
Flash Attention是怎么做到又快又省显存的?
转自:https://zhuanlan.zhihu.com/p/721973285
Flash Attention 并没有减少 Attention 的计算量,也不影响精度,但是却比标准的Attention运算快 2~4 倍的运行速度,减少了 5~20 倍的内存使用量。究竟是怎么实现的呢?
Attention 为什么慢?
此处的“快慢”是相对而言的。严格意义上来说,相比于传统的 RNN,Transformer中的Attention可以并行地处理序列所有位置的信息(RNN 只能串行处理),因此计算效率并不低,但是仍然有可以进一步改进的空间。
众所周知,科学计算通常分为计算密集型 (compute-bound) 和内存密集型 (memory-bound) 两类。其中,计算密集型运算的时间瓶颈主要在于算数计算,比如大型矩阵的相乘等,而内存密集型运算的时间瓶颈主要在于内存的读写时间,比如批归一化、层归一化等等。
为了对 Attention 的内存读取时间有更清晰的感知,这里简单介绍 GPU 的内存层级。
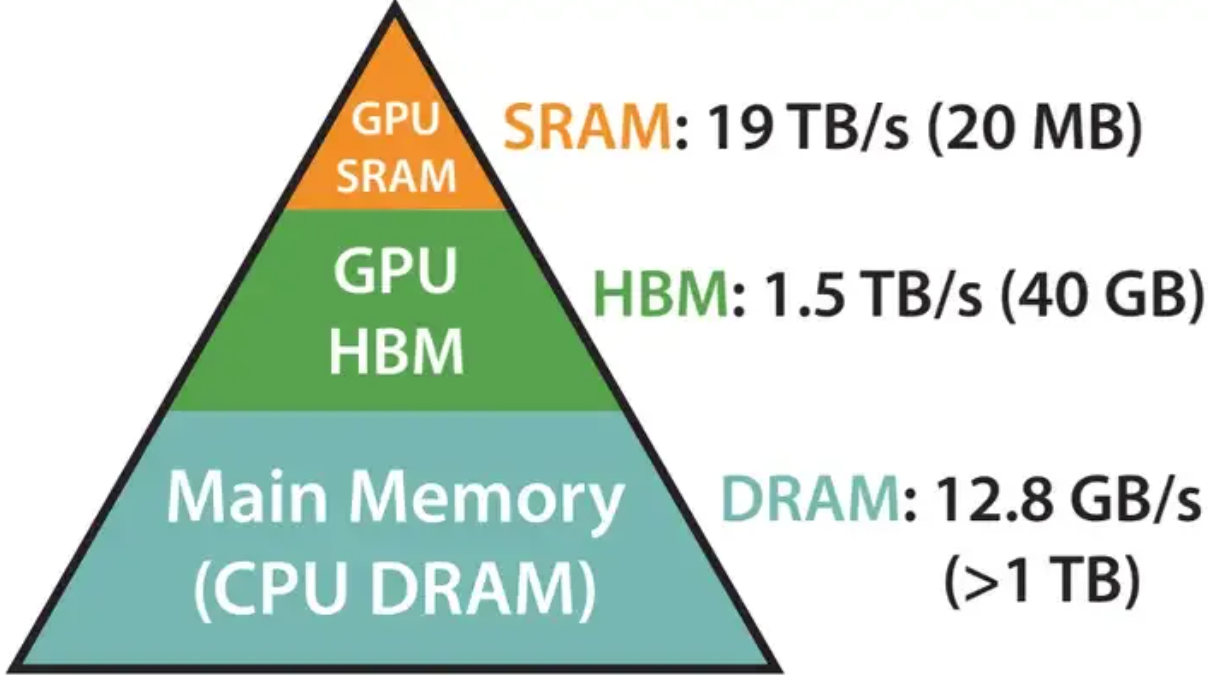
GPU 的内存可以分为 HBM 和 SRAM 两部分。例如,A100 GPU具有40-80 GB的高带宽内存(上图中的 HBM,即我们平时说的“显存”),带宽为 1.5TB/s,并且108个流式多核处理器都有 192 KB 的片上 SRAM,带宽约为 19 TB/s。片上 SRAM 比 HBM 快一个数量级,但容量要小很多个数量级。
在 GPU 运算之前,数据和模型先从 CPU 的内存(上图中的DRAM)移动到 GPU 的 HBM,然后再从 HBM 移动到 GPU 的 SRAM,CUDA kernel 在 SRAM 中对这些数据进行运算,运算完毕后将运算结果再从 SRAM 移动到 HBM。
所以提高Attention运算效率,需要从降低attention的时间和空间复杂度入手。
时间复杂度
在\(S = QK^T\)的计算过程中,理论上尝试的方法主要可以分为稀疏 (sparse) 估计和低秩 (low-rank) 估计。但是在实际应用中仍然存在一些缺陷:
- 性能比不上原始 attention。不论是稀疏估计、低秩估计还是其他,这些方法都采用了某种近似算法来估算注意力权重矩阵,难免会丢失信息。目前主流的还是原始的attention
- 无法减少内存读取的时间消耗。这些方法只能降低 attention 的计算复杂度,但是无法对 attention 运算过程中的空间复杂度等进行控制,无法减少内存读写带来的时间损耗
所以在时间复杂度方向的优化主要在softmax的计算过程中:
\( \text{softmax}(x_i) = \frac{e^{x_i}}{\sum_{k=1}^{N} e^{x_k}} \)
Native softmax算法分二次迭代:
- 计算 softmax 分母
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad d_i = d_{i-1} + e^{x_i} \end{aligned} \)
- 求对应位置的softmax
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad a_i = \frac{e^{x_i}}{d_N} \end{aligned} \)
softmax 有个问题,那就是很容易溢出。比如float16的最大值为65504,所以只要 \(x ≥ 11\)的话softmax就溢出了。好在 exp 有这么一个性质,那就是\(e^{x - y} = \frac{e^x}{e^y}\),根据这个性质,可以在分子分母上同时除以一个数,这样可以将的范围都缩放到范围内,保证计算 softmax 时的数值稳定性。Safe Softmax 的数学公式是:
\( \text{SafeSoftmax}(x_i) = \frac{e^{x_i - m}}{\sum_{k=1}^{N} e^{x_k - m}} \quad \text{其中 } m = \max(x_1, x_2, ..., x_N) \)
这个算法可以分成三次迭代来执行:
- 遍历所有数,求 x 中的最大值m
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad m_i = \max(m_i, x_i) \end{aligned} \)
- 计算 softmax 分母,并根据m对其进行缩放
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad d_i = d_{i-1} + e^{x_i - m_N} \end{aligned} \)
- 求对应位置的 softmax
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad a_i = \frac{e^{x_i - m_N}}{d_N} \end{aligned} \)
分析以上步骤可以发现,如果是不做任何优化的话,至少要进行和 GPU 进行6次通信(3次写入,3次写出),如果对每一步的for循环进行一些并行切分的的话,还要加上 reduce_sum 和 reduce_max 之类的通信成本。所以2018年 Nvidia 提出了《Online normalizer calculation for softmax》,核心改进是去掉第二步中\( d_i = d_{i-1} + e^{x_i - m_N} \)对\( m_N \)的依赖,设\( d_i' = \sum_{j}^{i} e^{x_j - m_i} \)(这里的全局最大值变成了当前最大值),这个式子有如下的性质:
\( \begin{aligned} d_i' &= \sum_{j}^{i} e^{x_j - m_i} \\ &= \sum_{j}^{i-1} e^{x_j - m_i} + e^{x_i - m_i} \\ &= \sum_{j}^{i-1} e^{x_j - m_{i-1} + m_{i-1} - m_i} + e^{x_i - m_i} \\ &= \left( \sum_{j}^{i-1} e^{x_j - m_{i-1}} \right) e^{m_{i-1} - m_i} + e^{x_i - m_i} \\ &= d_{i-1}' e^{m_{i-1} - m_i} + e^{x_i - m_i} \end{aligned} \)
这个式子依赖于\( d_{i-1}' \),\( m_i \),\( m_{i-1} \)。那么就可以将softmax前两步合并到一起:
- 求 x 的最大值 m, 计算 softmax 的分母
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad m_i = \max(m_i, x_i) \\ &\quad d_i' = d_{i-1}' e^{m_{i-1} - m_i} + e^{x_i - m_i} \end{aligned} \)
- 求对应位置的 softmax
\( \begin{aligned} &\text{for } i \leftarrow 1, N \text{ do} \\ &\quad a_i = \frac{e^{x_i - m_N}}{d_N} \end{aligned} \)
以上的算法优化可以将3步合并变成2步,将softmax的时间复杂度降为\\(O(n^2)\)。
Python代码实现
下面是一个简单的 Python 实现,展示了如何用 Online Softmax 处理数据流:
import math def online_softmax(x): """ 在线计算 Softmax,单次遍历,适合流式数据处理 参数: x: 可迭代对象,输入的数值序列 返回: Softmax 输出列表 """ m = float('-inf') # 当前最大值 d = 0.0 # 当前分母 exp_values = [] # 存储 e^{x_i - m},用于最终归一化 # 单次遍历:更新最大值和分母 for xi in x: m_new = max(m, xi) d = d * math.exp(m - m_new) + math.exp(xi - m_new) exp_values.append(math.exp(xi - m_new)) m = m_new # 计算 Softmax 输出 result = [v / d for v in exp_values] return result # 示例用法 if __name__ == "__main__": x = [1.0, 2.0, 3.0, 4.0, 5.0] result = online_softmax(x) print("输入:", x) print("Softmax 输出:", result) print("和:", sum(result)) # 验证和为 1
空间复杂度
在将3步合成2步的同时:
- 借助GPU的share memory来存储中间结果,将上面的两步只用一个 kernel 实现,这样就只需要与 global memory 通信两次(一次写入数据,一次读取结果)
- 还可以减少 Reduce_max 和 Reduce_sum 之类的通信成本
空间复杂度方面优化的基本思路是降低Attention对于显存的需求,减少HBM和SRAM之间的换入换出,充分利用 GPU 的并行优势,进而减少Attention运算的时间消耗。
总结
Flash Attention的动机是尽可能避免大尺寸的注意力权重矩阵在 HBM 和 SRAM 之间的换入换出。论文中具体方法包含两个部分:tiling 和 recomputation。
tiling 的基本思路:不直接对整个输入序列计算注意力,而是将其分为多个较小的块,逐个对这些块进行计算,增量式地进行 softmax 的规约。规约过程中只需要更新某些中间变量,不需要计算整个注意力权重矩阵,就是以上介绍的将三步合并成两步的过程。
recomputation 的基本思路:基于 tiling 技巧,在反向传播过程中不保留整个注意力权重矩阵,而是只保留前向过程中 tiling 的某些中间变量,然后在反向传播过程中重新计算注意力权重矩阵。recomputation 可以看作是一种基于 tiling 的特殊的 gradient checkpointing,想进一步了解 recomputation 的读者可以翻阅Flash Attention原文。
得益于上述技巧,Flash Attention 可以同时做到又快(运算速度快)又省(节省显存)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号