

1原有的渲染函数修改
1 添加json路径
print("model.extract(args).source_path",model.extract(args).source_path)
print("model.extract(args).model_path",model.extract(args).model_path)
print("args.iteration",args.iteration)
#model.extract(args).source_path /home/dongdong/2project/0data/house3/100/colmap7
#model.extract(args).model_path /home/dongdong/2project/0data/house3/100/gs_out7
# Initialize system state (RNG)
safe_state(args.quiet)
render_sets(model.extract(args), args.iteration, pipeline.extract(args), args.skip_train, args.skip_test,args.track_path,args.save_path)
2添加家在函数
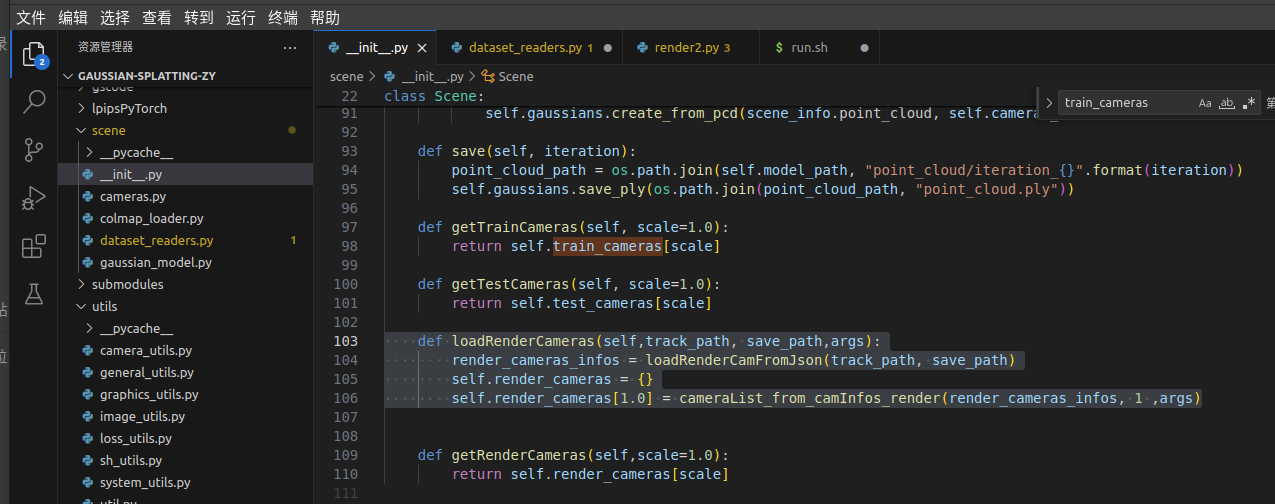
def loadRenderCameras(self,track_path, save_path,args):
render_cameras_infos = loadRenderCamFromJson(track_path, save_path)
self.render_cameras = {}
self.render_cameras[1.0] = cameraList_from_camInfos_render(render_cameras_infos, 1 ,args)
json数据格式
{
"camera_angle_x": 1.1168334919260177, 视场角度x
"camera_angle_y": 0.6916973331686856, 视场角度y
"fl_x": 1536.6241314375784, 像素焦距fx (像素个数) = f_x焦距(米)/单个像素物理长度(米)
"fl_y": 1498.621663983134, 像素焦距fy (像素个数) = f_y焦距(米)/单个像素物理长度(米)
"k1": 0.0, 畸变系数
"k2": 0.0,
"k3": 0.0,
"k4": 0,
"p1": 0.0,
"p2": 0.0,
"is_fisheye": false,
"cx": 960.0, 中心
"cy": 540.0, 中心
"w": 1920.0,
"h": 1080.0,
"aabb_scale": 1,
"frames": [
{
"file_path": "./images/0001.jpg",
"sharpness": 1,
"transform_matrix": [
[
0.9999527616170583,
0.00279275512886567,
0.009309943781165604,
-4.738427091683277
],
[
-0.002729430736777636,
0.9999731031529604,
-0.006807582426336303,
2.9547333944796534
],
[
-0.009328705283768106,
0.006781850000436799,
0.9999334886722716,
2.240625948778779
],
[
0.0,
0.0,
0.0,
1.0
]
],
"cx": 960.0,
"cy": 540.0,
"w": 1920.0,
"h": 1080.0,
"k1": 0.0,
"k2": 0.0,
"k3": 0.0,
"k4": 0,
"p1": 0.0,
"p2": 0.0,
"camera_angle_x": 1.1168334919260177,
"camera_angle_y": 0.6916973331686856,
"fl_x": 1536.6241314375784,
"fl_y": 1498.621663983134
},
{
"file_path": "./images/0002.jpg",
"sharpness": 1,
"transform_matrix": [
[
0.9999527616170583,
0.00279275512886567,
0.009309943781165604,
-4.7374427825107475
],
[
-0.002729430736777636,
0.9999731031529604,
-0.006807582426336303,
2.954988109418036
],
[
-0.009328705283768106,
0.006781850000436799,
0.9999334886722716,
2.240385724373548
],
[
0.0,
0.0,
0.0,
1.0
]
],
"cx": 960.0,
"cy": 540.0,
"w": 1920.0,
"h": 1080.0,
"k1": 0.0,
"k2": 0.0,
"k3": 0.0,
"k4": 0,
"p1": 0.0,
"p2": 0.0,
"camera_angle_x": 1.1168334919260177,
"camera_angle_y": 0.6916973331686856,
"fl_x": 1536.6241314375784,
"fl_y": 1498.621663983134
},
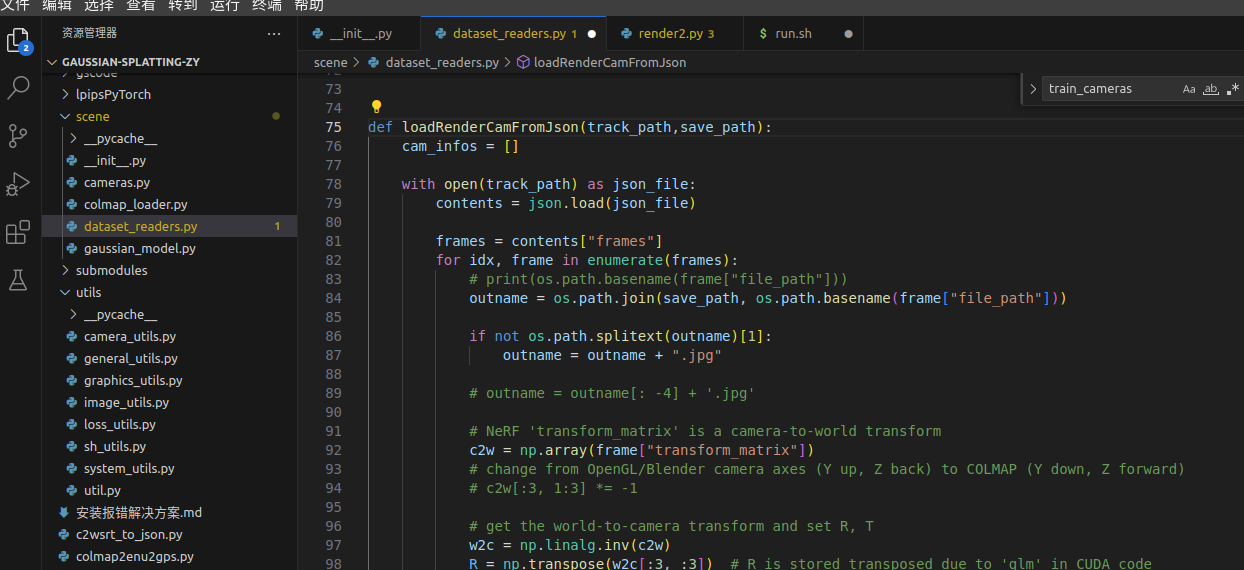
2-1加载函数
def loadRenderCamFromJson(track_path,save_path):
cam_infos = []
with open(track_path) as json_file:
contents = json.load(json_file)
frames = contents["frames"]
for idx, frame in enumerate(frames):
# print(os.path.basename(frame["file_path"]))
outname = os.path.join(save_path, os.path.basename(frame["file_path"]))
if not os.path.splitext(outname)[1]:
outname = outname + ".jpg"
# outname = outname[: -4] + '.jpg'
# NeRF 'transform_matrix' is a camera-to-world transform
c2w = np.array(frame["transform_matrix"])
# change from OpenGL/Blender camera axes (Y up, Z back) to COLMAP (Y down, Z forward)
# c2w[:3, 1:3] *= -1
# get the world-to-camera transform and set R, T
w2c = np.linalg.inv(c2w)
R = np.transpose(w2c[:3, :3]) # R is stored transposed due to 'glm' in CUDA code
T = w2c[:3, 3]
width = frame["w"]
height = frame["h"]
# fx = frame["fl_x"]
# fy = frame["fl_y"]
fx = 1536.6241314375784
fy = 1498.621663983134
# fjx ??? why
# fovx = frame["camera_angle_x"]
# # fovy = frame["camera_angle_y"]
# fovy = focal2fov(fov2focal(fovx, width), height)
# # fovx = fovy
cx = frame["cx"]
cy = frame["cy"]
# fovy = focal2fov(fov2focal(fovx, image.size[0]), image.size[1])
# wyl
FovY = focal2fov(fy,height)
FovX = focal2fov(fx,width)
image = np.zeros((1080,1920,3),dtype=np.uint8)
cam_info = CameraInfo(uid=idx, R=R, T=T, FovY=FovY, FovX=FovX, image=image,
image_path=" ", image_name=outname, width=width, height=height,
cx=cx,
cy=cy)
cam_infos.append(cam_info)
return cam_infos
2-2转化函数 原先自带的
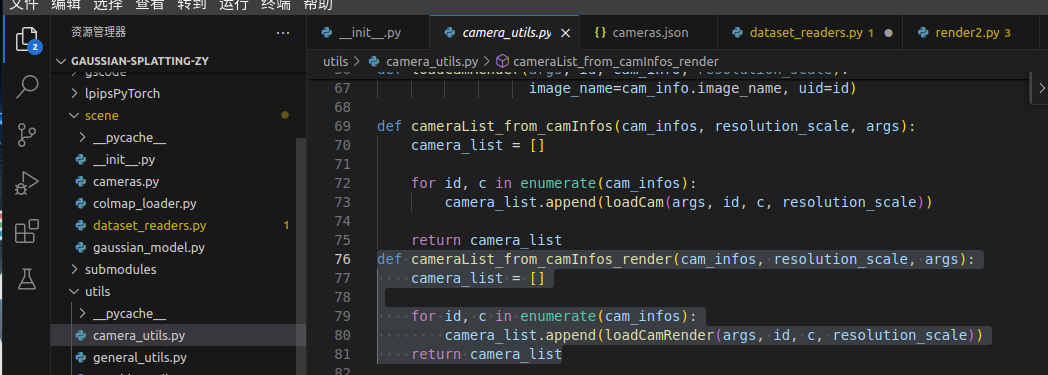
def cameraList_from_camInfos_render(cam_infos, resolution_scale, args):
camera_list = []
for id, c in enumerate(cam_infos):
camera_list.append(loadCamRender(args, id, c, resolution_scale))
return camera_list
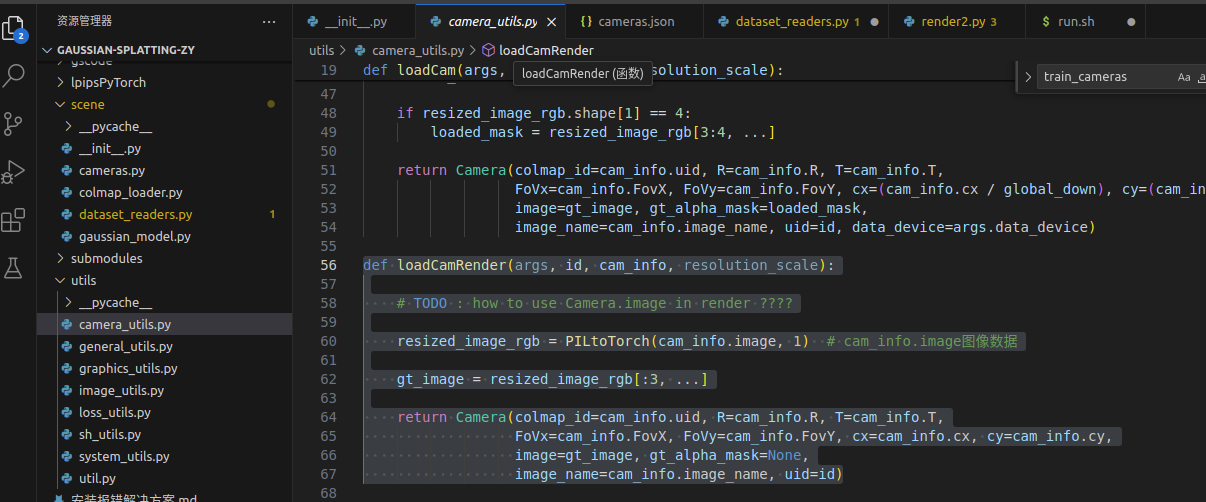
def loadCamRender(args, id, cam_info, resolution_scale):
# TODO : how to use Camera.image in render ????
resized_image_rgb = PILtoTorch(cam_info.image, 1) # cam_info.image图像数据
gt_image = resized_image_rgb[:3, ...]
return Camera(colmap_id=cam_info.uid, R=cam_info.R, T=cam_info.T,
FoVx=cam_info.FovX, FoVy=cam_info.FovY, cx=cam_info.cx, cy=cam_info.cy,
image=gt_image, gt_alpha_mask=None,
image_name=cam_info.image_name, uid=id)
3 数据给渲染函数
调用
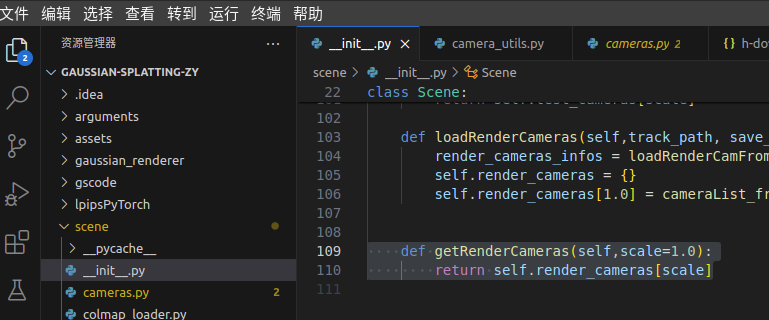
def getRenderCameras(self,scale=1.0):
return self.render_cameras[scale]
完整代码
render.py
#
# Copyright (C) 2023, Inria
# GRAPHDECO research group, https://team.inria.fr/graphdeco
# All rights reserved.
#
# This software is free for non-commercial, research and evaluation use
# under the terms of the LICENSE.md file.
#
# For inquiries contact george.drettakis@inria.fr
#
import torch
from scene import Scene
import os
from tqdm import tqdm
from os import makedirs
from gaussian_renderer import render
import torchvision
from utils.general_utils import safe_state
from argparse import ArgumentParser
from arguments import ModelParams, PipelineParams, get_combined_args
from gaussian_renderer import GaussianModel
def render_set(model_path, name, iteration, views, gaussians, pipeline, background):
# render_path = os.path.join(model_path, name, "ours_{}".format(iteration), "renders")
# gts_path = os.path.join(model_path, name, "ours_{}".format(iteration), "gt")
#
# makedirs(render_path, exist_ok=True)
# makedirs(gts_path, exist_ok=True)
for idx, view in enumerate(tqdm(views, desc="Rendering progress")):
rendering = render(view, gaussians, pipeline, background)["render"]
# gt = view.original_image[0:3, :, :]
torchvision.utils.save_image(rendering, view.image_name)
# torchvision.utils.save_image(gt, os.path.join(gts_path, '{0:05d}'.format(idx) + ".jpg"))
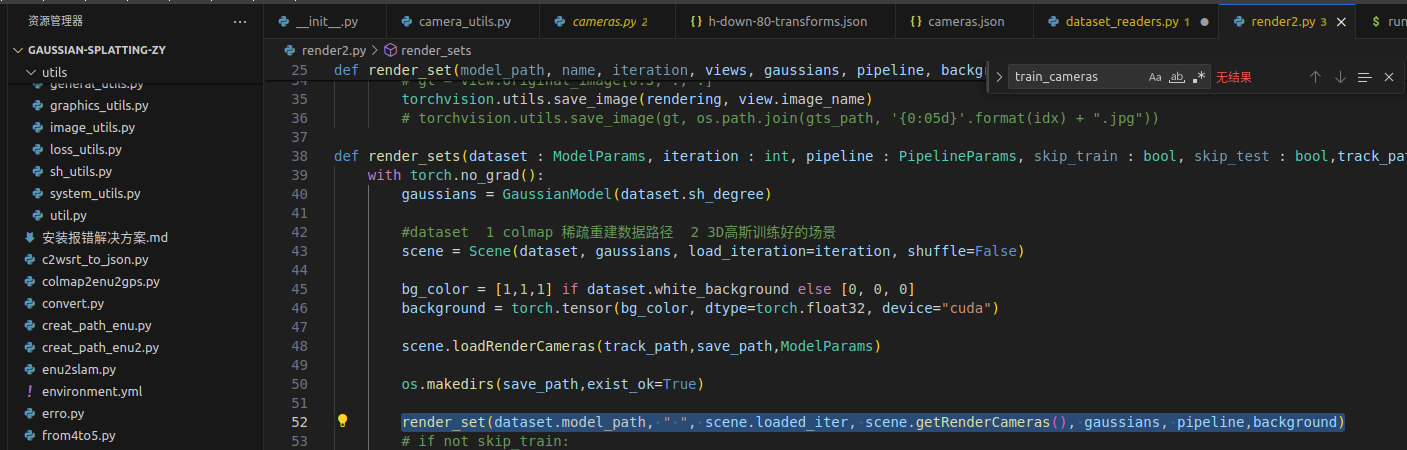
def render_sets(dataset : ModelParams, iteration : int, pipeline : PipelineParams, skip_train : bool, skip_test : bool,track_path:str,save_path:str):
with torch.no_grad():
gaussians = GaussianModel(dataset.sh_degree)
#dataset 1 colmap 稀疏重建数据路径 2 3D高斯训练好的场景
scene = Scene(dataset, gaussians, load_iteration=iteration, shuffle=False)
bg_color = [1,1,1] if dataset.white_background else [0, 0, 0]
background = torch.tensor(bg_color, dtype=torch.float32, device="cuda")
scene.loadRenderCameras(track_path,save_path,ModelParams)
os.makedirs(save_path,exist_ok=True)
render_set(dataset.model_path, " ", scene.loaded_iter, scene.getRenderCameras(), gaussians, pipeline,background)
# if not skip_train:
# render_set(dataset.model_path, "train", scene.loaded_iter, scene.getTrainCameras(), gaussians, pipeline, background)
#
# if not skip_test:
# render_set(dataset.model_path, "test", scene.loaded_iter, scene.getTestCameras(), gaussians, pipeline, background)
if __name__ == "__main__":
# Set up command line argument parser
parser = ArgumentParser(description="Testing script parameters")
model = ModelParams(parser, sentinel=True)
pipeline = PipelineParams(parser)
parser.add_argument("--iteration", default=-1, type=int)
parser.add_argument("--skip_train", action="store_true")
parser.add_argument("--skip_test", action="store_true")
parser.add_argument("--quiet", action="store_true")
parser.add_argument("--track_path", default="", type=str)
parser.add_argument("--save_path", default="", type=str)
parser.add_argument("--width", default=1920, type=int)
parser.add_argument("--height", default=1080, type=int)
args = get_combined_args(parser)
print("1训练好的模型路径 -m " + args.model_path)
'''
2 Config file found: /home/dongdong/2project/0data/house3/100/gs_out7/cfg_args
2-1 记录了 1colmap重建路径
colmap/images
colmap/spares/0/...
2 参数
'''
print("model.extract(args).source_path",model.extract(args).source_path)
print("model.extract(args).model_path",model.extract(args).model_path)
print("args.iteration",args.iteration)
#model.extract(args).source_path /home/dongdong/2project/0data/house3/100/colmap7
#model.extract(args).model_path /home/dongdong/2project/0data/house3/100/gs_out7
# Initialize system state (RNG)
safe_state(args.quiet)
render_sets(model.extract(args), args.iteration, pipeline.extract(args), args.skip_train, args.skip_test,args.track_path,args.save_path)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号