ROS2-Beginner:7-理解行为
背景
行为ROS2中的一种通信类型,用于长时间的运行任务。由三个部分组成:目标,反馈以及结果。
行为建立在话题和服务之上的。他们的功能类似于服务,但可以取消操作。他们还提供了稳定的反馈,而不是返回单一的响应的服务。
行为使用了一个客户端-服务器模型,类似于发布者和订阅者。一个行为客户端节点发送一个目标给到一个行为服务器节点,服务器节点会告知收到目标并返回一些反馈以及结果。

任务
1、打开turtlesim_node
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
2、ros2 node info
查看节点的信息
ros2 node info /turtlesim
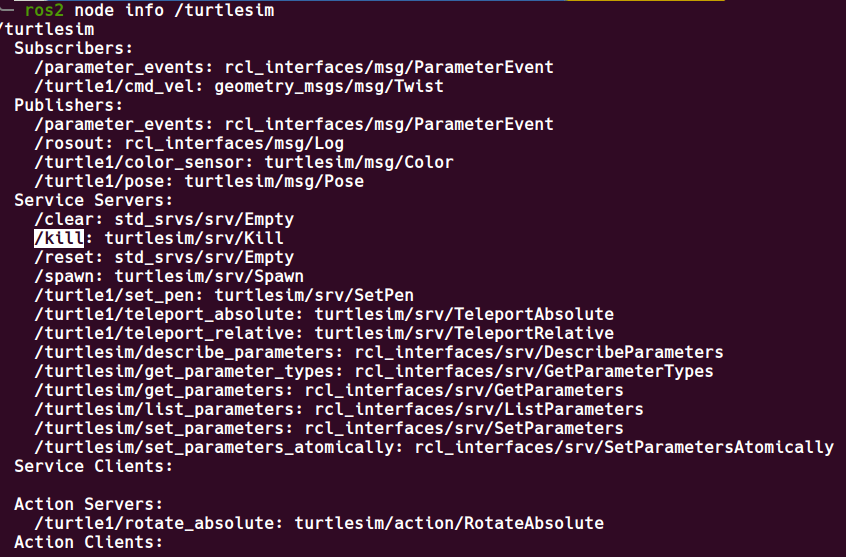
/turtlesim的action /turtle1/rotate_absolute是在Action Servers下。
节点/teteop_turtle有action名字/turtle1/rotate_absolute在Action Clents,它发送目标到该action名字上,运行如下,查看
/teleop_turtle Subscribers: /parameter_events: rcl_interfaces/msg/ParameterEvent Publishers: /parameter_events: rcl_interfaces/msg/ParameterEvent /rosout: rcl_interfaces/msg/Log /turtle1/cmd_vel: geometry_msgs/msg/Twist Service Servers: /teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters /teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes /teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters /teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters /teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters /teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically Service Clients: Action Servers: Action Clients: /turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
4 ros2 action list
查看ros graph中的所有action,运行如下命令:
ros2 action list
会返回如下:

4.1 ros2 action list -t
查看具体action的类型

5、ros2 action info
查看具体action的客户端和服务端
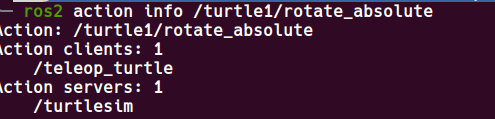
节点/teleop_turtle有一个action的客户端;
节点/turtlesim有一个action的服务器
6、ros2 interface show
在自己发送或执行行动目标之前,还需要一条信息,那就是行动类型的结构。
查看action的细节
ros2 interface show turtlesim/action/RotateAbsolute
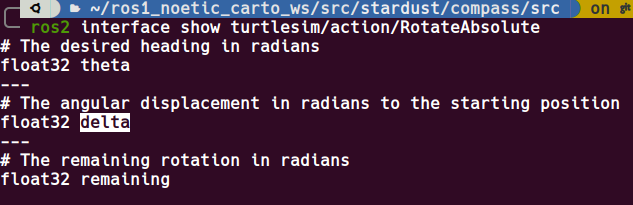
第一个theta为目标goal;第二个delta为:结果;第三个remaining为反馈;
7、ros2 action send_goal
从命令行中发送一个goal
ros2 action send_goal <action_name> <action_type> <values>
<values>需要yaml的格式
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
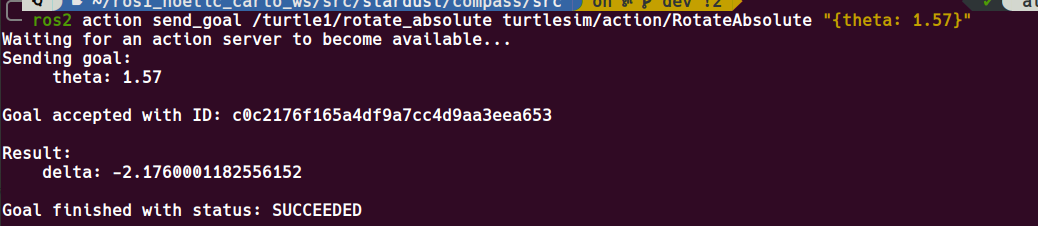
所有的goal有一个唯一的ID,如上所示,看到result,有一个域名字为delta,它是离起始位置的位移。
为了看发送目标的反馈,添加--feedback到命令ros2 action send_goal:
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: -1.57}" --feedback

总结
操作类似于允许您执行长时间运行的任务、提供定期反馈并且可以取消的服务。
机器人系统可能会使用动作进行导航。一个动作目标可以告诉机器人移动到一个位置。当机器人导航到该位置时,它可以沿途发送更新(即反馈),然后在到达目的地后发送最终结果消息。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号