

利用ENV/深度学习工具提取防尘网覆盖信息
为扬尘治理和保护环境,城市的裸露地表、易扬尘物料等要求覆盖防尘网。防尘网一般由聚乙烯材料制作的网状物,颜色主要为黑色和绿色。
本文介绍利用遥感影像和ENVI深度学习工具快速提取防尘网覆盖信息,数据和处理环境如下:
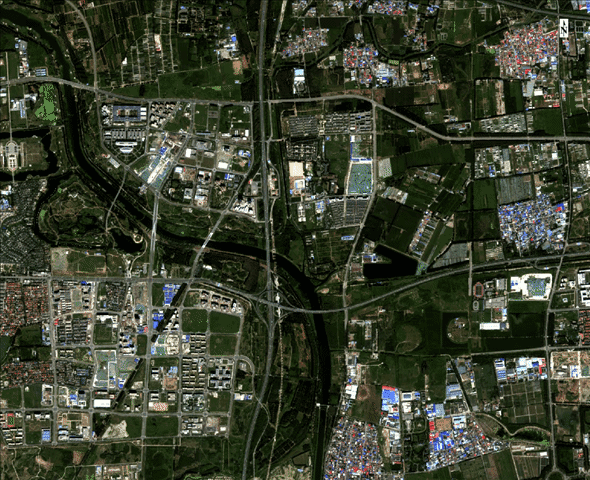
- 数据源:标准景高分二号3.8米4波段多光谱数据,16bit
- 处理软件:ENVI5.5.2+ENVI Deep Learning深度学习模块,软件试用可访问:http://blog.sina.com.cn/s/blog_764b1e9d0102ycm2.html
- 处理计算机:ThankPAD P52笔记本,NVIDIA Quadro P3200 6G显存。
提取效率和结果如下:
|
内容 |
时间 |
|
样本选择 |
小于10分钟 |
|
模型训练 |
34分钟 |
|
图像分类 |
小于2分钟 |
|
总共36分钟 |
|
ENVI Deep Learning深度学习工具操作步骤主要分为三步,下面我们详细介绍整个操作过程。
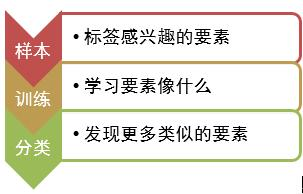
图:操作步骤
1 选择样本
从整景影像中选择小部分区域来选择样本和训练模型。
(1) ENVI中打开图像,之后放大和定位到需要选择的样本的区域。
(2) 选择File –>Save As->>Save As….。
(3) 在文件选择对话框中,选择图像文件,单机Spatial Subset按钮,选择当前视图作为子区选择源,选择输出路径保存。
(4) 在图上确认防尘网解译标志,如下图所示即为防尘网,覆盖时间较短和较长情况下的防尘网。

图:图像上的防尘网
(5) 利用ROI工具在上一步裁剪图像上选择防尘网作为样本,沿着防尘网边界绘制多边形。

图:样本分布(黄色区域)
(6) 在Toolbox中,启动/Deep Learning/Deep Learning Guide Map 流程化工具。
注:ENVI Deep Learning工具有两种操作方式:流程化和分布式,本文选择的是流程化操作方式。分布式选择相应的工具即可,如本步骤选择/Deep Learning/Build Label Raster from ROI。
(7) 在ENVI Deep Learning面板中,单击Train a New Model按钮。
(8) 在Train a New Model面板中,单击Build Label raster form ROI。
(9) 在Build Label raster form ROI面板上,分别选择裁剪图像、样本ROI文件、输出文件,单击OK执行,完成样本选择步骤。
注:Build Label raster form ROI工具是将ROI格式的样本文件转成标签文件,标签文件中的一个波段其实就是一个二值图,样本区值为1,其他区域值为0。该步骤生成一个裁剪图像(4个波段)与标签图像合成的一个5波段图像文件。
(10)重复上述步骤,在另外一块图像上选择样本作为验证样本,本步骤为可选项。
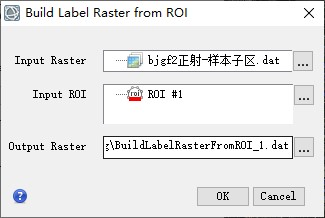
图:Build Label raster form ROI面板
2 训练模型
(11)在Train a New Model面板中,单击Train Model按钮。
(12)在Train TensorFlow Mask Model面板中,单击New Model按钮,新建一个初始化模型文件。
(13)在弹出的Initialize ENVINet5 TensorFlow Model对话框中:
- Number of bands(样本文件的波段数):4。
- Output Model:选择输出路径和文件名
(14)在Training Rasters中选择训练标签图像。
(15)在Validation Rasters中选择验证标签图像,如果没有验证样本,这里可以选择训练标签图像。
(16)其他参数先按照默认,参数的详细解释见后表。
(17)选择模型输出路径和文件名,单击OK执行。
注:这一步将会用到GPU运算,如果没有GPU则使用CPU计算,速度会较慢。
(18)最终会得到一个 .h5的规则文件,其实就是一个HDF5格式的文件。通过Deep Learning Guide Map 面板中的Tools->Edit TensorFlow Model Metadata工具可以浏览训练模型的生产精度(validationPrecision)、用户精度(validationRecall)和F1值。
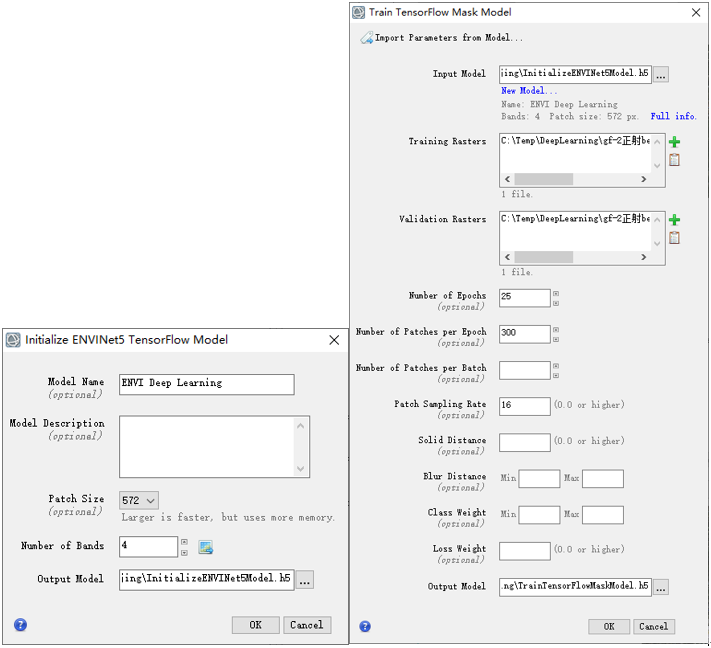
图:Train TensorFlow Mask Model面板
表:Train TensorFlow Mask Model主要参数说明
|
参数 |
说明 |
|
Patch Size |
l 此值与GPU显存有关 l 值越大,效率越高,对显存要求越高 l 切片大小不能大于标签图像行列数 |
|
Number of Epochs |
迭代数,建议在 16 到 32 之间 |
|
Number of Patches per Epoch |
每次迭代训练的切片数 l 此值一般在 200 到 1000 之间 l 训练数据集数量越少,设置此值越小 |
|
Number of Patches per Batch |
一次处理使用的切片数 l Batch 是指一次迭代使用的一组切片 l 如果为空,ENVI 将自动确定合适的值 |
|
Patch Sampling Rate |
切片采样比率 l 当特征稀疏时,增加该值可能会有所帮助 l 对于较小的切片大小,增加此参数 |
|
Solid Distance |
固定距离(单位像素) 对于宽度一致的线性特征(如道路、道路中心线和运输集装箱)或尺寸一致的紧凑型特征(汽车和停车标志),建议定义该参数。 |
|
Blur Distance |
模糊距离(单位像素) l 深度学习算法很难学习诸如建筑物等特征的锐利边缘。模糊边缘,并在训练过程中减少模糊距离可以帮助模型逐渐聚焦于特征。 l 模糊距离最大值必须小于70。 |
|
Class Weight |
一般来说,为稀疏训练集设置最大值。有效范围在 0.0 和 6.0 之间。 |
|
Loss Weight |
参数可用于偏差损失函数(bias the loss function),以更加注重正确识别特征像素,而不是识别背景像素。 此参数在特征目标稀疏分布或者没有标记所有特征时很有用。值为0表示模型应同等对待特征和背景像素。增加Loss Weight参数会使损失函数偏向于寻找特征像素。此参数值的有效范围在 0 到 3.0 之间。 |
3 图像分类
(19)Deep Learning Guide Map 流程化工具进入Classify Raster Using a Trained mode面板。
(20)在Classify Raster Using a Trained mode面板中,单击Classify Raster Using a Trained Model按钮。
- Input Raster:输入整景高分二号影像。
- Input Model:输入上一步获取的模型文件(自动输入)。
- Output Raster:选择输出结果。
(21)单击OK执行。
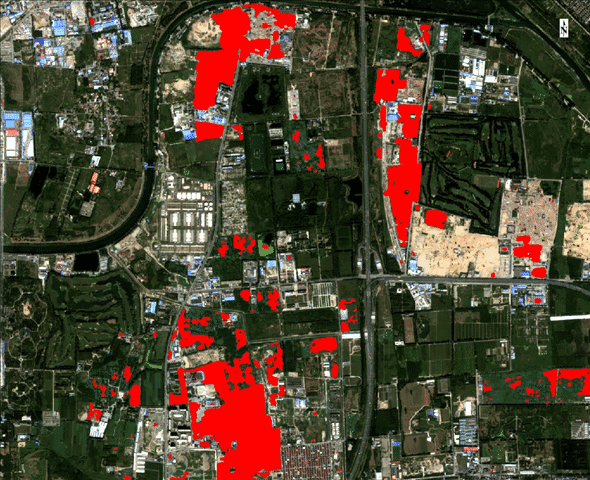
得到的结果是一个单波段的灰度图,像素值(0~1范围)表示与样本的相似程度,像素值越大表示属于该类别的可能性越大。我们可以采用密度分割方法进一步提取结果。
(22)执行完分类后,自动跳转到Post-Classification面板。单击Class Activation to Classification按钮。
注:也可以直接生成Shapefile矢量结果,单击Class Activation to polygon Shapefile按钮。
(23)在Class Activation to Classification面板中,可以手动设置分割阈值,也可以选择自动方法,这里选择Otsu自动阈值分割。
(24)选择输出结果名称和路径,单击OK执行。
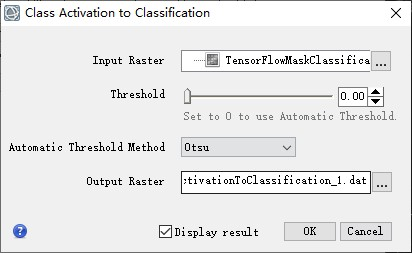
图:Class Activation to Classification面板
本文来自地理遥感生态网平台www.gisrs.cn,作者:地理遥感生态网平台,转载请注明原文链接:https://www.cnblogs.com/gisrs365/p/18269815

 浙公网安备 33010602011771号
浙公网安备 33010602011771号