

eigen3安装
老版本
安装 命令下载的是3.2版本的eigen 从而无法与模板类的sophus相匹配
sudo apt-get install libeigen3-dev
额外说明:
一个库由头文件和库文件组成。Eigen头文件的默认位置在 “usr/include/eigen3” 中。如果不确定,可以输入以下命令查找:
sudo updatedb
locate eigen3
新版本
(0) 卸载老版本年
sudo rm -rf /usr/include/eigen3 /usr/lib/cmake/eigen3 /usr/share/doc/libeigen3-dev /usr/share/pkgconfig/eigen3.pc /var/lib/dpkg/info/libeigen3-dev.list /var/lib/dpkg/info/libeigen3-dev.md5sums
(1)在官网(http://eigen.tuxfamily.org/index.php?title=Main_Page)下载安装包:eigen-3.3.7.tar.bz2 ,然后提取到此处
(2)进入文件夹eigen-3.3.7,右键在终端打开。
(3)进行安装
mkdir build
cd build
cmake ..
sudo make install
Eigen头文件的默认位置在 “/usr/local/include/eigen3”
指定路径
cd eigen-3.3.7
mkdir -p build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
..
make -j4
make install
eigen3引用

CMakeLists.txt
# cmake needs this line
cmake_minimum_required(VERSION 3.1)
# Define project name
project(Eigen3_example_project)
find_package(Eigen3 REQUIRED)
#include_directories(${EIGEN3_INCLUDE_DIRS})
include_directories("/usr/local/include/eigen3") #自己编译的库
# Declare the executable target built from your sources
add_executable(Eigen3_example example.cpp)
# Eigen3就是一堆头文件没有连接库
#target_link_libraries(Eigen3_example PRIVATE ${OpenCV_LIBS})
第二种方式
CMakeLists.txt
cmake_minimum_required(VERSION 3.1)
project(untitled2)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_BUILD_TYPE Release)
set(ALL_TARGET_LIBRARIES "")
include(cmake/FindG2O.cmake)
#方式1
# find_package(Eigen3 REQUIRED)
# include_directories("/usr/local/include/eigen3")
#方式2
include(cmake/FindEigen3.cmake)
add_executable(fit_curve fit_curve.cpp)
target_link_libraries(fit_curve ${ALL_TARGET_LIBRARIES})
或者 导入安装包的位置文件

FindEigen3.cmake
# - Try to find Eigen3 lib
#
# This module supports requiring a minimum version, e.g. you can do
# find_package(Eigen3 3.1.2)
# to require version 3.1.2 or newer of Eigen3.
#
# Once done this will define
#
# EIGEN3_FOUND - system has eigen lib with correct version
# EIGEN3_INCLUDE_DIR - the eigen include directory
# EIGEN3_VERSION - eigen version
# Copyright (c) 2006, 2007 Montel Laurent, <montel@kde.org>
# Copyright (c) 2008, 2009 Gael Guennebaud, <g.gael@free.fr>
# Copyright (c) 2009 Benoit Jacob <jacob.benoit.1@gmail.com>
# Redistribution and use is allowed according to the terms of the 2-clause BSD license.
if(NOT Eigen3_FIND_VERSION)
if(NOT Eigen3_FIND_VERSION_MAJOR)
set(Eigen3_FIND_VERSION_MAJOR 2)
endif(NOT Eigen3_FIND_VERSION_MAJOR)
if(NOT Eigen3_FIND_VERSION_MINOR)
set(Eigen3_FIND_VERSION_MINOR 91)
endif(NOT Eigen3_FIND_VERSION_MINOR)
if(NOT Eigen3_FIND_VERSION_PATCH)
set(Eigen3_FIND_VERSION_PATCH 0)
endif(NOT Eigen3_FIND_VERSION_PATCH)
set(Eigen3_FIND_VERSION "${Eigen3_FIND_VERSION_MAJOR}.${Eigen3_FIND_VERSION_MINOR}.${Eigen3_FIND_VERSION_PATCH}")
endif(NOT Eigen3_FIND_VERSION)
macro(_eigen3_check_version)
file(READ "${EIGEN3_INCLUDE_DIR}/Eigen/src/Core/util/Macros.h" _eigen3_version_header)
string(REGEX MATCH "define[ \t]+EIGEN_WORLD_VERSION[ \t]+([0-9]+)" _eigen3_world_version_match "${_eigen3_version_header}")
set(EIGEN3_WORLD_VERSION "${CMAKE_MATCH_1}")
string(REGEX MATCH "define[ \t]+EIGEN_MAJOR_VERSION[ \t]+([0-9]+)" _eigen3_major_version_match "${_eigen3_version_header}")
set(EIGEN3_MAJOR_VERSION "${CMAKE_MATCH_1}")
string(REGEX MATCH "define[ \t]+EIGEN_MINOR_VERSION[ \t]+([0-9]+)" _eigen3_minor_version_match "${_eigen3_version_header}")
set(EIGEN3_MINOR_VERSION "${CMAKE_MATCH_1}")
set(EIGEN3_VERSION ${EIGEN3_WORLD_VERSION}.${EIGEN3_MAJOR_VERSION}.${EIGEN3_MINOR_VERSION})
if(${EIGEN3_VERSION} VERSION_LESS ${Eigen3_FIND_VERSION})
set(EIGEN3_VERSION_OK FALSE)
else(${EIGEN3_VERSION} VERSION_LESS ${Eigen3_FIND_VERSION})
set(EIGEN3_VERSION_OK TRUE)
endif(${EIGEN3_VERSION} VERSION_LESS ${Eigen3_FIND_VERSION})
if(NOT EIGEN3_VERSION_OK)
message(STATUS "Eigen3 version ${EIGEN3_VERSION} found in ${EIGEN3_INCLUDE_DIR}, "
"but at least version ${Eigen3_FIND_VERSION} is required")
endif(NOT EIGEN3_VERSION_OK)
endmacro(_eigen3_check_version)
if (EIGEN3_INCLUDE_DIR)
# in cache already
_eigen3_check_version()
set(EIGEN3_FOUND ${EIGEN3_VERSION_OK})
else (EIGEN3_INCLUDE_DIR)
# specific additional paths for some OS
if (WIN32)
set(EIGEN_ADDITIONAL_SEARCH_PATHS ${EIGEN_ADDITIONAL_SEARCH_PATHS} "C:/Program Files/Eigen/include" "C:/Program Files (x86)/Eigen/include")
endif(WIN32)
find_path(EIGEN3_INCLUDE_DIR NAMES signature_of_eigen3_matrix_library
PATHS
include
${EIGEN_ADDITIONAL_SEARCH_PATHS}
${KDE4_INCLUDE_DIR}
PATH_SUFFIXES eigen3 eigen
)
if(EIGEN3_INCLUDE_DIR)
_eigen3_check_version()
endif(EIGEN3_INCLUDE_DIR)
include(FindPackageHandleStandardArgs)
find_package_handle_standard_args(Eigen3 DEFAULT_MSG EIGEN3_INCLUDE_DIR EIGEN3_VERSION_OK)
mark_as_advanced(EIGEN3_INCLUDE_DIR)
endif(EIGEN3_INCLUDE_DIR)
include_directories(SYSTEM ${EIGEN3_INCLUDE_DIR})
#编译过程
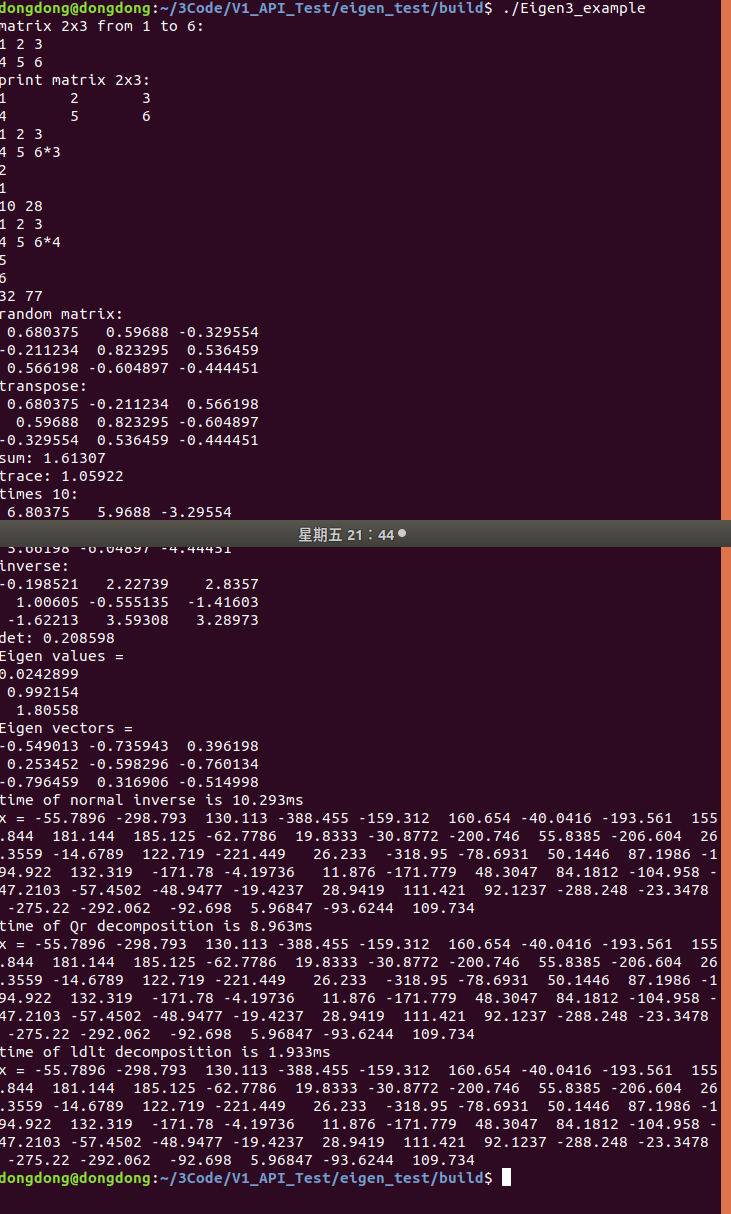
mkdir build cd build cmake .. make ./Eigen3_example

工程代码
测试例子1 基本矩阵创建和求解
example.cpp
#include <iostream>
using namespace std;
#include <ctime>
// Eigen 核心部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
//#include <Eigen/Eigen>
using namespace Eigen;
int main(){
// 1声明一个2*3的float矩阵
Matrix<float, 2, 3> matrix_23;
// 2-1输入数据(初始化)
matrix_23 << 1, 2, 3, 4, 5, 6;
// 输出
cout << "matrix 2x3 from 1 to 6: \n" << matrix_23 << endl;
// 2-3用()访问矩阵中的元素
cout << "print matrix 2x3: " << endl;
for (int i = 0; i < 2; i++) {
for (int j = 0; j < 3; j++) cout << matrix_23(i, j) << "\t";
cout << endl;
}
// 2-4-1矩阵相乘
// 定义矩阵 3*1
Matrix<float, 3, 1> vd_3d;
vd_3d << 3, 2, 1;//赋值
//数据类型转换后相乘
Matrix<float, 2, 1> result = matrix_23 * vd_3d;
cout << matrix_23 << "*"<< vd_3d<<'\n' << result.transpose() << endl;
// 2-4-2矩阵相乘
//定义矩阵 3*1
Vector3d v_3d;// Matrix<double, 3, 1> vd_3d;
v_3d << 4, 5, 6;//赋值
//直接相乘不用户数据转换
Matrix<double, 2, 1> result2 = matrix_23.cast<double>() * v_3d;
cout << matrix_23 << "*"<< v_3d <<'\n' <<result2.transpose() << endl;
// 3 一些矩阵运算
// 四则运算就不演示了,直接用+-*/即可。
Matrix3d matrix_33 = Matrix3d::Random(); // 随机数矩阵 Matrix<double, 3, 3> vd_3d;
cout << "random matrix: \n" << matrix_33 << endl;
cout << "transpose: \n" << matrix_33.transpose() << endl; // 转置
cout << "sum: " << matrix_33.sum() << endl; // 各元素和
cout << "trace: " << matrix_33.trace() << endl; // 迹
cout << "times 10: \n" << 10 * matrix_33 << endl; // 数乘
cout << "inverse: \n" << matrix_33.inverse() << endl; // 逆
cout << "det: " << matrix_33.determinant() << endl; // 行列式
// 4 特征值
// 实对称矩阵可以保证对角化成功
SelfAdjointEigenSolver<Matrix3d> eigen_solver(matrix_33.transpose() * matrix_33); //转置*本身
cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;
const int MATRIX_SIZE=50;
// 5解方程
// 我们求解 matrix_NN * x = v_Nd 这个方程 求解x
// N的大小在前边的宏里定义,它由随机数生成
// 直接求逆自然是最直接的,但是求逆运算量大
Matrix<double, MATRIX_SIZE, MATRIX_SIZE> matrix_NN = MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定
Matrix<double, MATRIX_SIZE, 1> v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);
clock_t time_stt = clock(); // 计时
// 方法1 直接求逆
Matrix<double, MATRIX_SIZE, 1> x = matrix_NN.inverse() * v_Nd;//.inverse() 逆
cout << "time of normal inverse is "<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;//输出时间 8.408ms
cout << "x = " << x.transpose() << endl;
// 方法2 通常用矩阵分解来求,例如QR分解,速度会快很多
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout << "time of Qr decomposition is "<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;//输出时间 8.849ms
cout << "x = " << x.transpose() << endl;
// 方法3 对于正定矩阵,还可以用cholesky分解来解方程
time_stt = clock();
x = matrix_NN.ldlt().solve(v_Nd);
cout << "time of ldlt decomposition is " << 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl; // 2.747ms
cout << "x = " << x.transpose() << endl;
return 0;
}
测试例子2
矩阵运算,欧拉角,旋转向量,旋转矩阵,坐标运算
#include <iostream>
#include <cmath>
using namespace std;
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace Eigen;
// 本程序演示了 Eigen 几何模块的使用方法
int main(int argc, char **argv) {
// 0Eigen/Geometry 模块提供了各种旋转和平移的表示
// 1-1 创建3D 旋转矩阵3*3
Matrix3d rotation_matrix = Matrix3d::Identity();//直接使用 Matrix3d 或 Matrix3f
// 1-2 创建旋转向量3*1
// 使用 AngleAxis, 它底层不直接是Matrix,但运算可以当作矩阵(因为重载了运算符)
AngleAxisd rotation_vector(M_PI / 4, Vector3d(0, 0, 1)); //沿 Z 轴旋转 45 度
cout.precision(3);
cout << "rotation matrix =\n" << rotation_vector.matrix() << endl; //用matrix()转换成矩阵
// 2-1 旋转向量 变换 旋转矩阵
rotation_matrix = rotation_vector.toRotationMatrix();//3*3
// 2-2 旋转矩阵 转换 欧拉角
Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX顺序,即roll pitch yaw顺序
cout << "yaw pitch roll = " << euler_angles.transpose() << endl; //
// 3-1 坐标变换 旋转向量 rotation_vector * //欧拉角V
Vector3d v(1, 0, 0);//欧拉角
Vector3d v_rotated = rotation_vector * v;//
cout << "(1,0,0) after rotation (by angle axis) = " << v_rotated.transpose() << endl;
// 3-2 坐标变换 旋转矩阵 rotation_vector * //欧拉角V
v_rotated = rotation_matrix * v;
cout << "(1,0,0) after rotation (by matrix) = " << v_rotated.transpose() << endl;
// 2-3创建 欧氏变换矩阵 使用 Eigen::Isometry
Isometry3d T = Isometry3d::Identity(); // 虽然称为3d,实质上是4*4的矩阵
T.rotate(rotation_vector); // 按照rotation_vector进行旋转 旋转向量 rotation_vector
T.pretranslate(Vector3d(1, 3, 4)); // 把平移向量设成(1,3,4)
cout << "Transform matrix = \n" << T.matrix() << endl;
/*
0.707 -0.707 0 1
0.707 0.707 0 3
0 0 1 4
0 0 0 1
*/
// 3-3 用变换矩阵进行坐标变换
Vector3d v_transformed = T * v; // 相当于R*v+t
cout << "v tranformed = " << v_transformed.transpose() << endl;
//v tranformed = 1.71 3.71 4
// 对于仿射和射影变换,使用 Eigen::Affine3d 和 Eigen::Projective3d 即可,略
// 2-4 旋转向量3*1 创建 四元数
// 可以直接把AngleAxis赋值给四元数,反之亦然
Quaterniond q = Quaterniond(rotation_vector); //旋转向量 rotation_vector
cout << "quaternion from rotation vector = " << q.coeffs().transpose() << endl; // 请注意coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部
//quaternion from rotation vector = 0 0 0.383 0.924
// 2-5 旋转矩阵3*3 创建 四元数
q = Quaterniond(rotation_matrix);
cout << "quaternion from rotation matrix = " << q.coeffs().transpose() << endl;
//quaternion from rotation matrix = 0 0 0.383 0.924
// 3-4 使用四元数旋转一个向量,使用重载的乘法即可
v_rotated = q * v; // 注意数学上是qvq^{-1}
cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl;
// 3-5 使用四元数旋转一个向量.用常规向量乘法表示,则应该如下计算
/*
向量 px=Quaterniond(0, 1, 0, 0) -> 空间三维点(x,y,z)=(1,0,0)
四元数输入 qx
四元数结果 qy
计算公式 py= q*px*(q^-1)
四元数结果转化为旋转矩阵
.coeffs().transpose()
*/
cout << "should be equal to " << (q * Quaterniond(0, 1, 0, 0) * q.inverse()).coeffs().transpose() << endl;
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号