
深入解析:Airsim仿真、无人机、Lidar深度相机、DDPG深度强化学习
Airsim仿真、无人机、Lidar深度相机、DDPG深度强化学习——帮你突破SCI核心、EI会议、中文核心论文难关!
你想发论文,但不知道从哪里开始?
不论你是 老师 还是 学生,在当前竞争激烈的学术圈中,如何在SCI核心期刊 或 EI会议上发表高质量论文,是每个学术研究者心头的痛。如何让你的研究成果脱颖而出?如何应对审稿人挑剔的修改意见?这篇文章将给你供应一站式的论文辅导 和 修改支持,辅助你快速跑通论文写作、投稿流程,迈向学术高峰!
研究热点:Airsim仿真、无人机、无人车、Lidar、深度相机
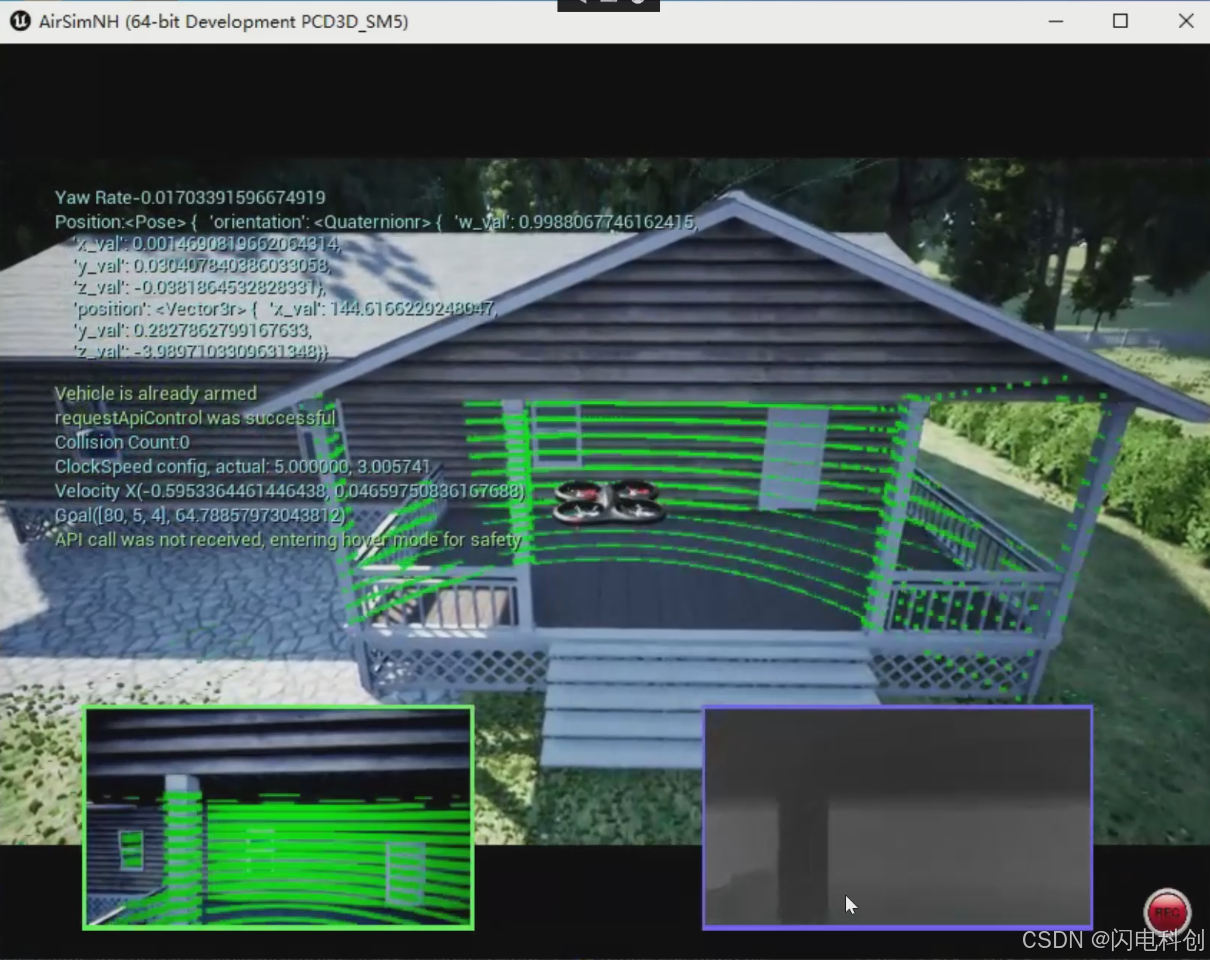
随着 无人机(UAV)、无人车(UGV) 以及 自动驾驶的快速发展,Airsim仿真平台已经成为行业的关键程序。而结合Lidar 和 深度相机的传感器资料,不仅能提升无人环境的环境感知能力,还能推动深度强化学习(如 DDPG) 在智能控制中的应用。想要在这些前沿领域发表高水平论文?看这里,我们帮你整理了最新的技术亮点和写作策略!
Airsim仿真与无人系统的完美结合
Airsim仿真平台是目前最热门的无人机、无人车仿真环境之一,它支持经过Lidar深度相机获取精确的环境信息,结合DDPG深度强化学习优化控制策略,提升环境自主性和精度。你是否正进行这类研究?想在SCI核心期刊上发表自己的成果?大家将援助你通过数据分析、算法优化、结果验证等,提升论文质量,确保顺利发表!
深度强化学习与DDPG优化路径规划
深度强化学习(DDPG)是无人驾驶领域中应用最广泛的强化学习算法之一。通过DDPG否在进行这类算法优化的研究?我们将帮助你在论文中清晰呈现算法的创新性与实验结果,确保通过就是,无人机和无人车能够在复杂环境中进行自主决策、规划路径、避障等。你审稿人的严格考核。
如何应对SCI、EI会议审稿?
论文投稿后,最让人头疼的莫过于如何应对审稿人的修改意见。无论是SCI核心期刊,还是 EI会议,审稿人都会关注论文的创新性、实验设计、数据分析等方面。我们提供专业的review修改辅导,支援你逐条应对审稿人意见,提升论文的通过率,让你从头到尾掌握学术写作技巧。
论文写作辅导与修改服务
- SCI核心期刊、EI会议投稿有难题?大家给出全程辅导,援助你打磨论文结构、优化内容、提升语言表达,确保你的论文符合高水平期刊和会议的标准。
- 中文核心期刊、北大核心、科技核心等国内顶尖期刊投稿?我们会根据各大期刊的要求,定制化修改,提升论文质量,确保顺利通过审稿。
- 针对深度学习与无人系统的前沿研究,大家提供个性化的论文修改服务,确保你的研究成果得到最大化的展示。
让你的论文从普通到卓越!
你还在为论文投稿而头疼吗?想让你的研究更具影响力,站在学术前沿?不管是Airsim仿真 还是 Lidar深度相机,无论是 DDPG深度强化学习 还是 无人机控制优化,大家都能为你提供专业的技术指导与写作辅导。让我们帮助你在SCI核心期刊 和 EI会议上轻松发表,让你的学术之路更加顺畅!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号