

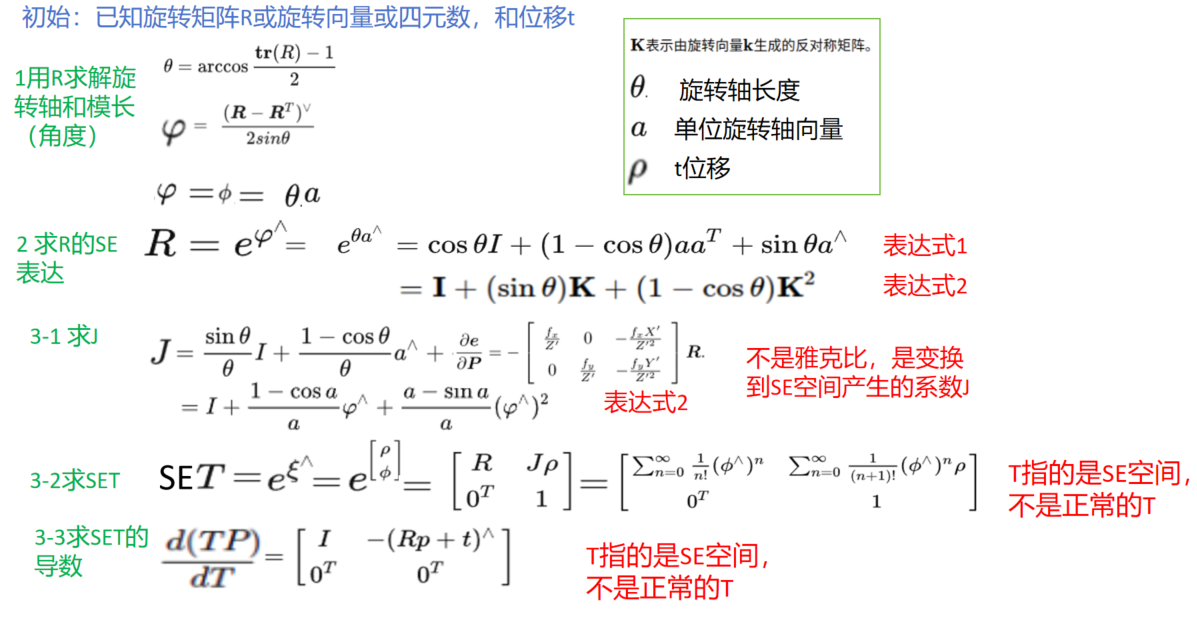
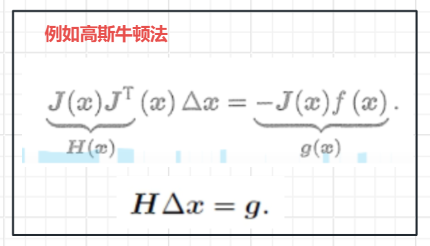
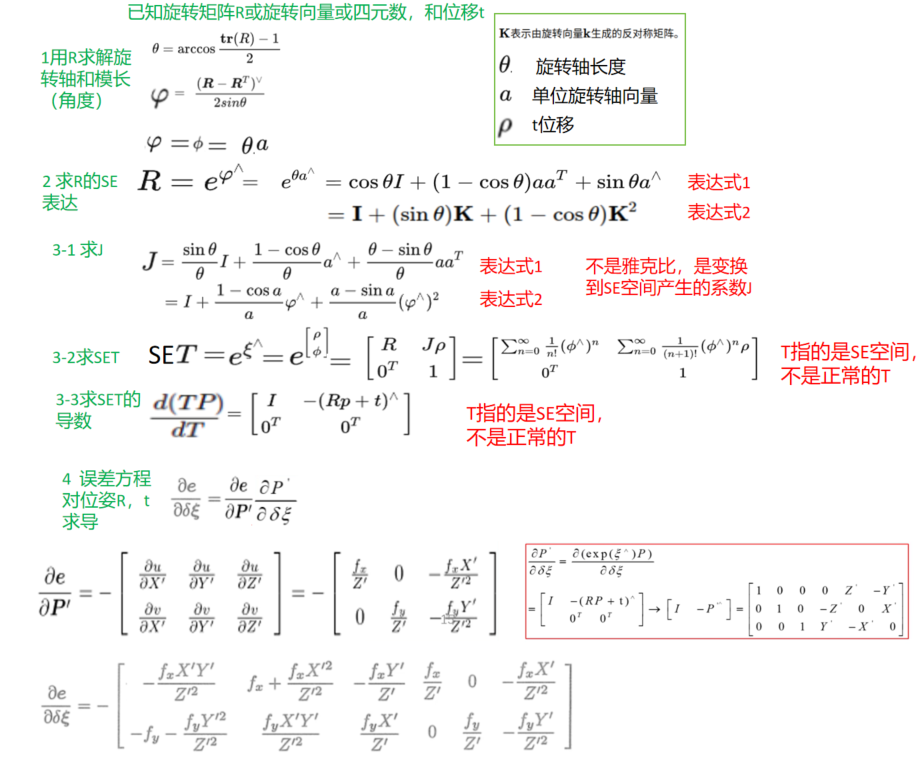
1 理论数学基础
https://www.cnblogs.com/gooutlook/p/17840013.html

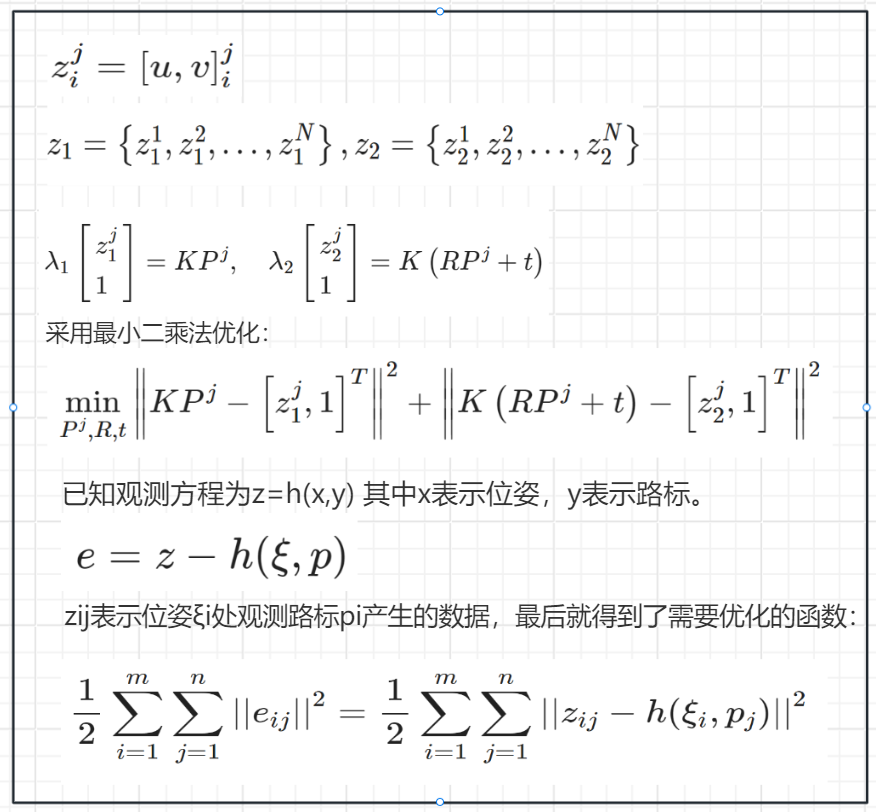
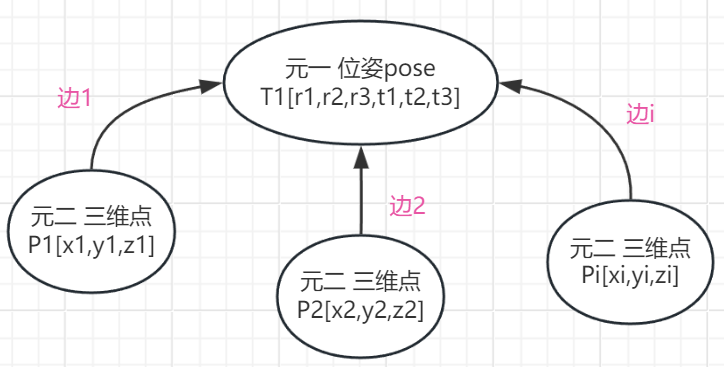
2 BA优化原理
https://www.cnblogs.com/gooutlook/p/17832164.html
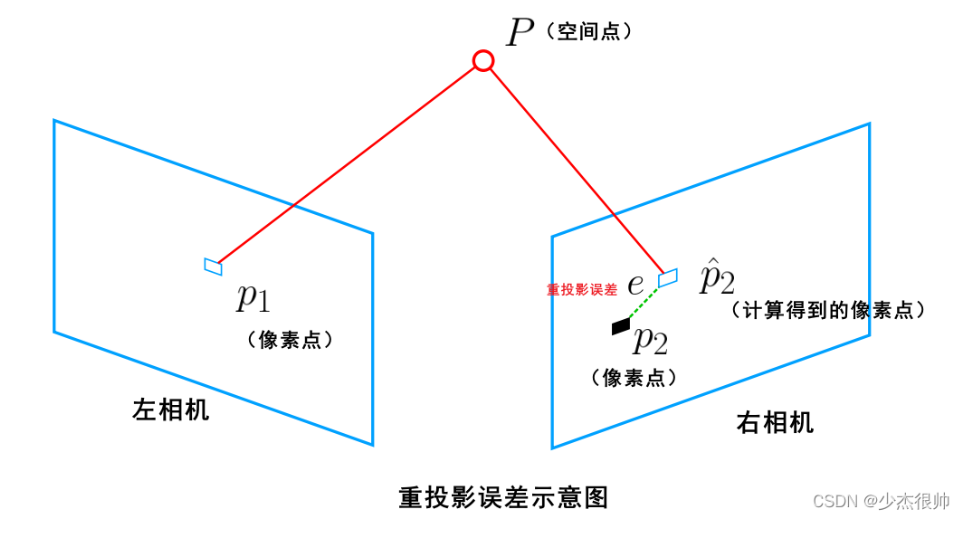
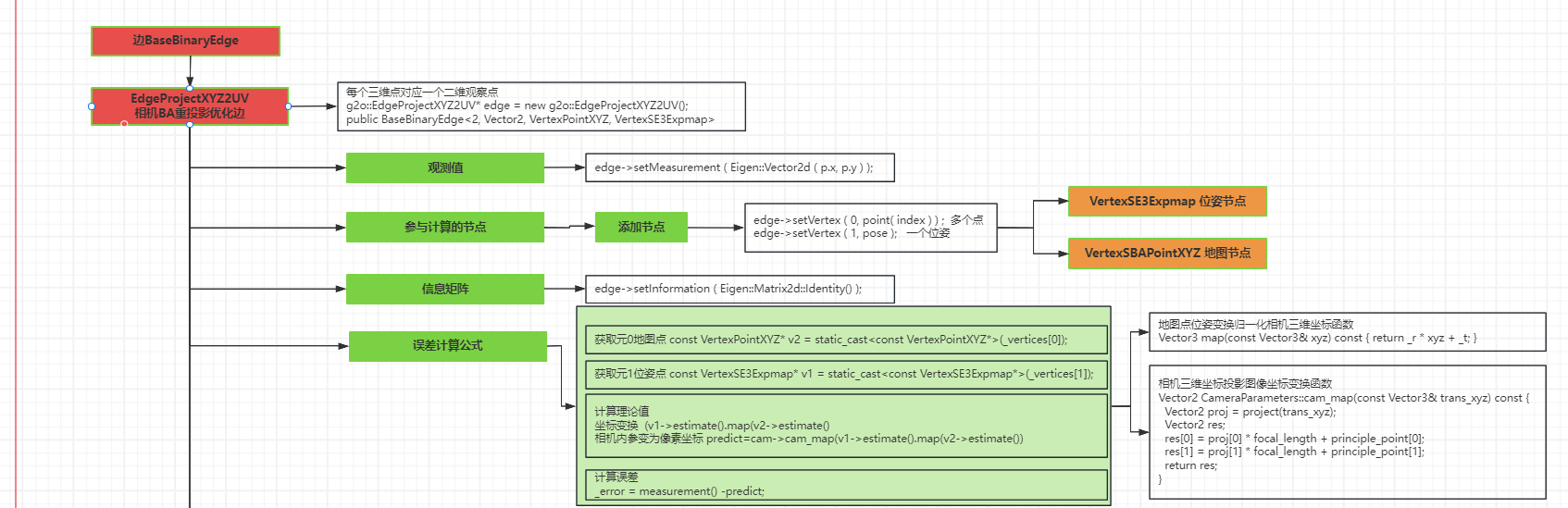
观测值 y_data[i] (ui,vi)像素坐标 预测值 y_predict[i] (ui,vi)= 1/zi*K*T1*Pi 像素坐标 --差值error=y_predict[i]-y_data[i] 说明: y_data[i] edge->setMeasurement ( Eigen::Vector2d ( p.x, p.y ) ); --- Pi 三维点节点带入 point->setEstimate ( Eigen::Vector3d ( p.x, p.y, p.z ) ); T1位姿点节点带入 pose->setEstimate ( g2o::SE3Quat (R,t) K 相机内参

观测值 y_data[i] (ui,vi)像素坐标 预测值 y_predict[i] (ui,vi)= 1/zi*K*Tj*Pi 像素坐标 --差值error=y_predict[i]-y_data[i] 说明: y_data[i] edge->setMeasurement ( Eigen::Vector2d ( p.x, p.y ) ); --- Pi 三维点节点带入 point->setEstimate ( Eigen::Vector3d ( p.x, p.y, p.z ) ); Tj 位姿点节点带入 pose->setEstimate ( g2o::SE3Quat (R,t) K 相机内参




1节点


1-1位姿节点
vertex_se3_expmap.h
// g2o - General Graph Optimization
#ifndef G2O_SBA_VERTEXSE3EXPMAP_H
#define G2O_SBA_VERTEXSE3EXPMAP_H
#include "g2o/core/base_vertex.h"
#include "g2o/types/slam3d/se3quat.h"
#include "g2o_types_sba_api.h"
namespace g2o {
/**
* \brief SE3 Vertex parameterized internally with a transformation matrix
* and externally with its exponential map
*/
class G2O_TYPES_SBA_API VertexSE3Expmap : public BaseVertex<6, SE3Quat> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSE3Expmap();
bool read(std::istream& is);
bool write(std::ostream& os) const;
void setToOriginImpl();
void oplusImpl(const double* update_);
};
} // namespace g2o
#endif
vertex_se3_expmap.cpp
// g2o - General Graph Optimization
#include "vertex_se3_expmap.h"
#include "g2o/stuff/misc.h"
namespace g2o {
VertexSE3Expmap::VertexSE3Expmap() : BaseVertex<6, SE3Quat>() {}
bool VertexSE3Expmap::read(std::istream& is) {
Vector7 est;
internal::readVector(is, est);
setEstimate(SE3Quat(est).inverse());
return true;
}
bool VertexSE3Expmap::write(std::ostream& os) const {
return internal::writeVector(os, estimate().inverse().toVector());
}
void VertexSE3Expmap::setToOriginImpl() { _estimate = SE3Quat(); }
void VertexSE3Expmap::oplusImpl(const double* update_) {
Eigen::Map<const Vector6> update(update_);
setEstimate(SE3Quat::exp(update) * estimate());
}
} // namespace g2o
其他说明
输入数据 6, SE3Quat
SE3Quat是由 Vector6 <double > r 1*3 t 1*3组成 或者 R 3*3 t 1*3 初始化 或者 R 四元数 t
每次跟新结果是 6, SE3Quat
SE3Quat T(vj->estimate())
跟新以后
Eigen::Map<const Vector6> update(update_);
setEstimate(SE3Quat::exp(update) * estimate());
SE3Quat::exp(update) 返回 SE3Quat(Quaternion(R), V * upsilon)
乘号被重写了
inline SE3Quat operator*(const SE3Quat& tr2) const {
SE3Quat result(*this);
result._t += _r * tr2._t;
result._r *= tr2._r;
result.normalizeRotation();
return result;
}
最终迭代跟新
_error = measurement() - cam->cam_map(v1->estimate().map(v2->estimate()));
v1->estimate()和v2->estimate()都是SE3Quat类型
SE3Quat.map()函数
Vector3 map(const Vector3& xyz) const { return _r * xyz + _t; }
SE3Quat类


函数
1初始化
初始化1
SE3Quat(const Matrix3& R, const Vector3& t) : _r(Quaternion(R)), _t(t) {
normalizeRotation();
}
初始化2
SE3Quat(const Quaternion& q, const Vector3& t) : _r(q), _t(t) {
normalizeRotation();
}
初始化3 当参数是6个时候 自动把6个参数拆解成 _t和_r
template <typename Derived>
explicit SE3Quat(const Eigen::MatrixBase<Derived>& v) {
assert((v.size() == 6 || v.size() == 7) &&
"Vector dimension does not match");
if (v.size() == 6) {
for (int i = 0; i < 3; i++) {
_t[i] = v[i];
_r.coeffs()(i) = v[i + 3];
}
_r.w() = 0.; // recover the positive w
if (_r.norm() > 1.) {
_r.normalize();
} else {
double w2 = cst(1.) - _r.squaredNorm();
_r.w() = (w2 < cst(0.)) ? cst(0.) : std::sqrt(w2);
}
}
else if (v.size() == 7) {
int idx = 0;
for (int i = 0; i < 3; ++i, ++idx) _t(i) = v(idx);
for (int i = 0; i < 4; ++i, ++idx) _r.coeffs()(i) = v(idx);
normalizeRotation();
}
}
2变换
Vector3 map(const Vector3& xyz) const { return s * (r * xyz) + t; }
其中r,t是初始化时候直接拆解的。
3 乘法更新
static SE3Quat exp(const Vector6& update) {
Vector3 omega;
for (int i = 0; i < 3; i++) omega[i] = update[i];
Vector3 upsilon;
for (int i = 0; i < 3; i++) upsilon[i] = update[i + 3];
double theta = omega.norm();
Matrix3 Omega = skew(omega);
Matrix3 R;
Matrix3 V;
if (theta < cst(0.00001)) {
Matrix3 Omega2 = Omega * Omega;
R = (Matrix3::Identity() + Omega + cst(0.5) * Omega2);
V = (Matrix3::Identity() + cst(0.5) * Omega + cst(1.) / cst(6.) * Omega2);
} else {
Matrix3 Omega2 = Omega * Omega;
R = (Matrix3::Identity() + std::sin(theta) / theta * Omega +
(1 - std::cos(theta)) / (theta * theta) * Omega2);
V = (Matrix3::Identity() +
(1 - std::cos(theta)) / (theta * theta) * Omega +
(theta - std::sin(theta)) / (std::pow(theta, 3)) * Omega2);
}
return SE3Quat(Quaternion(R), V * upsilon);
}
1-2 地图点

简化版本 以前的api
class G2O_TYPES_SBA_API VertexSBAPointXYZ : public BaseVertex<3, Vector3>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSBAPointXYZ();
virtual bool read(std::istream& is);
virtual bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate.fill(0);
}
virtual void oplusImpl(const number_t* update)
{
Eigen::Map<const Vector3> v(update);
_estimate += v;
}
};
复杂版本 最新的api
vertex_pointxyz.h
// g2o - General Graph Optimization
#ifndef G2O_VERTEX_TRACKXYZ_H_
#define G2O_VERTEX_TRACKXYZ_H_
#include "g2o/core/base_vertex.h"
#include "g2o/core/hyper_graph_action.h"
#include "g2o_types_slam3d_api.h"
namespace g2o {
/**
* \brief Vertex for a tracked point in space
*/
class G2O_TYPES_SLAM3D_API VertexPointXYZ : public BaseVertex<3, Vector3> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexPointXYZ() {}
virtual bool read(std::istream& is);
virtual bool write(std::ostream& os) const;
virtual void setToOriginImpl() { _estimate.fill(0.); }
virtual void oplusImpl(const double* update_) {
Eigen::Map<const Vector3> update(update_);
_estimate += update;
}
virtual bool setEstimateDataImpl(const double* est) {
Eigen::Map<const Vector3> estMap(est);
_estimate = estMap;
return true;
}
virtual bool getEstimateData(double* est) const {
Eigen::Map<Vector3> estMap(est);
estMap = _estimate;
return true;
}
virtual int estimateDimension() const { return Dimension; }
virtual bool setMinimalEstimateDataImpl(const double* est) {
_estimate = Eigen::Map<const Vector3>(est);
return true;
}
virtual bool getMinimalEstimateData(double* est) const {
Eigen::Map<Vector3> v(est);
v = _estimate;
return true;
}
virtual int minimalEstimateDimension() const { return Dimension; }
};
class G2O_TYPES_SLAM3D_API VertexPointXYZWriteGnuplotAction
: public WriteGnuplotAction {
public:
VertexPointXYZWriteGnuplotAction();
virtual HyperGraphElementAction* operator()(
HyperGraph::HyperGraphElement* element,
HyperGraphElementAction::Parameters* params_);
};
#ifdef G2O_HAVE_OPENGL
/**
* \brief visualize a 3D point
*/
class VertexPointXYZDrawAction : public DrawAction {
public:
VertexPointXYZDrawAction();
virtual HyperGraphElementAction* operator()(
HyperGraph::HyperGraphElement* element,
HyperGraphElementAction::Parameters* params_);
protected:
FloatProperty* _pointSize;
virtual bool refreshPropertyPtrs(
HyperGraphElementAction::Parameters* params_);
};
#endif
} // namespace g2o
#endif
vertex_pointxyz.cpp
// g2o - General Graph Optimization
#include "vertex_pointxyz.h"
#include <stdio.h>
#ifdef G2O_HAVE_OPENGL
#include "g2o/stuff/opengl_primitives.h"
#include "g2o/stuff/opengl_wrapper.h"
#endif
#include <typeinfo>
namespace g2o {
bool VertexPointXYZ::read(std::istream& is) {
return internal::readVector(is, _estimate);
}
bool VertexPointXYZ::write(std::ostream& os) const {
return internal::writeVector(os, estimate());
}
#ifdef G2O_HAVE_OPENGL
VertexPointXYZDrawAction::VertexPointXYZDrawAction()
: DrawAction(typeid(VertexPointXYZ).name()), _pointSize(nullptr) {}
bool VertexPointXYZDrawAction::refreshPropertyPtrs(
HyperGraphElementAction::Parameters* params_) {
if (!DrawAction::refreshPropertyPtrs(params_)) return false;
if (_previousParams) {
_pointSize = _previousParams->makeProperty<FloatProperty>(
_typeName + "::POINT_SIZE", 1.);
} else {
_pointSize = nullptr;
}
return true;
}
HyperGraphElementAction* VertexPointXYZDrawAction::operator()(
HyperGraph::HyperGraphElement* element,
HyperGraphElementAction::Parameters* params) {
if (typeid(*element).name() != _typeName) return nullptr;
initializeDrawActionsCache();
refreshPropertyPtrs(params);
if (!_previousParams) return this;
if (_show && !_show->value()) return this;
VertexPointXYZ* that = static_cast<VertexPointXYZ*>(element);
glPushMatrix();
glPushAttrib(GL_ENABLE_BIT | GL_POINT_BIT);
glDisable(GL_LIGHTING);
glColor3f(LANDMARK_VERTEX_COLOR);
float ps = _pointSize ? _pointSize->value() : 1.f;
glTranslatef((float)that->estimate()(0), (float)that->estimate()(1),
(float)that->estimate()(2));
opengl::drawPoint(ps);
glPopAttrib();
drawCache(that->cacheContainer(), params);
drawUserData(that->userData(), params);
glPopMatrix();
return this;
}
#endif
VertexPointXYZWriteGnuplotAction::VertexPointXYZWriteGnuplotAction()
: WriteGnuplotAction(typeid(VertexPointXYZ).name()) {}
HyperGraphElementAction* VertexPointXYZWriteGnuplotAction::operator()(
HyperGraph::HyperGraphElement* element,
HyperGraphElementAction::Parameters* params_) {
if (typeid(*element).name() != _typeName) return nullptr;
WriteGnuplotAction::Parameters* params =
static_cast<WriteGnuplotAction::Parameters*>(params_);
if (!params->os) {
return nullptr;
}
VertexPointXYZ* v = static_cast<VertexPointXYZ*>(element);
*(params->os) << v->estimate().x() << " " << v->estimate().y() << " "
<< v->estimate().z() << " " << std::endl;
return this;
}
} // namespace g2o
2边
二元边
edge_project_xyz2uv.h
// g2o - General Graph Optimization
#ifndef G2O_SBA_EDGEPROJECTXYZ2UV_H
#define G2O_SBA_EDGEPROJECTXYZ2UV_H
#include "g2o/core/base_binary_edge.h"
#include "g2o/types/slam3d/vertex_pointxyz.h"
#include "g2o_types_sba_api.h"
#include "parameter_cameraparameters.h"
#include "vertex_se3_expmap.h"
namespace g2o {
class G2O_TYPES_SBA_API EdgeProjectXYZ2UV
: public BaseBinaryEdge<2, Vector2, VertexPointXYZ, VertexSE3Expmap> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjectXYZ2UV();
bool read(std::istream& is);
bool write(std::ostream& os) const;
void computeError();
virtual void linearizeOplus();
public:
CameraParameters* _cam; // TODO make protected member?
};
} // namespace g2o
#endif
edge_project_xyz2uv.cpp
// g2o - General Graph Optimization
#include "edge_project_xyz2uv.h"
namespace g2o {
EdgeProjectXYZ2UV::EdgeProjectXYZ2UV()
: BaseBinaryEdge<2, Vector2, VertexPointXYZ, VertexSE3Expmap>() {
_cam = 0;
resizeParameters(1);
installParameter(_cam, 0);
}
bool EdgeProjectXYZ2UV::read(std::istream& is) {
readParamIds(is);
internal::readVector(is, _measurement);
return readInformationMatrix(is);
}
bool EdgeProjectXYZ2UV::write(std::ostream& os) const {
writeParamIds(os);
internal::writeVector(os, measurement());
return writeInformationMatrix(os);
}
void EdgeProjectXYZ2UV::computeError() {
const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[1]);
const VertexPointXYZ* v2 = static_cast<const VertexPointXYZ*>(_vertices[0]);
const CameraParameters* cam =
static_cast<const CameraParameters*>(parameter(0));
_error = measurement() - cam->cam_map(v1->estimate().map(v2->estimate()));
}
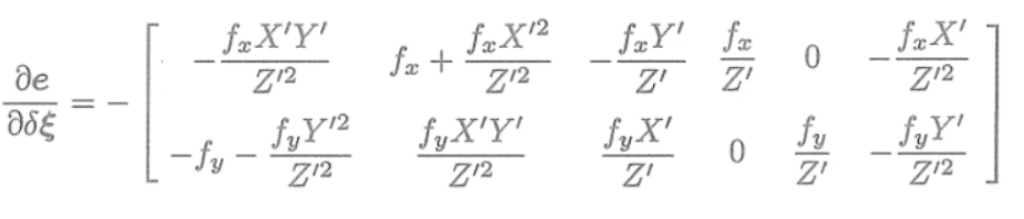
void EdgeProjectXYZ2UV::linearizeOplus() {
VertexSE3Expmap* vj = static_cast<VertexSE3Expmap*>(_vertices[1]);
SE3Quat T(vj->estimate());
VertexPointXYZ* vi = static_cast<VertexPointXYZ*>(_vertices[0]);
Vector3 xyz = vi->estimate();
Vector3 xyz_trans = T.map(xyz);
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
double z_2 = z * z;
const CameraParameters* cam =
static_cast<const CameraParameters*>(parameter(0));
Eigen::Matrix<double, 2, 3, Eigen::ColMajor> tmp;
tmp(0, 0) = cam->focal_length;
tmp(0, 1) = 0;
tmp(0, 2) = -x / z * cam->focal_length;
tmp(1, 0) = 0;
tmp(1, 1) = cam->focal_length;
tmp(1, 2) = -y / z * cam->focal_length;
_jacobianOplusXi = -1. / z * tmp * T.rotation().toRotationMatrix();
_jacobianOplusXj(0, 0) = x * y / z_2 * cam->focal_length;
_jacobianOplusXj(0, 1) = -(1 + (x * x / z_2)) * cam->focal_length;
_jacobianOplusXj(0, 2) = y / z * cam->focal_length;
_jacobianOplusXj(0, 3) = -1. / z * cam->focal_length;
_jacobianOplusXj(0, 4) = 0;
_jacobianOplusXj(0, 5) = x / z_2 * cam->focal_length;
_jacobianOplusXj(1, 0) = (1 + y * y / z_2) * cam->focal_length;
_jacobianOplusXj(1, 1) = -x * y / z_2 * cam->focal_length;
_jacobianOplusXj(1, 2) = -x / z * cam->focal_length;
_jacobianOplusXj(1, 3) = 0;
_jacobianOplusXj(1, 4) = -1. / z * cam->focal_length;
_jacobianOplusXj(1, 5) = y / z_2 * cam->focal_length;
}
} // namespace g2o
残差
代码调用
https://github.com/gaoxia
mian.cpp
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/solvers/csparse/linear_solver_csparse.h>
#include <g2o/types/sba/types_six_dof_expmap.h>
#include <chrono>
using namespace std;
using namespace cv;
void find_feature_matches (
const Mat& img_1, const Mat& img_2,
std::vector<KeyPoint>& keypoints_1,
std::vector<KeyPoint>& keypoints_2,
std::vector< DMatch >& matches );
// 像素坐标转相机归一化坐标
Point2d pixel2cam ( const Point2d& p, const Mat& K );
void bundleAdjustment (
const vector<Point3f> points_3d,
const vector<Point2f> points_2d,
const Mat& K,
Mat& R, Mat& t
);
int main ( int argc, char** argv )
{
if ( argc != 5 )
{
cout<<"usage: pose_estimation_3d2d img1 img2 depth1 depth2"<<endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread ( argv[1], CV_LOAD_IMAGE_COLOR );
Mat img_2 = imread ( argv[2], CV_LOAD_IMAGE_COLOR );
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches ( img_1, img_2, keypoints_1, keypoints_2, matches );
cout<<"一共找到了"<<matches.size() <<"组匹配点"<<endl;
// 建立3D点
Mat d1 = imread ( argv[3], CV_LOAD_IMAGE_UNCHANGED ); // 深度图为16位无符号数,单通道图像
Mat K = ( Mat_<double> ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 );
vector<Point3f> pts_3d;
vector<Point2f> pts_2d;
for ( DMatch m:matches )
{
ushort d = d1.ptr<unsigned short> (int ( keypoints_1[m.queryIdx].pt.y )) [ int ( keypoints_1[m.queryIdx].pt.x ) ];
if ( d == 0 ) // bad depth
continue;
float dd = d/5000.0;
Point2d p1 = pixel2cam ( keypoints_1[m.queryIdx].pt, K );
pts_3d.push_back ( Point3f ( p1.x*dd, p1.y*dd, dd ) );
pts_2d.push_back ( keypoints_2[m.trainIdx].pt );
}
cout<<"3d-2d pairs: "<<pts_3d.size() <<endl;
Mat r, t;
solvePnP ( pts_3d, pts_2d, K, Mat(), r, t, false ); // 调用OpenCV 的 PnP 求解,可选择EPNP,DLS等方法
Mat R;
cv::Rodrigues ( r, R ); // r为旋转向量形式,用Rodrigues公式转换为矩阵
cout<<"R="<<endl<<R<<endl;
cout<<"t="<<endl<<t<<endl;
cout<<"calling bundle adjustment"<<endl;
bundleAdjustment ( pts_3d, pts_2d, K, R, t );
}
void find_feature_matches ( const Mat& img_1, const Mat& img_2,
std::vector<KeyPoint>& keypoints_1,
std::vector<KeyPoint>& keypoints_2,
std::vector< DMatch >& matches )
{
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create ( "BruteForce-Hamming" );
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect ( img_1,keypoints_1 );
detector->detect ( img_2,keypoints_2 );
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute ( img_1, keypoints_1, descriptors_1 );
descriptor->compute ( img_2, keypoints_2, descriptors_2 );
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match ( descriptors_1, descriptors_2, match );
//-- 第四步:匹配点对筛选
double min_dist=10000, max_dist=0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for ( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = match[i].distance;
if ( dist < min_dist ) min_dist = dist;
if ( dist > max_dist ) max_dist = dist;
}
printf ( "-- Max dist : %f \n", max_dist );
printf ( "-- Min dist : %f \n", min_dist );
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for ( int i = 0; i < descriptors_1.rows; i++ )
{
if ( match[i].distance <= max ( 2*min_dist, 30.0 ) )
{
matches.push_back ( match[i] );
}
}
}
Point2d pixel2cam ( const Point2d& p, const Mat& K )
{
return Point2d
(
( p.x - K.at<double> ( 0,2 ) ) / K.at<double> ( 0,0 ),
( p.y - K.at<double> ( 1,2 ) ) / K.at<double> ( 1,1 )
);
}
void bundleAdjustment (
const vector< Point3f > points_3d,
const vector< Point2f > points_2d,
const Mat& K,
Mat& R, Mat& t )
{
// 初始化g2o
typedef g2o::BlockSolver< g2o::BlockSolverTraits<6,3> > Block; // pose 维度为 6, landmark 维度为 3
Block::LinearSolverType* linearSolver = new g2o::LinearSolverCSparse<Block::PoseMatrixType>(); // 线性方程求解器
Block* solver_ptr = new Block ( linearSolver ); // 矩阵块求解器
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( solver_ptr );
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm ( solver );
// vertex
g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap(); // camera pose
Eigen::Matrix3d R_mat;
R_mat <<
R.at<double> ( 0,0 ), R.at<double> ( 0,1 ), R.at<double> ( 0,2 ),
R.at<double> ( 1,0 ), R.at<double> ( 1,1 ), R.at<double> ( 1,2 ),
R.at<double> ( 2,0 ), R.at<double> ( 2,1 ), R.at<double> ( 2,2 );
pose->setId ( 0 );
pose->setEstimate ( g2o::SE3Quat (
R_mat,
Eigen::Vector3d ( t.at<double> ( 0,0 ), t.at<double> ( 1,0 ), t.at<double> ( 2,0 ) )
) );
optimizer.addVertex ( pose );
int index = 1;
for ( const Point3f p:points_3d ) // landmarks
{
g2o::VertexSBAPointXYZ* point = new g2o::VertexSBAPointXYZ();
point->setId ( index++ );
point->setEstimate ( Eigen::Vector3d ( p.x, p.y, p.z ) );
point->setMarginalized ( true ); // g2o 中必须设置 marg 参见第十讲内容
optimizer.addVertex ( point );
}
// parameter: camera intrinsics
g2o::CameraParameters* camera = new g2o::CameraParameters (
K.at<double> ( 0,0 ), Eigen::Vector2d ( K.at<double> ( 0,2 ), K.at<double> ( 1,2 ) ), 0
);
camera->setId ( 0 );
optimizer.addParameter ( camera );
// edges
index = 1;
for ( const Point2f p:points_2d )
{
g2o::EdgeProjectXYZ2UV* edge = new g2o::EdgeProjectXYZ2UV();
edge->setId ( index );
edge->setVertex ( 0, dynamic_cast<g2o::VertexSBAPointXYZ*> ( optimizer.vertex ( index ) ) );
edge->setVertex ( 1, pose );
edge->setMeasurement ( Eigen::Vector2d ( p.x, p.y ) );
edge->setParameterId ( 0,0 );
edge->setInformation ( Eigen::Matrix2d::Identity() );
optimizer.addEdge ( edge );
index++;
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.setVerbose ( true );
optimizer.initializeOptimization();
optimizer.optimize ( 100 );
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>> ( t2-t1 );
cout<<"optimization costs time: "<<time_used.count() <<" seconds."<<endl;
cout<<endl<<"after optimization:"<<endl;
cout<<"T="<<endl<<Eigen::Isometry3d ( pose->estimate() ).matrix() <<endl;
}
cmake_minimum_required( VERSION 2.8 )
project( vo1 )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 添加cmake模块以使用g2o
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
find_package( OpenCV 3.1 REQUIRED )
# find_package( OpenCV REQUIRED ) # use this if in OpenCV2
find_package( G2O REQUIRED )
find_package( CSparse REQUIRED )
include_directories(
${OpenCV_INCLUDE_DIRS}
${G2O_INCLUDE_DIRS}
${CSPARSE_INCLUDE_DIR}
"/usr/include/eigen3/"
)
add_executable( feature_extraction feature_extraction.cpp )
target_link_libraries( feature_extraction ${OpenCV_LIBS} )
# add_executable( pose_estimation_2d2d pose_estimation_2d2d.cpp extra.cpp ) # use this if in OpenCV2
add_executable( pose_estimation_2d2d pose_estimation_2d2d.cpp )
target_link_libraries( pose_estimation_2d2d ${OpenCV_LIBS} )
# add_executable( triangulation triangulation.cpp extra.cpp) # use this if in opencv2
add_executable( triangulation triangulation.cpp )
target_link_libraries( triangulation ${OpenCV_LIBS} )
add_executable( pose_estimation_3d2d pose_estimation_3d2d.cpp )
target_link_libraries( pose_estimation_3d2d
${OpenCV_LIBS}
${CSPARSE_LIBRARY}
g2o_core g2o_stuff g2o_types_sba g2o_csparse_extension
)
add_executable( pose_estimation_3d3d pose_estimation_3d3d.cpp )
target_link_libraries( pose_estimation_3d3d
${OpenCV_LIBS}
g2o_core g2o_stuff g2o_types_sba g2o_csparse_extension
${CSPARSE_LIBRARY}
)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号