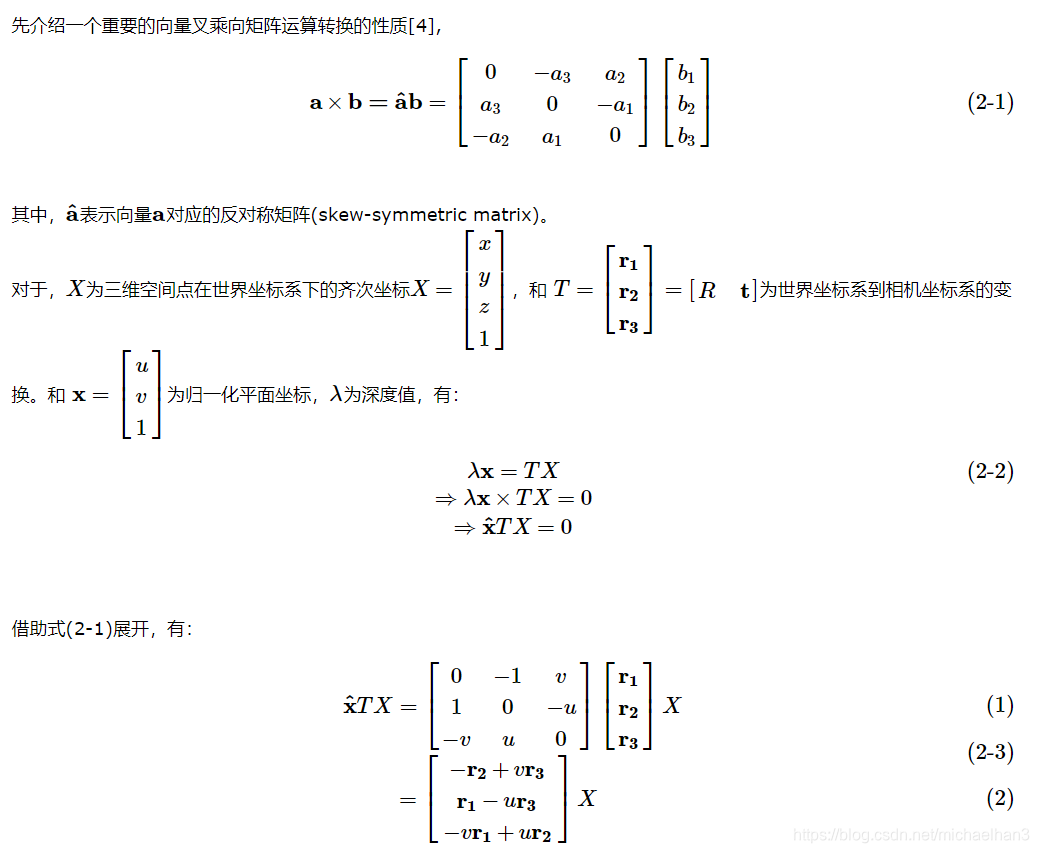
利用叉乘的性质
为什么要这么算?
1加快速度

2噪声干扰


https://blog.csdn.net/michaelhan3/article/details/89483148
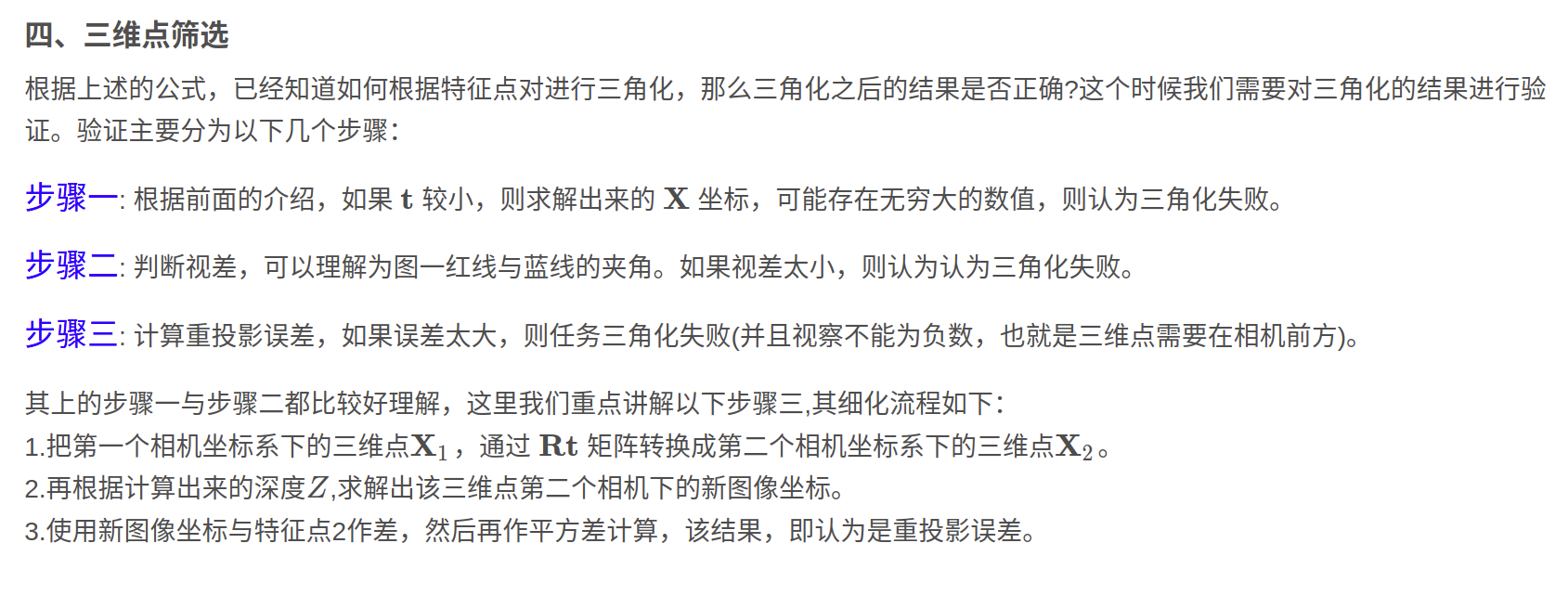
一 :三角化的提出
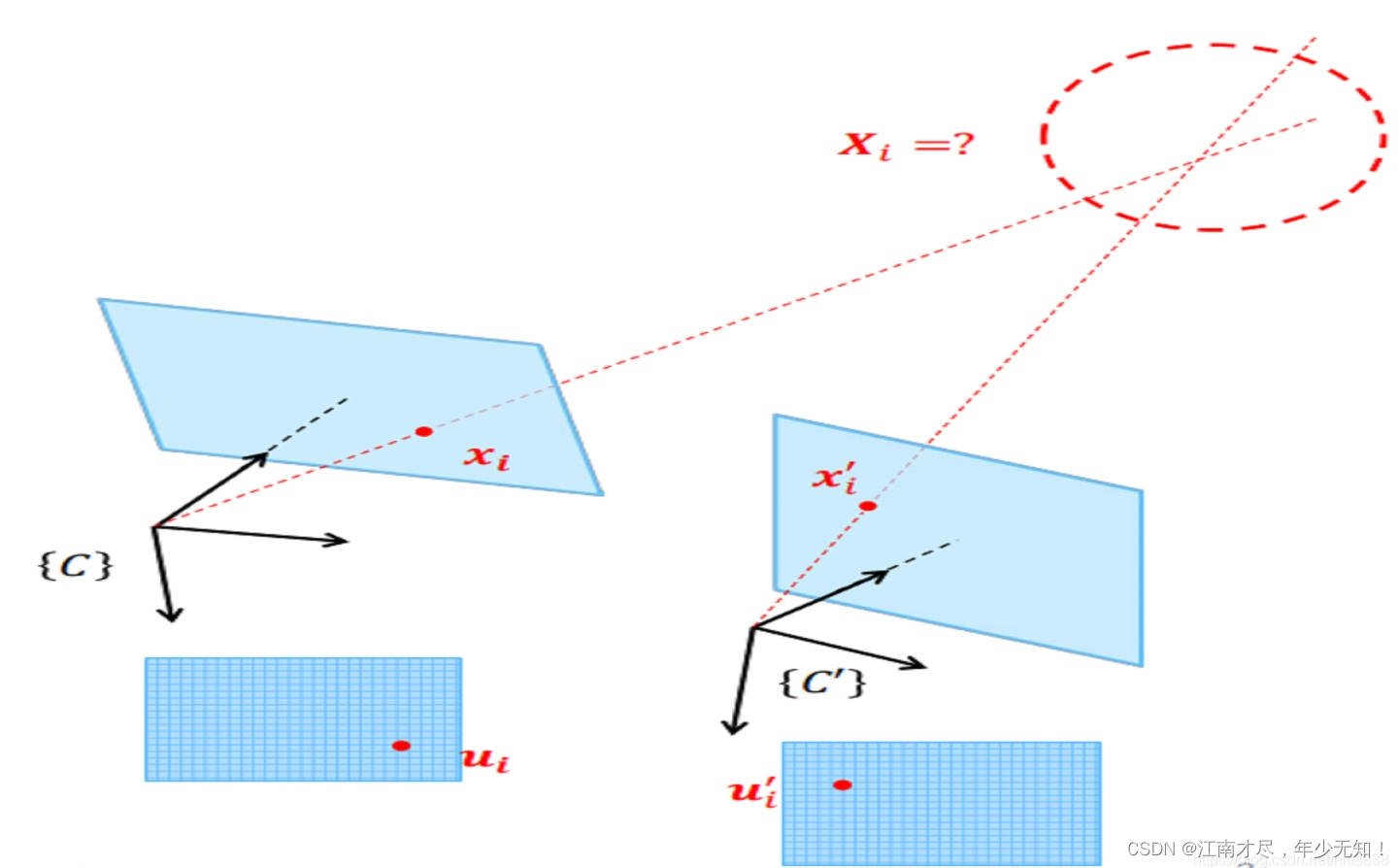
三角化最早由高斯提出,并应用于测量学中。简单来讲就是:在不同的位置观测同一个三维点P(x, y, z),已知在不同位置处观察到的三维点的二维投影点X1(x1, y1), X2(x2, y2),利用三角关系,恢复出三维点的深度信息z。
一 :三角化的提出
三角化最早由高斯提出,并应用于测量学中。简单来讲就是:在不同的位置观测同一个三维点P(x, y, z),已知在不同位置处观察到的三维点的二维投影点X1(x1, y1), X2(x2, y2),利用三角关系,恢复出三维点的深度信息z。
二: 三角化求解
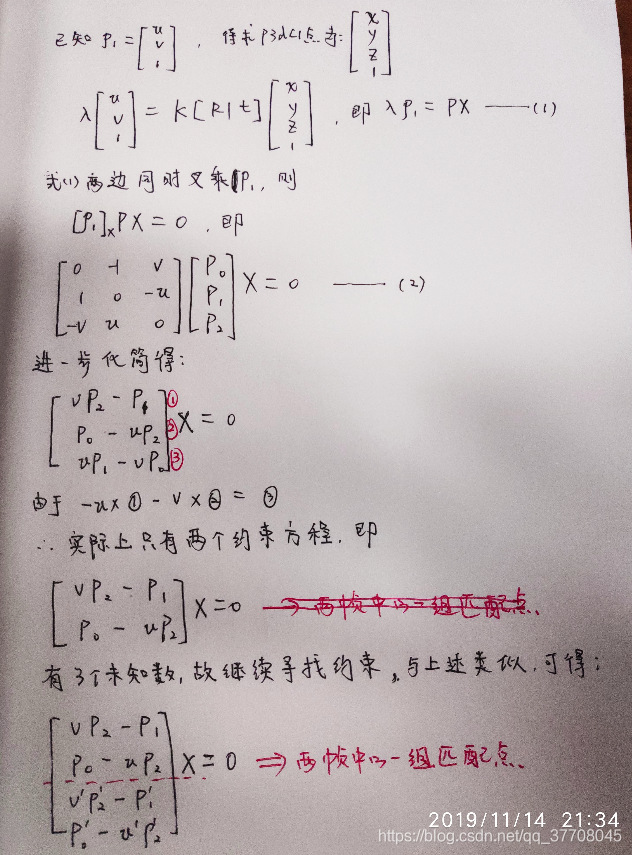
(1) 利用叉乘进行消元进行求解
s1x1 = s2Rx2 + t 公式(1)
左右两边同时乘以x1的反对称矩阵,可得:
s1x1^x1 = 0 = s2x1^Rx2 + x1^t 公式(2)
由上式可解得s2,
将s2代入公式(1),可求得s1
该方法也是视觉slam十四讲那本书里讲解三角化里提到的方法。
二: 三角化求解
(1) 利用叉乘进行消元进行求解
s1x1 = s2Rx2 + t 公式(1)
左右两边同时乘以x1的反对称矩阵,可得:
s1x1^x1 = 0 = s2x1^Rx2 + x1^t 公式(2)
由上式可解得s2,
将s2代入公式(1),可求得s1
该方法也是视觉slam十四讲那本书里讲解三角化里提到的方法。
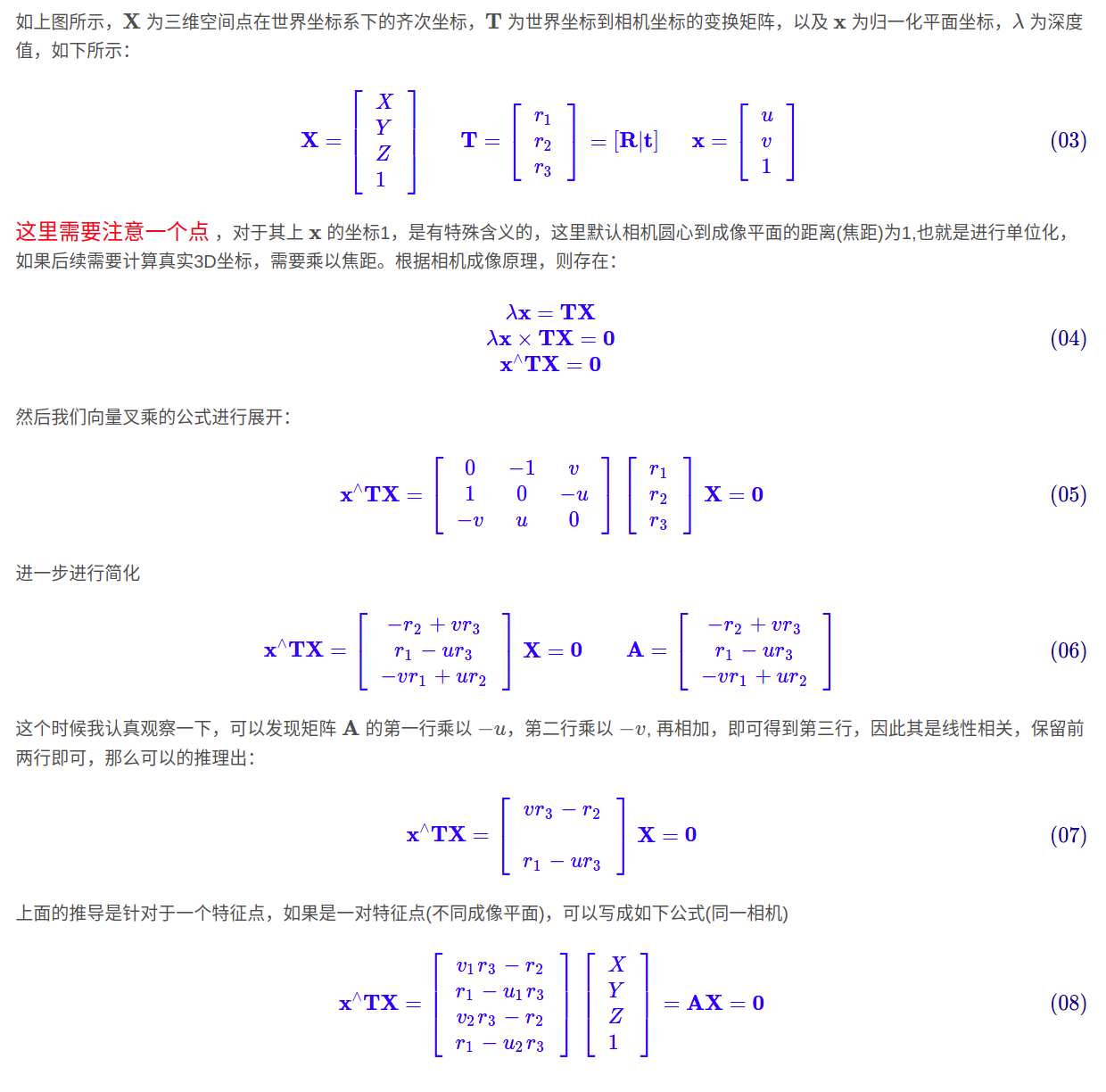
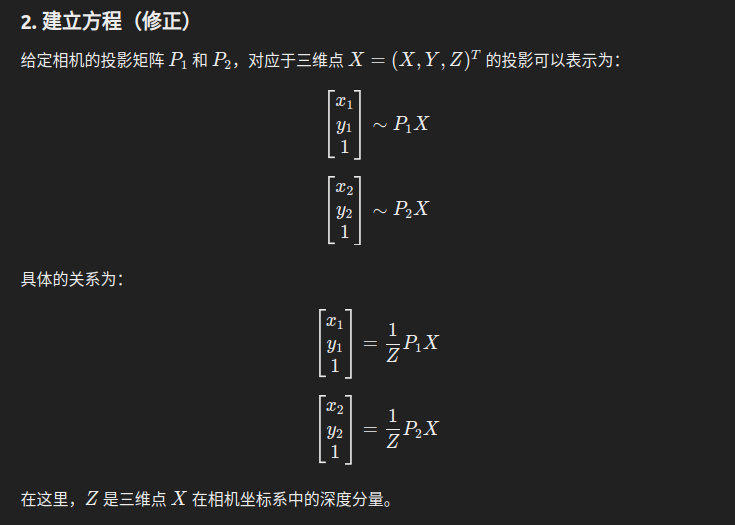
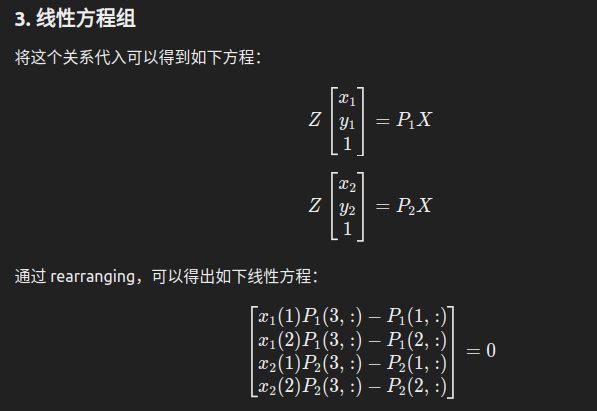
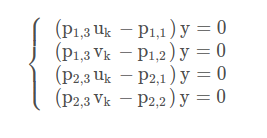
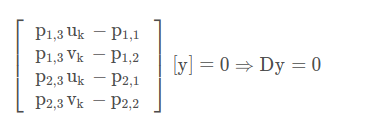
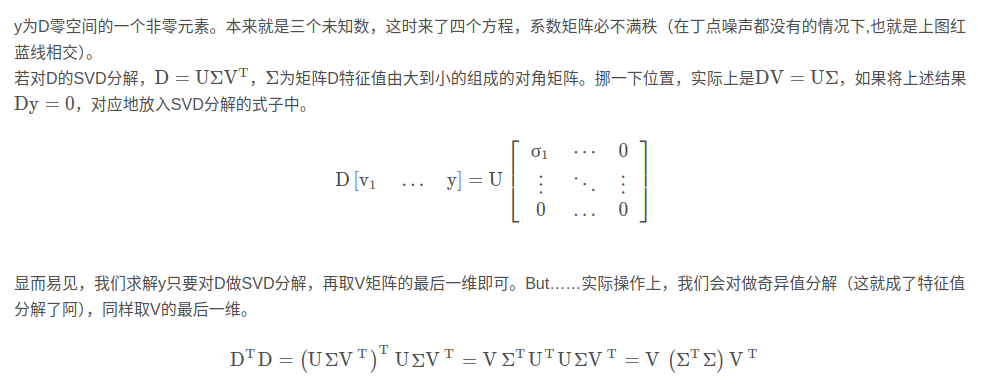
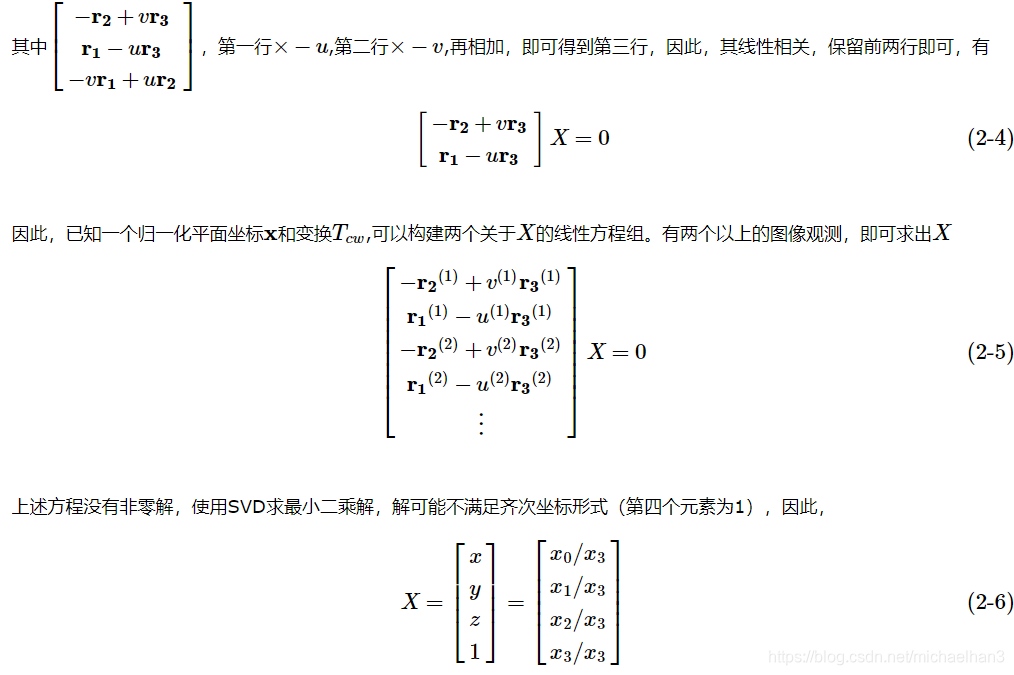
(2) 线性三角化法
openvslam代码
Vec3_t triangulator::triangulate(const cv::Point2d& pt_1, const cv::Point2d& pt_2, const Mat34_t& P_1, const Mat34_t& P_2)
{
//H矩阵
Mat44_t A;
//H矩阵每一行赋值
A.row(0) = pt_1.x * P_1.row(2) - P_1.row(0);//u1p1(3)-p1(1)
A.row(1) = pt_1.y * P_1.row(2) - P_1.row(1);//v1p1(3)-p1(2)
A.row(2) = pt_2.x * P_2.row(2) - P_2.row(0);//u2p2(3)-p2(1)
A.row(3) = pt_2.y * P_2.row(2) - P_2.row(1);//v2p2(3)-p2(2)
//SVD求解,齐次坐标X为H的最小奇异值的奇异向量
const Eigen::JacobiSVD<Mat44_t> svd(A, Eigen::ComputeFullU | Eigen::ComputeFullV);
//因为SVD解可能不满足齐次坐标形式(第四个元素为0),所以需要进行归一化处理
const Vec4_t v = svd.matrixV().col(3);
return v.block<3, 1>(0, 0) / v(3);//归一化 block:从下标(0,0)开始,取3*1区域
}
VINS-Mono中相关代码

void FeatureManager::triangulatePoint(Eigen::Matrix<double, 3, 4> &Pose0, Eigen::Matrix<double, 3, 4> &Pose1,
Eigen::Vector2d &point0, Eigen::Vector2d &point1, Eigen::Vector3d &point_3d)
{
Eigen::Matrix4d design_matrix = Eigen::Matrix4d::Zero();
design_matrix.row(0) = point0[0] * Pose0.row(2) - Pose0.row(0);
design_matrix.row(1) = point0[1] * Pose0.row(2) - Pose0.row(1);
design_matrix.row(2) = point1[0] * Pose1.row(2) - Pose1.row(0);
design_matrix.row(3) = point1[1] * Pose1.row(2) - Pose1.row(1);
Eigen::Vector4d triangulated_point;
triangulated_point =
design_matrix.jacobiSvd(Eigen::ComputeFullV).matrixV().rightCols<1>();
point_3d(0) = triangulated_point(0) / triangulated_point(3);
point_3d(1) = triangulated_point(1) / triangulated_point(3);
point_3d(2) = triangulated_point(2) / triangulated_point(3);
}
ORB-SLAM21中的三角形法的代码如下:
void Initializer::Triangulate(const cv::KeyPoint &kp1, const cv::KeyPoint &kp2, const cv::Mat &P1, const cv::Mat &P2, cv::Mat &x3D)
{
cv::Mat A(4,4,CV_32F);
A.row(0) = kp1.pt.x*P1.row(2)-P1.row(0);
A.row(1) = kp1.pt.y*P1.row(2)-P1.row(1);
A.row(2) = kp2.pt.x*P2.row(2)-P2.row(0);
A.row(3) = kp2.pt.y*P2.row(2)-P2.row(1);
cv::Mat u,w,vt;
cv::SVD::compute(A,w,u,vt,cv::SVD::MODIFY_A| cv::SVD::FULL_UV);
x3D = vt.row(3).t();
x3D = x3D.rowRange(0,3)/x3D.at<float>(3);
}
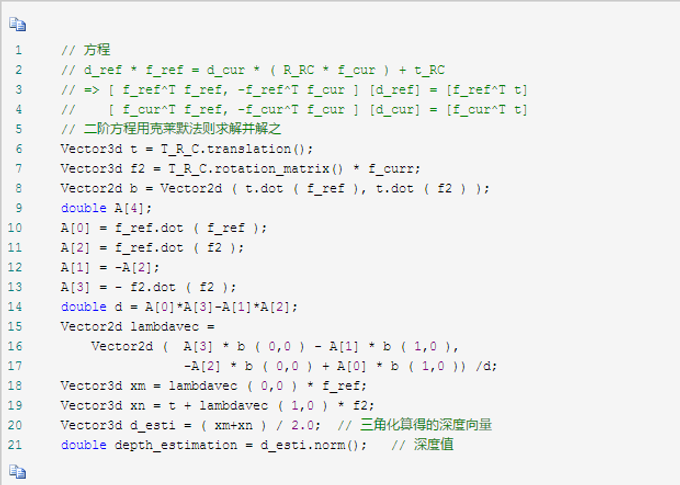
(3) 解二元一次方程
视觉slam十四讲单目重建深度滤波部分代码。利用Cramer's法则,
按照对极几何中的定义,设x1, x2为两个特征点的归一化坐标,则它们满足:
s1x1 = s2Rx2 + t 公式(1)
=> s1x1 - s2Rx2 = t 公式(2)
对公式(2)左右两侧分别乘以x1T,得:
s1x1Tx1 - s2x1TRx2 = x1T t 公式(3)
对公式(2)左右两侧分别乘以(Rx2)T,得:
s1(Rx2)Tx1 - s2(Rx2)TRx2 = (Rx2)T t 公式(4)
由公式(3)和公式(4)可以联立,然后可以利用Cramer's法则(参见线性代数书)进行求解。

- 在SVO2中的实现如下
-
bool depthFromTriangulation(
const SE3& T_search_ref,
const Vector3d& f_ref,
const Vector3d& f_cur,
double& depth)
{
Matrix<double,3,2> A; A << T_search_ref.rotation_matrix() * f_ref, f_cur;
const Matrix2d AtA = A.transpose()*A;
if(AtA.determinant() < 0.000001)
return false;
// d = - (ATA)^(-1) * AT * t
const Vector2d depth2 = - AtA.inverse()*A.transpose()*T_search_ref.translation();
depth = fabs(depth2[0]);
return true;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号