

1安装库教程
https://blog.csdn.net/weixin_44684139/article/details/104803225
0.1 安装eigen3.3以上版本(这里我选用最新的3.3.7,注意3.2系列的不可以!!!)
注意,千万不要使用 sudo apt-get install libeigen3-dev 因为这个命令下载的是3.2版本的eigen,从而无法与模板类的sophus相匹配
正确方法:
(1)在官网(http://eigen.tuxfamily.org/index.php?title=Main_Page)下载安装包:eigen-3.3.7.tar.bz2 ,然后提取到此处
(2)进入文件夹eigen-3.3.7,右键在终端打开。
(3)进行安装
mkdir build cd build cmake .. sudo make install
(4)检查是否安装成功:(忽略其他包。。。)
1.Sophus安装
根据评论,现如今sophus需要依赖fmt库,因此优先安装fmt:
下载
https://fmt.dev/8.1.1/index.html


cd fmt mkdir build cd build cmake .. make sudo make install

然后依旧按照原先的步骤====================================
1.1 自己建立一个文件夹,在终端打开,然后
git下载的可能不是最新的,最好去官网下载
git clone https://github.com/strasdat/Sophus.git cd Sophus/ mkdir build cd build cmake .. make sudo make install


工程
CMakeLists.txt
cmake_minimum_required(VERSION 3.0)
project(useSophus)
# 1-1 为使用 sophus,需要使用find_package命令找到它
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
# 1-2 Eigen
include_directories("/usr/local/include/eigen3")
# 2 编译程序
add_executable(useSophus useSophus.cpp)
target_link_libraries(useSophus ${Sophus_LIBRARIES} fmt)
# 3 新工程
#add_subdirectory(example)
useSophus.cpp
#include <iostream>
#include <cmath>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/se3.hpp"
using namespace std;
using namespace Eigen;
/// 本程序演示sophus的基本用法
int main(int argc, char **argv) {
// 沿Z轴转90度的旋转矩阵
Matrix3d R = AngleAxisd(M_PI / 2, Vector3d(0, 0, 1)).toRotationMatrix();
// 或者四元数
Quaterniond q(R);
Sophus::SO3d SO3_R(R); // Sophus::SO3d可以直接从旋转矩阵构造
Sophus::SO3d SO3_q(q); // 也可以通过四元数构造
// 二者是等价的
cout << "SO(3) from matrix:\n" << SO3_R.matrix() << endl;
cout << "SO(3) from quaternion:\n" << SO3_q.matrix() << endl;
cout << "they are equal" << endl;
// 使用对数映射获得它的李代数
Vector3d so3 = SO3_R.log();
cout << "so3 = " << so3.transpose() << endl;
// hat 为向量到反对称矩阵
cout << "so3 hat=\n" << Sophus::SO3d::hat(so3) << endl;
// 相对的,vee为反对称到向量
cout << "so3 hat vee= " << Sophus::SO3d::vee(Sophus::SO3d::hat(so3)).transpose() << endl;
// 增量扰动模型的更新
Vector3d update_so3(1e-4, 0, 0); //假设更新量为这么多
Sophus::SO3d SO3_updated = Sophus::SO3d::exp(update_so3) * SO3_R;
cout << "SO3 updated = \n" << SO3_updated.matrix() << endl;
cout << "*******************************" << endl;
// 对SE(3)操作大同小异
Vector3d t(1, 0, 0); // 沿X轴平移1
Sophus::SE3d SE3_Rt(R, t); // 从R,t构造SE(3)
Sophus::SE3d SE3_qt(q, t); // 从q,t构造SE(3)
cout << "SE3 from R,t= \n" << SE3_Rt.matrix() << endl;
cout << "SE3 from q,t= \n" << SE3_qt.matrix() << endl;
// 李代数se(3) 是一个六维向量,方便起见先typedef一下
typedef Eigen::Matrix<double, 6, 1> Vector6d;
Vector6d se3 = SE3_Rt.log();
cout << "se3 = " << se3.transpose() << endl;
// 观察输出,会发现在Sophus中,se(3)的平移在前,旋转在后.
// 同样的,有hat和vee两个算符
cout << "se3 hat = \n" << Sophus::SE3d::hat(se3) << endl;
cout << "se3 hat vee = " << Sophus::SE3d::vee(Sophus::SE3d::hat(se3)).transpose() << endl;
// 最后,演示一下更新
Vector6d update_se3; //更新量
update_se3.setZero();
update_se3(0, 0) = 1e-4;
Sophus::SE3d SE3_updated = Sophus::SE3d::exp(update_se3) * SE3_Rt;
cout << "SE3 updated = " << endl << SE3_updated.matrix() << endl;
return 0;
}
编译
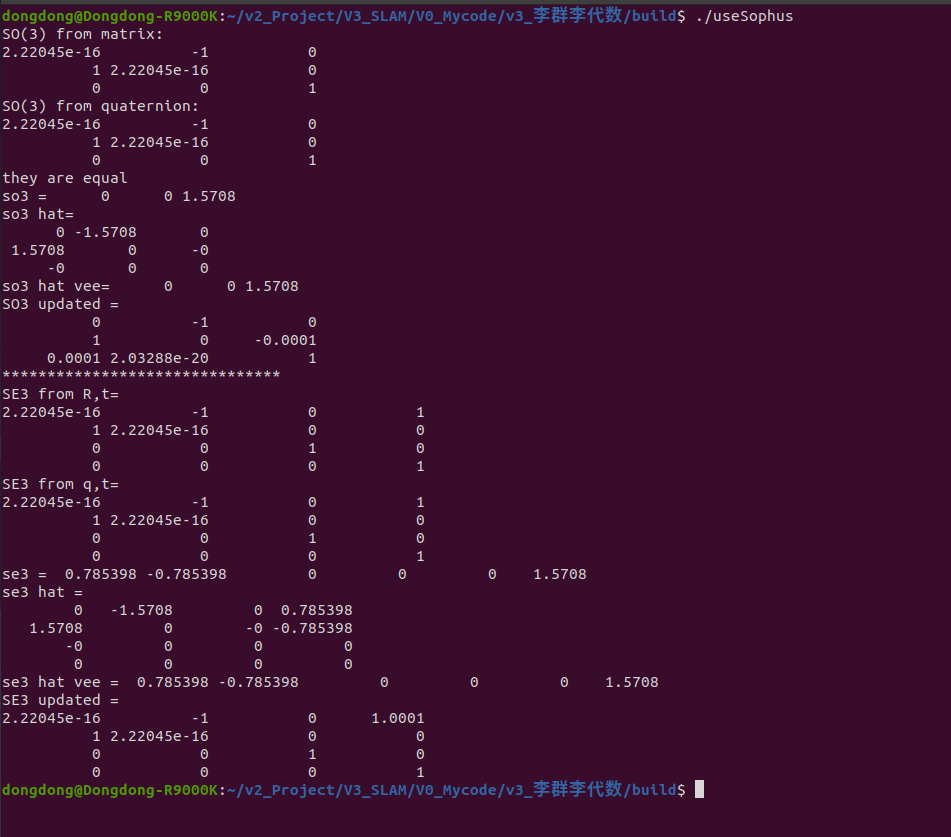
mkdir build cd build cmake .. make

运行结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号