


2021.07.25-关于离散点平滑中的曲率约束
之前一直不太明白如何在轨迹生成时考虑曲率约束,今天在b站看了一个关于apollo的离散点平滑的视频,这里记录一下视频内容和自己的一些总结。
原视频地址:https://www.bilibili.com/video/BV1Fi4y1F7Af
在无人机系统中:
系统方程:质点模型
目标函数:minimum snap 或 jerk
约束:最大最小速度,加速度约束
这三项均是线性的,所以可以用QP方法快速求解(求解器很多),甚至闭式解。
在无人车系统中:
系统方程:单车模型 或 差速模型
目标函数:多项组成
约束:转角,最大最小速度,加速度等。
其中系统方程是非线性的,需要用IPopt求解器求解。
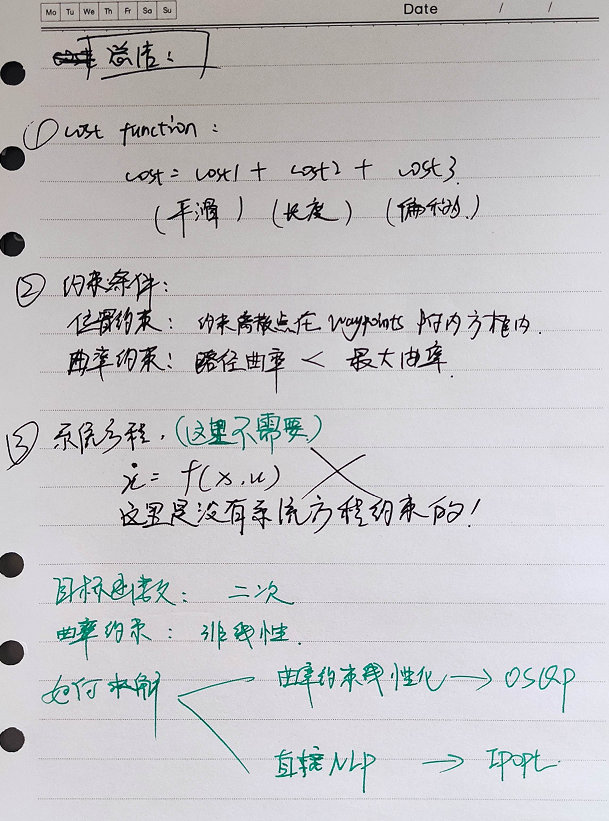
本文:
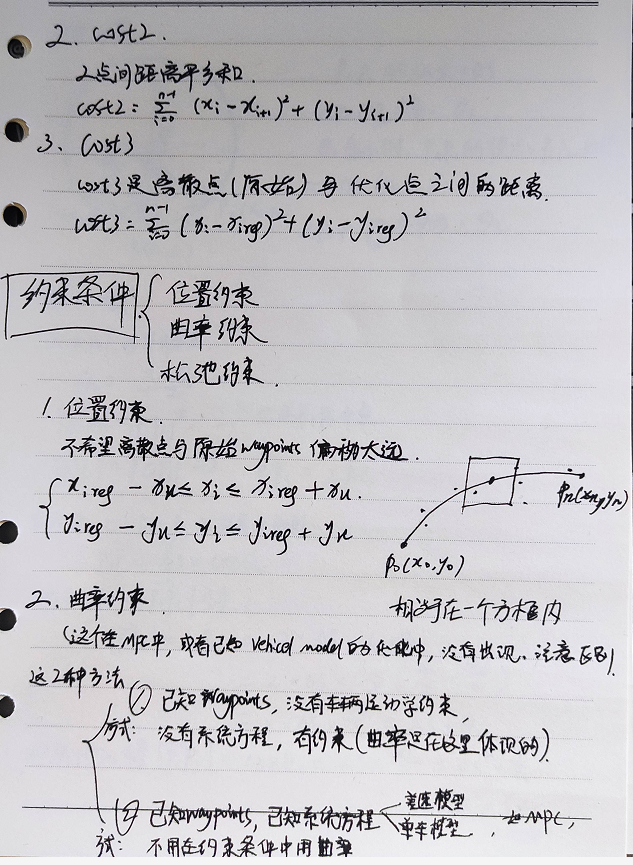
目标函数:光滑项,长度,偏移量
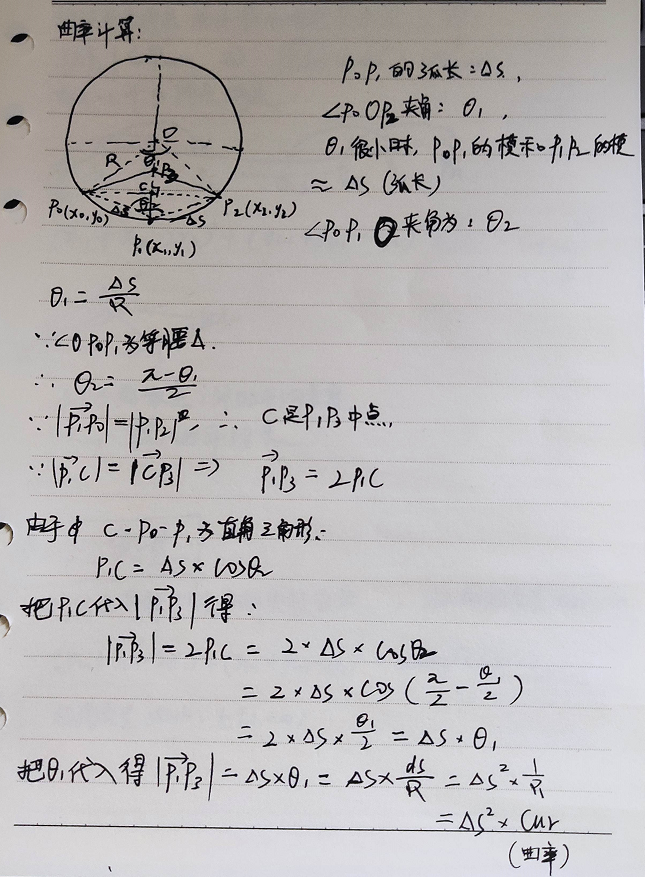
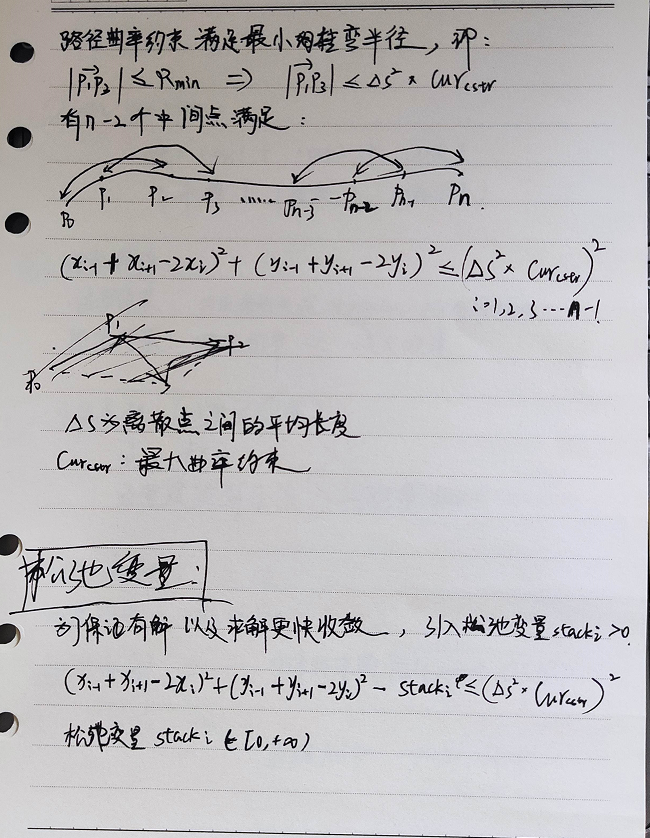
约束:曲率约束,位置约束
这里仅仅是拟合离散点,没有系统方程,虽然目标函数是二次的,但是曲率约束时非线性的,也需要Ipopt求解器求解,当然也可以想办法将曲率约束线性化。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号