

https://github.com/Celebrandil/CudaSift/blob/Pascal/CMakeLists.txt
cmake_minimum_required(VERSION 2.6)
project(cudaSift)
set(cudaSift_VERSION_MAJOR 2)
set(cudaSift_VERSION_MINOR 0)
set(cudaSift_VERSION_PATCH 0)
set(CPACK_PACKAGE_VERSION_MAJOR "${cudaSift_VERSION_MAJOR}")
set(CPACK_PACKAGE_VERSION_MINOR "${cudaSift_VERSION_MINOR}")
set(CPACK_PACKAGE_VERSION_PATCH "${cudaSift_VERSION_PATCH}")
set(CPACK_GENERATOR "ZIP")
include(CPack)
find_package(OpenCV REQUIRED)
find_package(CUDA)
if (NOT CUDA_FOUND)
message(STATUS "CUDA not found. Project will not be built.")
endif(NOT CUDA_FOUND)
if (WIN32)
set(EXTRA_CXX_FLAGS "/DVERBOSE /D_CRT_SECURE_NO_WARNINGS ")
list(APPEND CUDA_NVCC_FLAGS "-arch=sm_35;--compiler-options;-O2;-DVERBOSE")
endif()
if (UNIX)
if (APPLE)
set(EXTRA_CXX_FLAGS "-DVERBOSE -msse2")
list(APPEND CUDA_NVCC_FLAGS "-arch=sm_35;--compiler-options;-O2;-DVERBOSE")
else()
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -O2 -msse2 ")
list(APPEND CUDA_NVCC_FLAGS "-lineinfo;-ccbin;/usr/bin/gcc-6;--compiler-options;-O2;-D_FORCE_INLINES;-DVERBOSE_NOT")
endif()
endif()
set(cuda_sources
cudaImage.cu
cudaImage.h
cudaSiftH.cu
cudaSiftH.h
matching.cu
cudaSiftD.h
cudaSift.h
cudautils.h
)
set(sources
geomFuncs.cpp
mainSift.cpp
)
include_directories(
${CMAKE_CURRENT_SOURCE_DIR}
)
#SET(CUDA_SEPARABLE_COMPILATION ON)
cuda_add_executable(cudasift ${cuda_sources} ${sources} OPTIONS -arch=sm_35)
#cuda_add_executable(l2net l2netD.cu OPTIONS -arch=sm_35)
set_target_properties(cudasift PROPERTIES
COMPILE_FLAGS "${EXTRA_CXX_FLAGS}"
)
target_link_libraries(cudasift ${CUDA_cudadevrt_LIBRARY} ${OpenCV_LIBS})
# /usr/local/cuda/lib64/libcudadevrt.a ${OpenCV_LIBS}
#)
install(FILES
${cuda_sources}
${sources}
cudaSiftD.cu
CMakeLists.txt
Copyright.txt
DESTINATION .
)
install(FILES data/left.pgm data/righ.pgm
DESTINATION data
)
测试样例1 读取单路图像检测特征点
#include <iostream>
#include <cmath>
#include <dirent.h> // 循环访问文件夹路径使用
#include <iomanip>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "cudaImage.h"
#include "cudaSift.h"
using namespace std;
typedef struct {
float xpos;
float ypos;
float scale;
float sharpness;
float edgeness;
float orientation;
float score;
float ambiguity;
int match;
float match_xpos;
float match_ypos;
float match_error;
float subsampling;
float empty[3];
float data[128];
} SiftPoint_gpu;
typedef struct {
float xpos;
float ypos;
float scores;
float descriptors[128];
} SiftPoint_cpu;
//单路测试
void GetKeyPoint()
{
int devNum = 0, imgSet = 0;
//1读取图像
cv::Mat limg;
cv::imread("data/img1.png", 0).convertTo(limg, CV_32FC1);
unsigned int w = limg.cols;
unsigned int h = limg.rows;
std::cout << "Image size = (" << w << "," << h << ")" << std::endl;
//2 初始化cuda加速器
std::cout << "Initializing data..." << std::endl;
InitCuda(devNum);
//3 加载图像到cuda
CudaImage img1;
img1.Allocate(w, h, iAlignUp(w, 128), false, NULL, (float*)limg.data);
img1.Download();
// 4-1 初始化提取器
SiftData siftData1;
float initBlur = 1.0f;
float thresh = (imgSet ? 4.5f : 3.0f);
InitSiftData(siftData1, 32768, true, true);
// 4-2 初始化分配空间
float *memoryTmp = AllocSiftTempMemory(w, h, 5, false);
// 4-3 提取特征点
ExtractSift(siftData1, img1, 5, initBlur, thresh, 0.0f, false, memoryTmp);
int numPts = siftData1.numPts;//特征点总数目
SiftPoint *sift1 = siftData1.h_data;//特征点的数据
for (int j=0;j<numPts;j++)
{
float x=sift1[j].xpos;
float y=sift1[j].ypos;
float scores=sift1[j].score;
//float descriptors[128];
//sift1[j].data;
cout<< "(x,y) "<< x <<" " <<y<< "scores " <<scores <<endl;
}
// 4-4 释放特征点临时空间
FreeSiftTempMemory(memoryTmp);
// 5Free Sift data from device
FreeSiftData(siftData1);
}
int main()
{
GetKeyPoint();
}
样例2 读取多个文件夹循环访问
#include <iostream>
#include <cmath>
#include <dirent.h> //循环访问文件夹路径使用
#include <iomanip>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "cudaImage.h"
#include "cudaSift.h"
using namespace std;
typedef struct {
float xpos;
float ypos;
float scale;
float sharpness;
float edgeness;
float orientation;
float score;
float ambiguity;
int match;
float match_xpos;
float match_ypos;
float match_error;
float subsampling;
float empty[3];
float data[128];
} SiftPoint_gpu;
typedef struct {
float xpos;
float ypos;
float scores;
float descriptors[128];
} SiftPoint_cpu;
// 获取目录下所有图像名称
std::vector<std::string> getAllImagesPath(std::string img_dir)
{
std::vector<std::string> img_path_all;
// 读取文件夹下所有地图文件路径存储在 map_path_all数组中
DIR *pDir;
struct dirent *ptr;
if (!(pDir = opendir(img_dir.c_str())))
{
std::cout<<"Folder doesn't Exist!"<<std::endl;
}
while ((ptr = readdir(pDir)) != 0)
{
if (strcmp(ptr->d_name, ".") != 0 && strcmp(ptr->d_name, "..") != 0)
{
std::string path = img_dir + "/" + ptr->d_name;
img_path_all.push_back(path);
std::cout << "img_name:" << path << std::endl;
}
}
closedir(pDir);
return img_path_all;
}
//单路测试
void GetKeyPoint(vector<string> imgs_path )
{
int devNum = 0, imgSet = 0;
//1-1 初始化cuda加速器
std::cout << "Initializing data..." << std::endl;
InitCuda(devNum);
//1-2 初始化提取器
SiftData siftData1;
float initBlur = 1.0f;
float thresh = (imgSet ? 4.5f : 3.0f);
InitSiftData(siftData1, 32768, true, true);
//1-3 初始化分配空间
unsigned int w = 1920;
unsigned int h = 1080;
float *memoryTmp = AllocSiftTempMemory(w, h, 5, false);
cv::Mat limg;//创建空白图像
CudaImage img1;//创建空白cudA
int IMG_NUM=imgs_path.size();//记录大小
for( int i=0;i<IMG_NUM;i++){
//2-1 读取图像
cv::imread(imgs_path[i], 0).convertTo(limg, CV_32FC1);
//w = limg.cols;
//h = limg.rows;
//std::cout << "Image size = (" << w << "," << h << ")" << std::endl;
//2-2 加载图像到cuda
img1.Allocate(w, h, iAlignUp(w, 128), false, NULL, (float*)limg.data);
img1.Download();
// 2-3 提取特征点
ExtractSift(siftData1, img1, 5, initBlur, thresh, 0.0f, false, memoryTmp);
//2-4 访问所有特征点的属性
int numPts = siftData1.numPts;//特征点总数目
SiftPoint *sift1 = siftData1.h_data;//特征点的数据
//逐个特征点访问
for (int j=0;j<numPts;j++)
{
float x=sift1[j].xpos;
float y=sift1[j].ypos;
float scores=sift1[j].score;
//float descriptors[128];
//sift1[j].data;
cout<< "图像"<< imgs_path[i] << " (x,y) "<< x <<" " <<y<< "scores " <<scores <<endl;
}
//2-5 保存所有结果
}//for 读取图像
//3-1 释放特征点临时空间
FreeSiftTempMemory(memoryTmp);
//3-2Free Sift data from device
FreeSiftData(siftData1);
}
int main()
{
// 1.读取所有图像
vector<string> imgs_path = getAllImagesPath("./data");
//2 提取特征点
GetKeyPoint(imgs_path);
}
样例
1读取文件夹,提取每个特征点保存h5
2读取txt中两个图像匹配关系,特征点保存在h5
CMakeLists.txt
cmake_minimum_required(VERSION 3.10)
project(cudaSift)
#指定gcc和g++的版本为系统当前版本 工程默认6.0 现有系统7.5
set(CMAKE_C_COMPILER "/usr/bin/gcc")
set(CMAKE_CXX_COMPILER "/usr/bin/g++")
#设置cuda
set(cudaSift_VERSION_MAJOR 2)
set(cudaSift_VERSION_MINOR 0)
set(cudaSift_VERSION_PATCH 0)
#设置cpack
#CPack 是 CMake 2.4.2 之后的一个内置工具,用于创建软件的二进制包和源代码包。
set(CPACK_PACKAGE_VERSION_MAJOR "${cudaSift_VERSION_MAJOR}")
set(CPACK_PACKAGE_VERSION_MINOR "${cudaSift_VERSION_MINOR}")
set(CPACK_PACKAGE_VERSION_PATCH "${cudaSift_VERSION_PATCH}")
set(CPACK_GENERATOR "ZIP")
include(CPack)
#hdf5
find_package(HDF5 COMPONENTS C CXX HL REQUIRED)
link_directories( ${HDF5_LIBRARY_DIRS} )
include_directories( ${HDF5_INCLUDE_DIRS} )
find_package(OpenCV REQUIRED)
find_package(CUDA)
if (NOT CUDA_FOUND)
message(STATUS "CUDA not found. Project will not be built.")
endif(NOT CUDA_FOUND)
if (WIN32)
set(EXTRA_CXX_FLAGS "/DVERBOSE /D_CRT_SECURE_NO_WARNINGS ")
list(APPEND CUDA_NVCC_FLAGS "-arch=sm_35;--compiler-options;-O2;-DVERBOSE")
endif()
if (UNIX)
if (APPLE)
set(EXTRA_CXX_FLAGS "-DVERBOSE -msse2")
list(APPEND CUDA_NVCC_FLAGS "-arch=sm_35;--compiler-options;-O2;-DVERBOSE")
else()
#CMAKE_CXX_FLAGS 是CMake传给C++编译器的编译选项,通过设置这个值就好比 g++ -std=c++11 -g -Wall
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -O2 -msse2 ") # # release包优化
list(APPEND CUDA_NVCC_FLAGS "-lineinfo;-ccbin;/usr/bin/gcc-6;--compiler-options;-O2;-D_FORCE_INLINES;-DVERBOSE_NOT")
endif()
endif()
#把当前目录(CMakeLists.txt所在目录)下的include文件夹加入到包含路径
include_directories(
${CMAKE_CURRENT_SOURCE_DIR}
)
#cuda_sources 指代文件目录
set(cuda_sources
cudaImage.cu
cudaImage.h
cudaSiftH.cu
cudaSiftH.h
matching.cu
cudaSiftD.h
cudaSift.h
cudautils.h
)
#sources 指代 文件目录
set(sources
geomFuncs.cpp
v4_mainSift_h5_match.cpp
)
#SET(CUDA_SEPARABLE_COMPILATION ON)
cuda_add_executable(cudasift ${cuda_sources} ${sources} OPTIONS -arch=sm_35)
#cuda_add_executable(l2net l2netD.cu OPTIONS -arch=sm_35)
set_target_properties(cudasift PROPERTIES COMPILE_FLAGS "${EXTRA_CXX_FLAGS}")
#告诉CMake我要链接哪个库文件
target_link_libraries(cudasift ${CUDA_cudadevrt_LIBRARY} ${OpenCV_LIBS} ${HDF5_CXX_LIBRARIES} )
# /usr/local/cuda/lib64/libcudadevrt.a ${OpenCV_LIBS}
#)
install(FILES
${cuda_sources}
${sources}
cudaSiftD.cu
CMakeLists.txt
Copyright.txt
DESTINATION .
)
install(FILES data/left.pgm data/righ.pgm
DESTINATION data
)
v4_mainSift_h5_match.cpp
关键
float thresh = (imgSet ? 4.5f : 3.0f);
InitSiftData(siftData1, 4096, true, true); //
#include <iostream>
#include <cmath>
#include <dirent.h> //循环访问文件夹路径使用
#include <iomanip>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "cudaImage.h"
#include "cudaSift.h"
#include "hdf5.h"
#include <fstream>
int ImproveHomography(SiftData &data, float *homography, int numLoops, float minScore, float maxAmbiguity, float thresh);
void PrintMatchData(SiftData &siftData1, SiftData &siftData2, CudaImage &img);
void MatchAll(SiftData &siftData1, SiftData &siftData2, float *homography);
double ScaleUp(CudaImage &res, CudaImage &src);
using namespace std;
typedef struct {
float xpos;
float ypos;
float scale;
float sharpness;
float edgeness;
float orientation;
float score;
float ambiguity;
int match;
float match_xpos;
float match_ypos;
float match_error;
float subsampling;
float empty[3];
float data[128];
} SiftPoint_gpu;
typedef struct {
float xpos;
float ypos;
float scores;
float descriptors[128];
} SiftPoint_cpu;
// 获取目录下所有图像名称
std::vector<std::string> getAllImagesPath(std::string img_dir)
{
std::vector<std::string> img_path_all;
// 读取文件夹下所有地图文件路径存储在 map_path_all数组中
DIR *pDir;
struct dirent *ptr;
if (!(pDir = opendir(img_dir.c_str())))
{
std::cout<<"Folder doesn't Exist!"<<std::endl;
}
while ((ptr = readdir(pDir)) != 0)
{
if (strcmp(ptr->d_name, ".") != 0 && strcmp(ptr->d_name, "..") != 0)
{
std::string path = img_dir + "/" + ptr->d_name;
img_path_all.push_back(path);
std::cout << "img_name:" << path << std::endl;
}
}
closedir(pDir);
return img_path_all;
}
//特征点提取保存的名字
#define FILE "CudaSiftPoint.h5"
//特征点关系保存保存名字
#define FILE_Match "CudaSiftMatch.h5"
//单个文件夹循环读取图片提取特征点保存
void GetKeyPoint(vector<string> imgs_path )
{
int devNum = 0, imgSet = 1;
//1-1 初始化cuda加速器
std::cout << "Initializing data..." << std::endl;
InitCuda(devNum);
//1-2 初始化提取器
SiftData siftData1;
float initBlur = 1.0f;
float thresh = (imgSet ? 4.5f : 3.0f);
InitSiftData(siftData1, 32768, true, true); //
//1-3 初始化分配空间
unsigned int w = 1920;
unsigned int h = 1080;
float *memoryTmp = AllocSiftTempMemory(w, h, 5, false);
cv::Mat limg;//创建空白图像
CudaImage img1;//创建空白cudA
int IMG_NUM=imgs_path.size();//记录大小
// 3.存成h5文件
hid_t file;
herr_t status;
// 创建h5 file
file = H5Fcreate(FILE,H5F_ACC_TRUNC, H5P_DEFAULT, H5P_DEFAULT);
hid_t group;
hid_t space_kpt, space_dec, space_size, space_score;
hid_t dset_kpt, dset_dec, dest_size, dest_score;
for( int i=0;i<IMG_NUM;i++){
//2-1 读取图像
cv::imread(imgs_path[i], 0).convertTo(limg, CV_32FC1);
//w = limg.cols;
//h = limg.rows;
//std::cout << "Image size = (" << w << "," << h << ")" << std::endl;
//2-2 加载图像到cuda
if(i==0){
img1.Allocate(w, h, iAlignUp(w, 128), false, NULL, (float*)limg.data);
}
img1.Download();
// 2-3 提取特征点
ExtractSift(siftData1, img1, 5, initBlur, thresh, 0.0f, false, memoryTmp);
//2-4 访问所有特征点的属性
int numPts = siftData1.numPts;//特征点总数目
SiftPoint *sift1 = siftData1.h_data;//特征点的数据
// 构建group
int p = imgs_path[i].find_last_of("/");
std::string g_name = imgs_path[i].substr(p+1);
// std::cout<<g_name<<std::endl;
group = H5Gcreate(file, g_name.c_str(), H5P_DEFAULT, H5P_DEFAULT, H5P_DEFAULT);
float kpt_pos[numPts*2];//特征点列表
float score[numPts];//得分列表
float descriptors[128][numPts];//numPts个描述子 每个128维度 h5是竖着存储的
int img_size[2] = {w,h};
//逐个特征点访问
for (int j=0;j<numPts;j++)
{
kpt_pos[2 * j] = sift1[j].xpos;
kpt_pos[2 * j + 1] = sift1[j].ypos;
score[j]=sift1[j].score;
for (int i =0;i<128;i++){
descriptors[i][j]=sift1[j].data[i];
}
// cout<< "图像"<< imgs_path[i] << " (x,y) "<< x <<" " <<y<< "scores " <<scores <<endl;
}
// 1.特征点
// 设置数据空间
hsize_t dims_kpt[2] = {numPts, 2}; // n行2列
space_kpt = H5Screate_simple(2, dims_kpt, NULL);
// 构建dataset
dset_kpt = H5Dcreate(group, "keypoints", H5T_IEEE_F32LE, space_kpt, H5P_DEFAULT,
H5P_DEFAULT, H5P_DEFAULT);
// 写入数据到dataset
status = H5Dwrite(dset_kpt, H5T_NATIVE_FLOAT, H5S_ALL, H5S_ALL, H5P_DEFAULT,
kpt_pos);
// 2.描述子
// hsize_t dims_dec[2] = {descriptors_vec[i].rows, descriptors_vec[i].cols}; // 行列
hsize_t dims_dec[2] = {128,numPts}; // 128行 1列
space_dec = H5Screate_simple(2, dims_dec, NULL);
dset_dec = H5Dcreate(group, "descriptors", H5T_IEEE_F32LE, space_dec, H5P_DEFAULT,
H5P_DEFAULT, H5P_DEFAULT);
status = H5Dwrite(dset_dec, H5T_NATIVE_FLOAT, H5S_ALL, H5S_ALL, H5P_DEFAULT,
descriptors);
// 3.特征点分数
hsize_t dims_score[1] = {numPts}; // n行1列
space_score = H5Screate_simple(1, dims_score, NULL);
// 构建dataset
dest_score = H5Dcreate(group, "scores", H5T_IEEE_F32LE, space_score, H5P_DEFAULT,
H5P_DEFAULT, H5P_DEFAULT);
status = H5Dwrite(dest_score, H5T_NATIVE_FLOAT, H5S_ALL, H5S_ALL, H5P_DEFAULT,
score);
// 4.图像大小
hsize_t dims_size[1] = {2}; //
space_size = H5Screate_simple(1, dims_size, NULL);
// 构建dataset
// 注意这里不能BE 需要是LE 涉及到字节存储顺序big-endian
// https://stackoverflow.com/questions/59247385/why-does-torch-from-numpy-require-a-different-byte-ordering-while-matplotlib-doe
// https://www.cnblogs.com/still-smile/p/11595775.html
dest_size = H5Dcreate(group, "image_size", H5T_STD_I64LE, space_size, H5P_DEFAULT,
H5P_DEFAULT, H5P_DEFAULT);
status = H5Dwrite(dest_size, H5T_NATIVE_INT, H5S_ALL, H5S_ALL, H5P_DEFAULT,
img_size);
}//for 读取图像
//3-1 释放特征点临时空间
FreeSiftTempMemory(memoryTmp);
//3-2Free Sift data from device
FreeSiftData(siftData1);
//4
// 关闭句柄
status = H5Dclose(dset_kpt);
status = H5Sclose(space_kpt);
status = H5Dclose(dset_dec);
status = H5Sclose(space_dec);
status = H5Dclose(dest_score);
status = H5Sclose(space_score);
status = H5Dclose(dest_size);
status = H5Sclose(space_size);
status = H5Gclose(group);
status = H5Fclose(file);
}
//-------------------------------------------------------------------------
//读取colmap生成的匹配txt,生成cudasift对应的h5文件
int beginnum=200;
int endnum=600; //2260
// 0-200 85-77
//200-400
bool issaveh5=1;//是否保存h5
//输入文件路径txt
void cudasift_matchImg( string txtpath)
{
//初始化
int devNum = 0, imgSet = 1;
unsigned int w = 1920;
unsigned int h = 1080;
InitCuda(devNum);
CudaImage img1, img2;
cv::Mat limg, rimg;
float initBlur = 1.0f;
float thresh = (imgSet ? 4.5f : 3.0f);//阈值 4.5f -3000多个 3.0f - 10000多个
//特点点初始化
SiftData siftData1, siftData2;
InitSiftData(siftData1, 32768, true, true);
InitSiftData(siftData2, 32768, true, true);
float *memoryTmp = AllocSiftTempMemory(w, h, 5, false);
/*
//循环读取
// 1 读取txt 逐行读取 空格分割 获取结果两个图像名字
*/
ifstream in(txtpath);
string line;
vector< vector<string> > strALL_split;
while (getline(in, line))
{//将in文件中的每一行字符读入到string line中
cout<< line <<endl;
stringstream ss(line);//使用string初始化stringstream
string tmp_str;
vector<string> str_split;
while(getline(ss,tmp_str,' ')){
str_split.push_back(tmp_str);
}
strALL_split.push_back(str_split);
}
// 3.存成h5文
herr_t status;
//char FILE_Match[]="feats-superpoint-n4096-r1024_matches-NN-mutual_pairs-db-covis20.h5";
// 创建h5 file
hid_t file;
hid_t group ;
hid_t dest_matchid,dest_matchiderror;
if(issaveh5){file = H5Fcreate(FILE_Match,H5F_ACC_TRUNC, H5P_DEFAULT, H5P_DEFAULT);}
//int ci=beginnum-1;
//-----------------------------------循环开始提取--------------------------------------
//if(strALL_split.size()<=endnum){endnum=strALL_split.size();}
for (int i=0;i<strALL_split.size();i++){
cout <<"次数"<< i << "/"<< strALL_split.size()<<" 图像1 "<<strALL_split[i][0] << "\t 图像2 "<< strALL_split[i][1]<<endl;
string img1name="data/imgs/"+strALL_split[i][0];
string img2name="data/imgs/"+strALL_split[i][1];
// 1 读取图像
cv::imread(img1name, 0).convertTo(limg, CV_32FC1);
cv::imread(img2name, 0).convertTo(rimg, CV_32FC1);
//2载入cuda内存
if(i==0){//只能执行一次 初始化分配 且图像格式是CV_32FC1
img1.Allocate(w, h, iAlignUp(w, 128), false, NULL, (float*)limg.data);
img2.Allocate(w, h, iAlignUp(w, 128), false, NULL, (float*)rimg.data);
}
img1.Download();
img2.Download();
//3特征点提取
ExtractSift(siftData1, img1, 5, initBlur, thresh, 0.0f, false, memoryTmp);
ExtractSift(siftData2, img2, 5, initBlur, thresh, 0.0f, false, memoryTmp);
//4匹配
MatchSiftData(siftData1, siftData2);
float homography[9];
int numMatches;
FindHomography(siftData1, homography, &numMatches, 10000, 0.00f, 0.80f, 5.0);
int numFit = ImproveHomography(siftData1, homography, 5, 0.00f, 0.80f, 3.0);
//2-4 访问所有特征点的属性
int numPts = siftData1.numPts;//特征点总数目
SiftPoint *sift1 = siftData1.h_data;//特征点的数据
// float kpt_pos[numPts*2];//特征点列表
//float score[numPts];//得分列表
// float descriptors[128][numPts];//numPts个描述子 每个128维度 h5是竖着存储的
//int img_size[2] = {w,h};
float matchid[numPts];
float match_scores[numPts];
float minScore= 0.00f;
float maxAmbiguity= 0.80f;
float thresh=3.0;
float limit = thresh*thresh;
int no_num=0;
//逐个特征点访问
for (int j=0;j<numPts;j++)
{
// if (sift1[j].score<minScore || sift1[j].ambiguity>maxAmbiguity)
if(sift1[j].match_error>=limit) //剔除匹配不好的点
{
no_num=no_num+1;
matchid[j]=-1; //匹配为-1
}
else
{
matchid[j]=sift1[j].match; //正常的匹配点
}
match_scores[j]=sift1[j].match_error;
}
cout<<" 特征点总数 "<<numPts<< " 剔除的特征点 " << no_num<<endl;
//保存h5
if(issaveh5){
//创建group
std::string g_name = strALL_split[i][0]+"_"+strALL_split[i][1];
group = H5Gcreate(file, g_name.c_str(), H5P_DEFAULT, H5P_DEFAULT, H5P_DEFAULT);
if (numPts==0){continue;}
//创建数据格式
hsize_t dims_matchid[1] = {numPts}; // n行1列
hid_t space_matchid = H5Screate_simple(1, dims_matchid, NULL);
//保存matches0数据 int16 H5T_STD_I64LE H5T_STD_I16LE--float
dest_matchid = H5Dcreate(group, "matches0", H5T_STD_I16LE, space_matchid, H5P_DEFAULT,
H5P_DEFAULT, H5P_DEFAULT);
status = H5Dwrite(dest_matchid, H5T_NATIVE_FLOAT, H5S_ALL, H5S_ALL, H5P_DEFAULT,matchid);
//保存matching_scores0数据 float32
hsize_t dims_matchiderror[1] = {numPts}; // n行1列
hid_t space_matchiderror = H5Screate_simple(1, dims_matchiderror, NULL);
dest_matchiderror = H5Dcreate(group, "matching_scores0", H5T_IEEE_F32LE, space_matchiderror, H5P_DEFAULT,
H5P_DEFAULT, H5P_DEFAULT);
status = H5Dwrite(dest_matchiderror, H5T_NATIVE_FLOAT, H5S_ALL, H5S_ALL, H5P_DEFAULT,match_scores);
}
}//txt循环每一行图像路径
if(issaveh5){
status = H5Dclose(dest_matchid);
status = H5Dclose(dest_matchiderror);
status = H5Dclose(group);
status = H5Dclose(file);
}
FreeSiftTempMemory(memoryTmp);
FreeSiftData(siftData1);
FreeSiftData(siftData2);
}
int main()
{
// 1.读取文件夹下所有图像
string imgspath="./data/imgs";
vector<string> imgs_path = getAllImagesPath(imgspath);
//2 提取特征点,没有筛选 ,并保存h5, 没有匹配
GetKeyPoint(imgs_path);
//3提取特征点,匹配关系保存h5,从txt获取每行要对比的图像名字
//string txtpath="data/pairs-db-covis20.txt";
//cudasift_matchImg(txtpath);
}
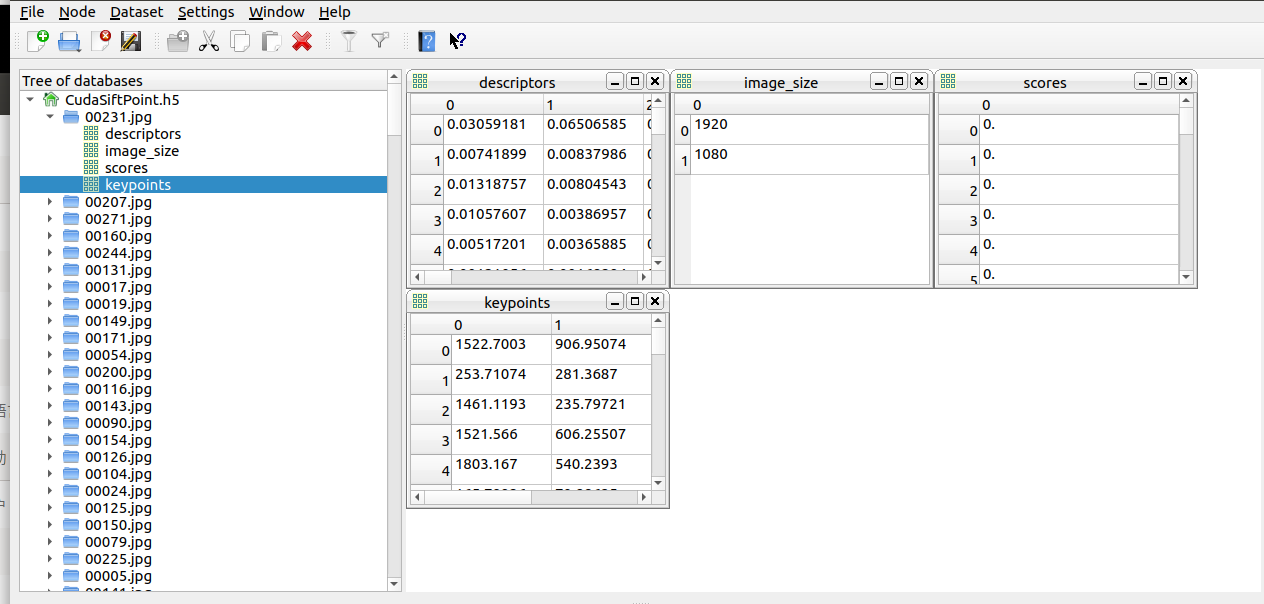
cmd中输入命令:vitables来打开ViTables,从而在可视化界面里来进行相应操作。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号