

Xgboost理解
一、xgboost模型函数形式
xgboost也是GBDT的一种,只不过GBDT在函数空间进行搜索最优F的时候,采用的是梯度下降法也就是一阶泰勒展开;而xgboost采用的是二阶泰勒展开也就是牛顿法,去每次逼近最优的F,泰勒展开越多与原函数形状越接近,比如在x0处进行展开,其展开越多,x0附近与原函数值越接近,且这个附近的区域越大。另外一个xgboost加入了正则化项,有效防止过拟合。
xgboost与GBDT都是采用的cart树中的回归树来解决所有问题,回归树的预测输出是实数分数,可以用于回归、分类、排序等任务中。对于回归问题,可以直接作为目标值,对于分类问题,需要映射成概率,比如采用逻辑回归的sigmoid函数。

additive表示附加的,所谓additive training,就是每次add一颗树进行学习,直到损失最小。
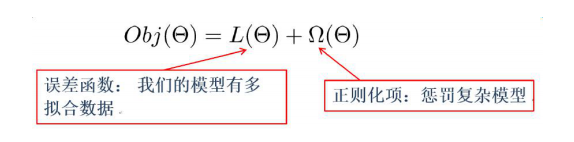
误差函数尽量去拟合训练数据,正则化项则鼓励更加简单的模型。因为当模型简单之后,有限数据拟合出来结果的随机性比较小,不容易过拟合,使得最后模型的预测更加稳定。
二、目标函数
1)回顾传统参数空间的目标函数
误差函数可以是square loss,logloss等,正则项可以是L1正则,L2正则等。正则项如果从Bayes角度来看,相当于对模型参数引入先验分布:
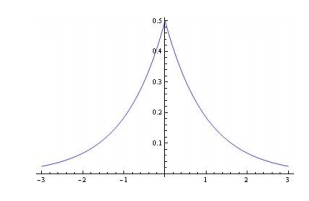
L1正则,模型参数服从拉普拉斯分布,对参数加了分布约束,大部分取值为0。
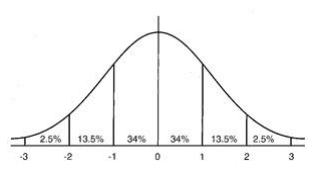
L2正则,模型参数服从高斯分布,对参数加了分布约束,大部分绝对值很小。
2)xgboost在函数空间搜索的目标函数
函数空间的目标函数是多棵树一起构建的目标损失函数,求解多棵树一起的整体最优解。

第一部分属于误差项,训练模型的精度;第二部分正则项对每一棵回归树的复杂度进行了惩罚,使得学习出来的模型不容易过拟合。
哪些指标可以衡量树的复杂度呢?
树的深度,内部节点个数,叶子节点个数,叶子节点分数等。
xgboost采用叶子节点个数T和叶子节点分数w(其实就是预测值)对树的复杂度进行约束:

对叶子节点个数进行惩罚,相当于进行了剪枝。
三、泰勒展开
基本形式:

一阶与二阶泰勒展开:

1)一阶泰勒展开(梯度下降法)
在机器学习任务中,需要最小化损失函数L(θ) ,其中θ 是要求解的模型参数。梯度下降法常用来求解这种无约束最优化问题,它是一种迭代方法:选取初值 θ0,不断迭代,更新θ的值,进行损失函数的极小化。
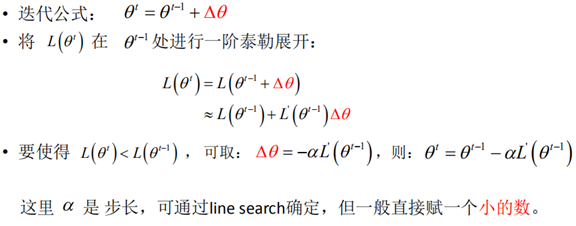
从上面可知,当△θ=-αL丶(θt-1)时候,θ的更新就跟我们之前理解的梯度下降方法是一摸一样。将△θ带入损失函数即可知,这个时候L(θt)是肯定比L(θt-1)变小的。
所以,从梯度下降法角度理解,就是函数值沿着梯度的负方向进行减少;从泰勒展开角度理解,就是函数在θt-1处进行一阶展开,并根据展开公式找到了比L(θt-1)更小的近似于L(θt)的值,因为泰勒展开本身就是用多项式形式近似表达函数的原形式。
2)二阶泰勒展开(牛顿法)
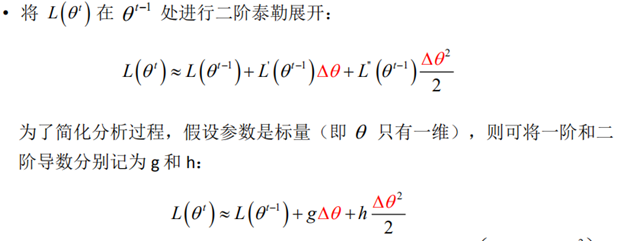
此时如何进行优化,寻找更小的L(θt)?
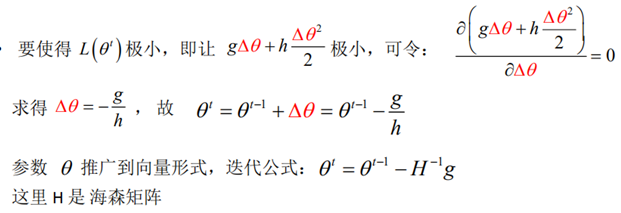
这时候利用泰勒二阶展开求解最优的△θ,使得L(θt)更小,泰勒二阶比一阶肯定更接近原函数的值,所求得的△θ也使得L(θt)下降的更快,这就是牛顿法的优势。
四、xgboost目标函数进行泰勒展开
xgboost在第t次迭代后,模型的预测等于前t-1次的模型预测加上第t棵树的预测:
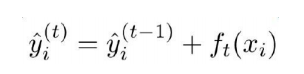
由于模型已经进行了t-1次迭代,也就是已经学习了t-1棵树,此时只要学习寻找最优的第t棵树函数ft即可,所以目标函数如下:

其中yi和yi(t-1)都属于已知的,可以理解为常数。
将目标函数在yi(t-1)处进行泰勒二次展开,因为我们一步步寻找的是最优的函数yi(t)使得L最小,就是上面所说的在函数空间进行的搜索,所以在yi(t-1)处进行泰勒二次展开寻找并学习下一颗树ft,这里的ft其实就相当于上文第三部门牛顿法中的△θ,不停的寻找ft,最后将这些树加起来就成了最优的yt,上文中也是不停的寻找△θ,最后θ*=θ0+Σ△θ,一样的道理。无非一个是在参数空间进行搜索,一个是在函数空间进行搜索。二次展开如下:

其中gi和hi分布如下:


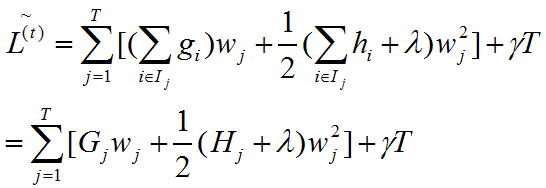
将常数项去掉,并把树的结构形式带入得到如下:

其实这个时候已经简洁地变成对t棵树的学习优化问题了,以叶子节点形式表示上述目标函数如下,其中Ij={i|q(xi)=j}表示j叶子节点上的样本集合。
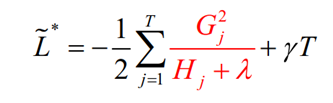
为了使目标函数最小,可以令其导数为0,解得每个叶节点的最优预测分数为:

带入目标函数,得到最小损失为:

五、如何进行分裂?
1)如何评测节点分裂的优劣?
ID3采用信息增益来评测,C4.5采用信息增益率、CART树采用基尼系数和平方损失来评测,xgboost采用如下的打分评测:
其实就是上面的最小损失值的公式,如果分裂后能让损失变得更小,就值得去分裂,所以分裂前后增益定义为:
这个Gain就是分裂前的损失-分裂后的损失,差值越大,代表分裂后的损失越小,所以当对一个节点进行分裂时,计算所有候选(feature,value)对应的gain,选区gain最大的进行分裂。
2)寻找分裂节点
1、精确算法-暴力穷举搜索法
遍历所有特征的所有可能的分割点,计算gain值,选取gain值最大的(feature,value)去分割。该方式优点是精度高,缺点是计算量太大。
2、近似算法-分位点分割
对于某一个特征,按照百分比确定候选分裂点,通过遍历所有特征的所有候选分裂点来找到最佳分裂点,减少了计算复杂度。
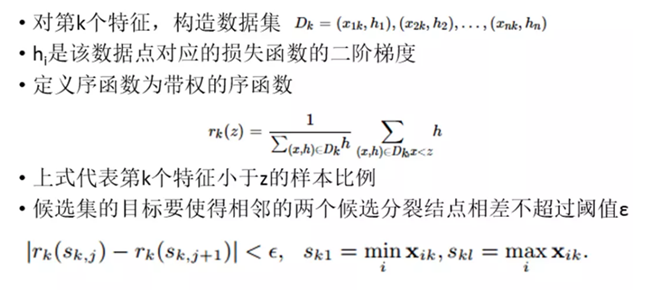
3.weighted quantile sketch(按权重的分位点算法)
该方法将样本对应的残差二阶导h作为划分依据,假设每一个分位点区间的h之和占总h的比率为rk(z),则两个相邻区间的rk之差小于一个固定值,如下所示:



 浙公网安备 33010602011771号
浙公网安备 33010602011771号