
【飞控制作】从飞控制作学习项目经验
1. 四旋翼无人机飞行原理:欠驱动系统
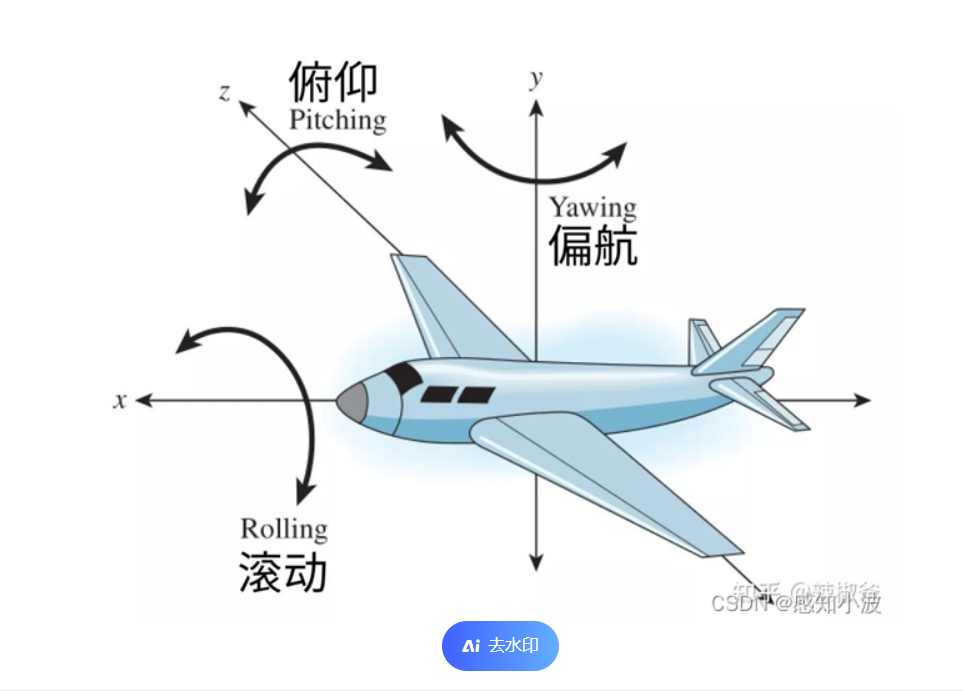
通过4个电机的转速,来控制飞行器X、Y、Z轴的加速度和角速度,实现悬停、垂直升降、俯仰、偏航、滚转(这里只对比较陌生的俯仰、偏偏行、滚转做示意图说明)。

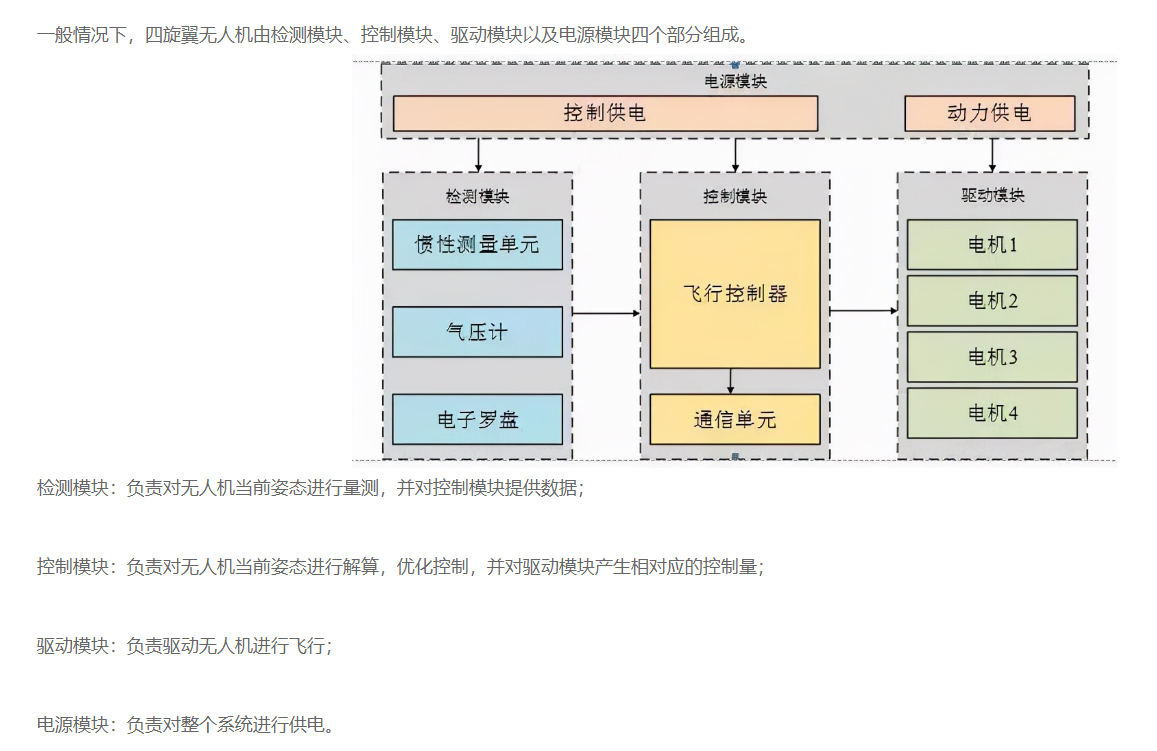
组成
运动控制
运动控制主要参考:四旋翼无人机飞行原理及控制方法,你了解多少?
实物图

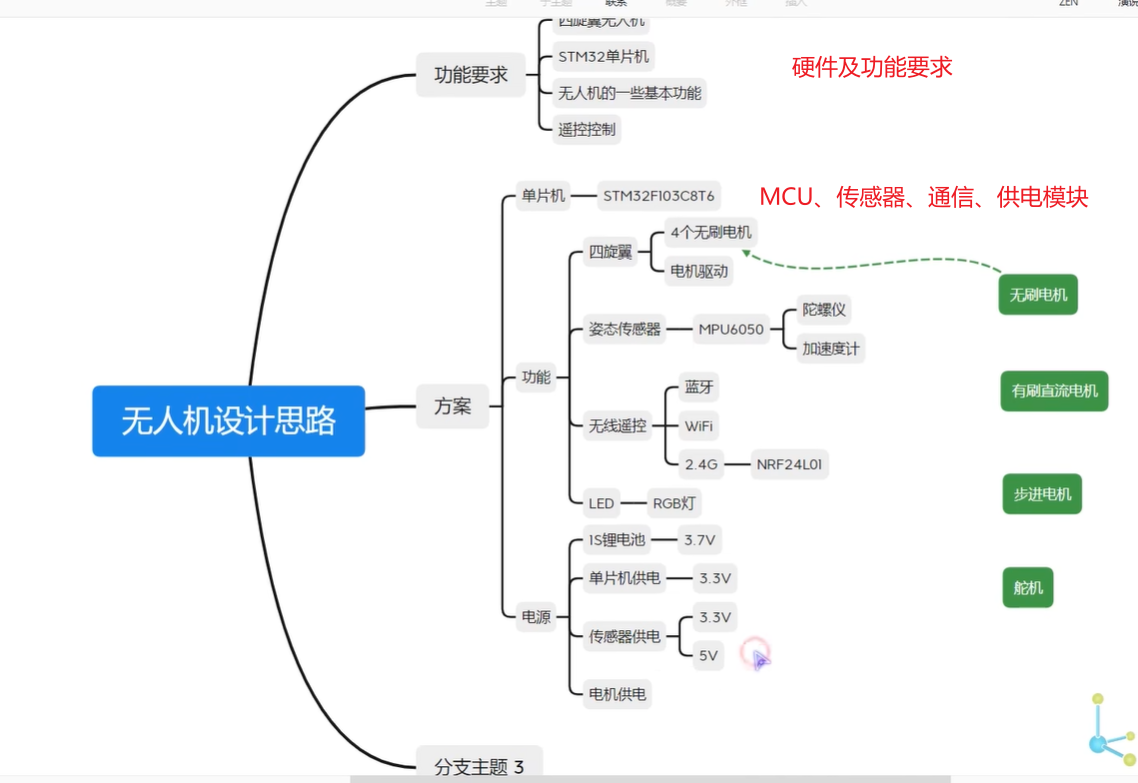
2. 无人机设计思路
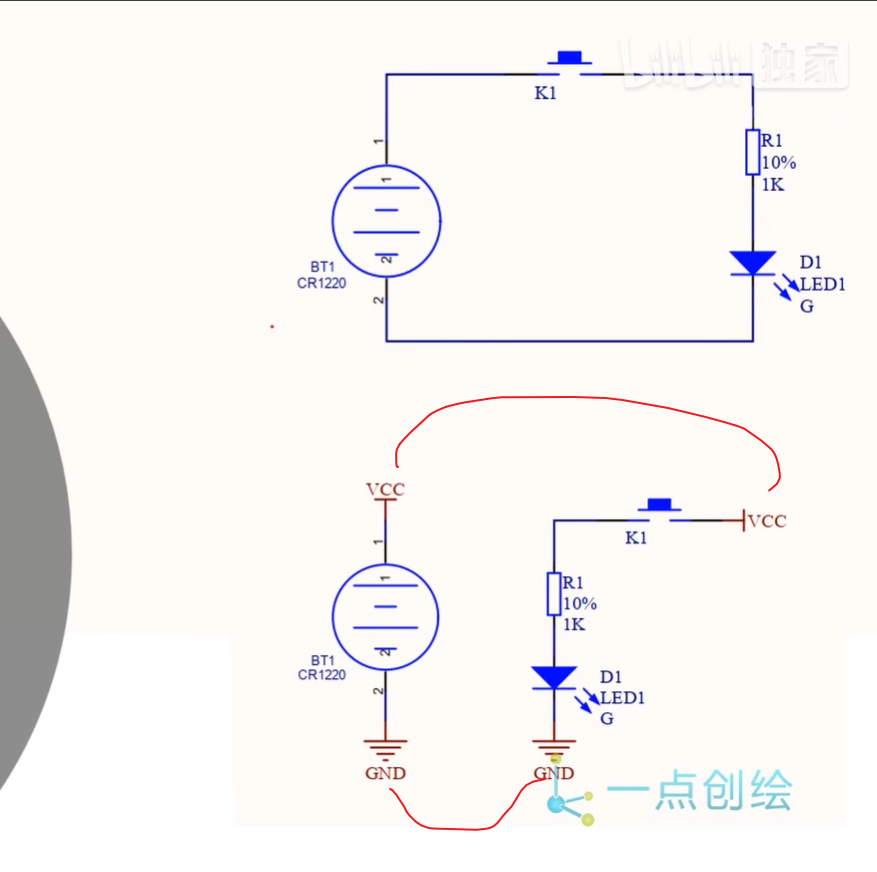
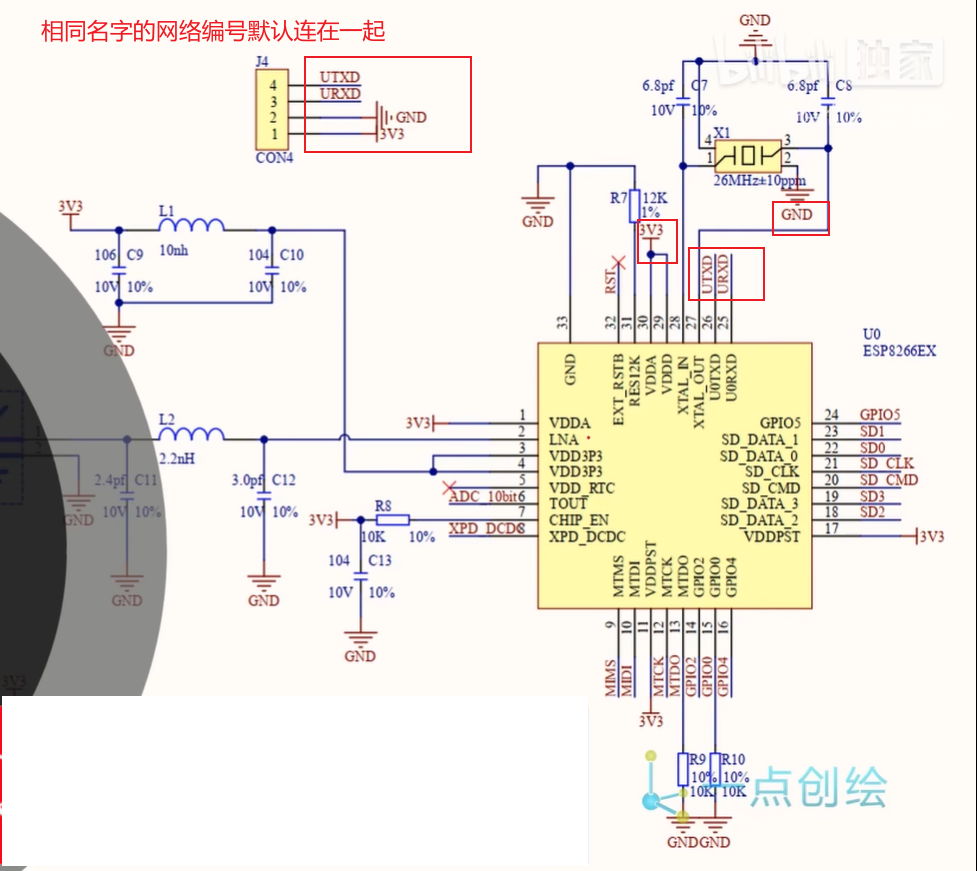
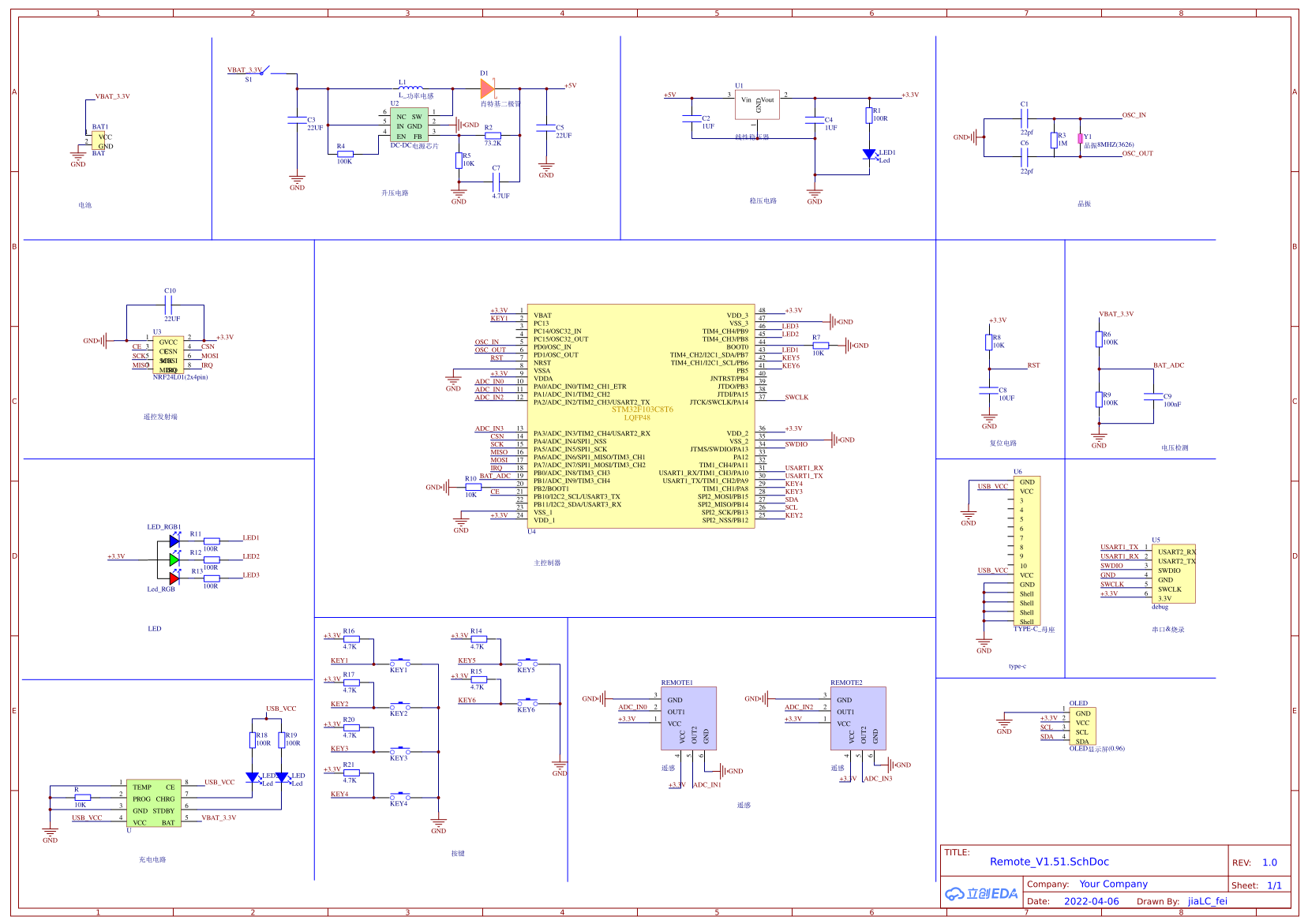
3. 原理图和电路
注意,电路图为上图,而实际设计电路时电路结构复杂,因此通常会用网络编号来来代表不同电路间的连接关系。相同网络编号的端子默认连在一起。
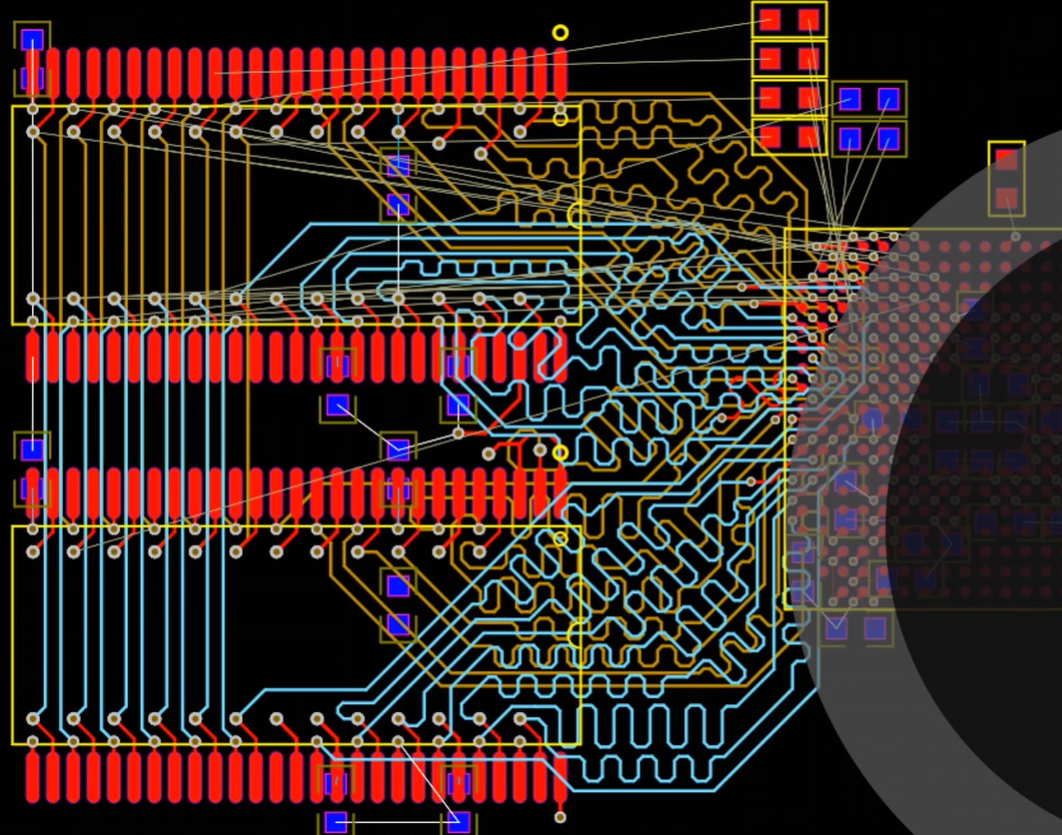
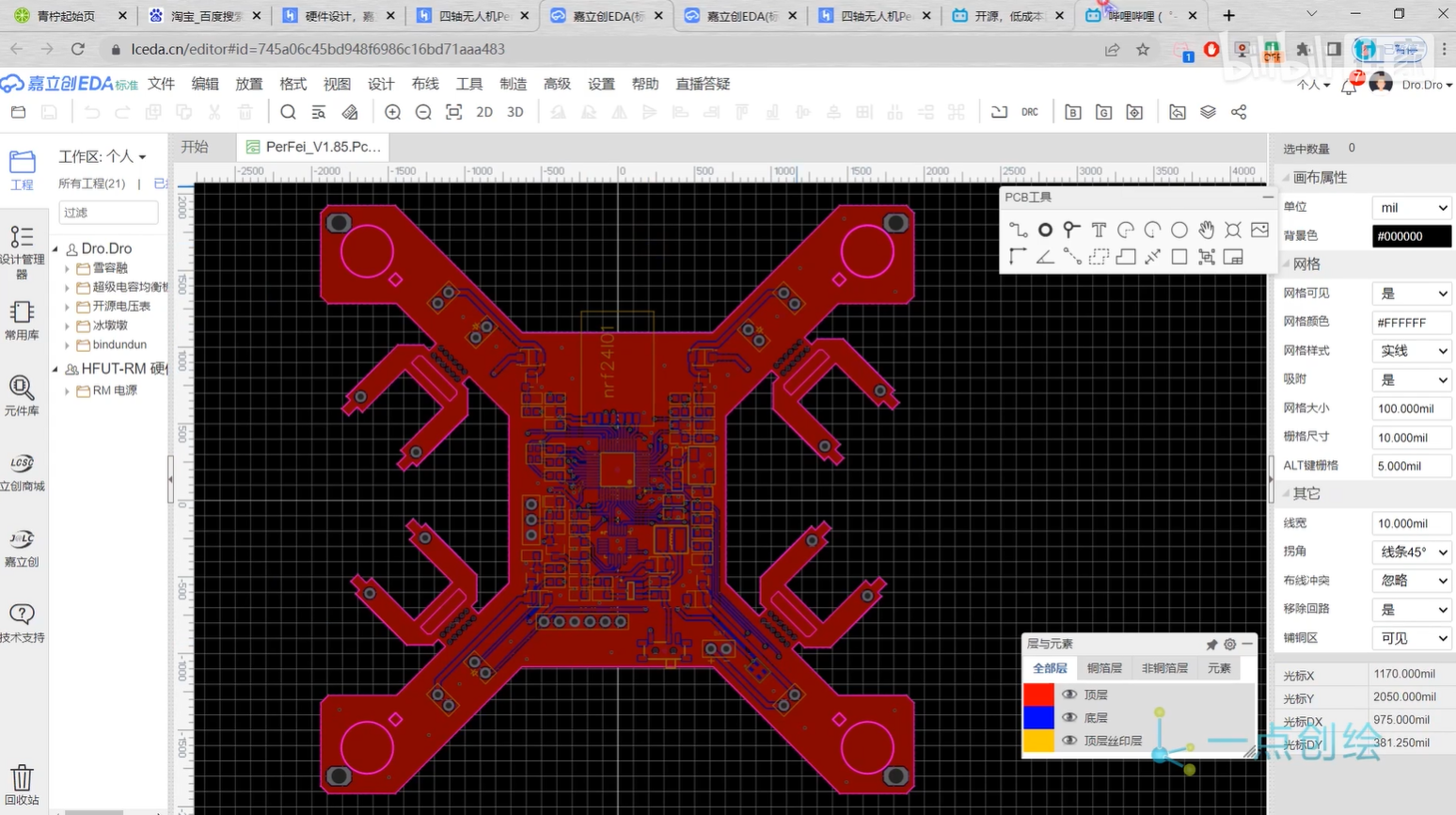
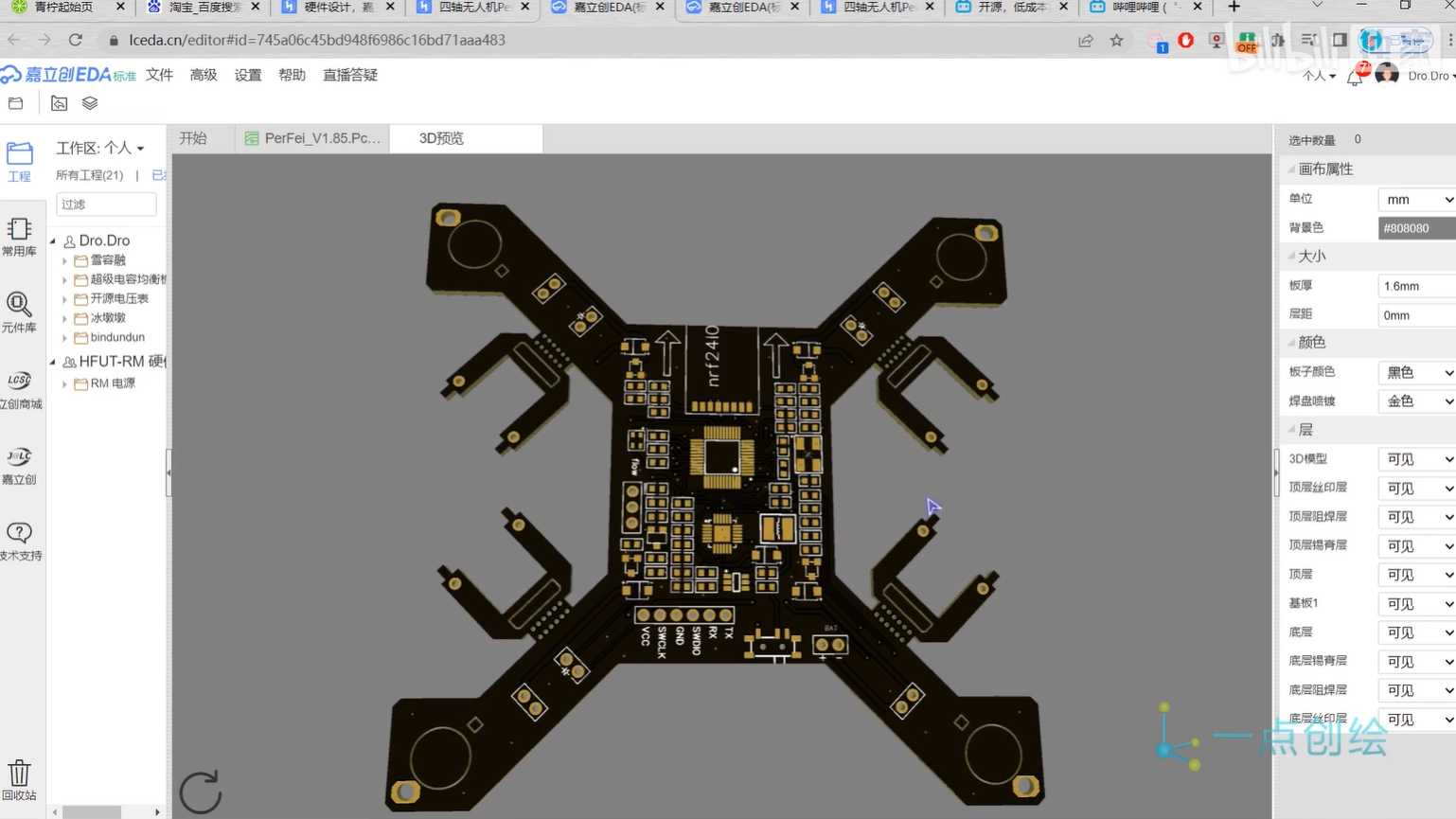
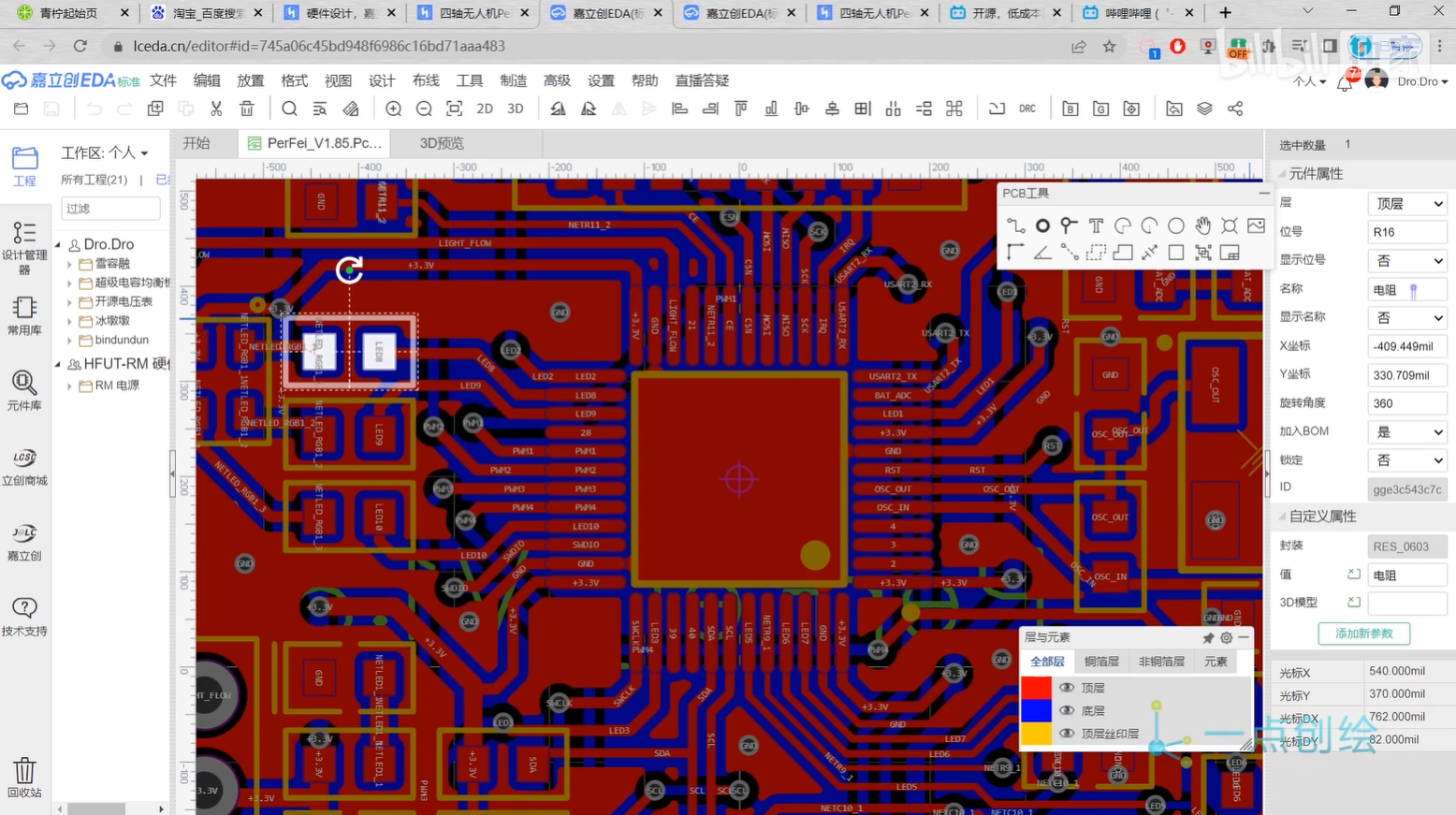
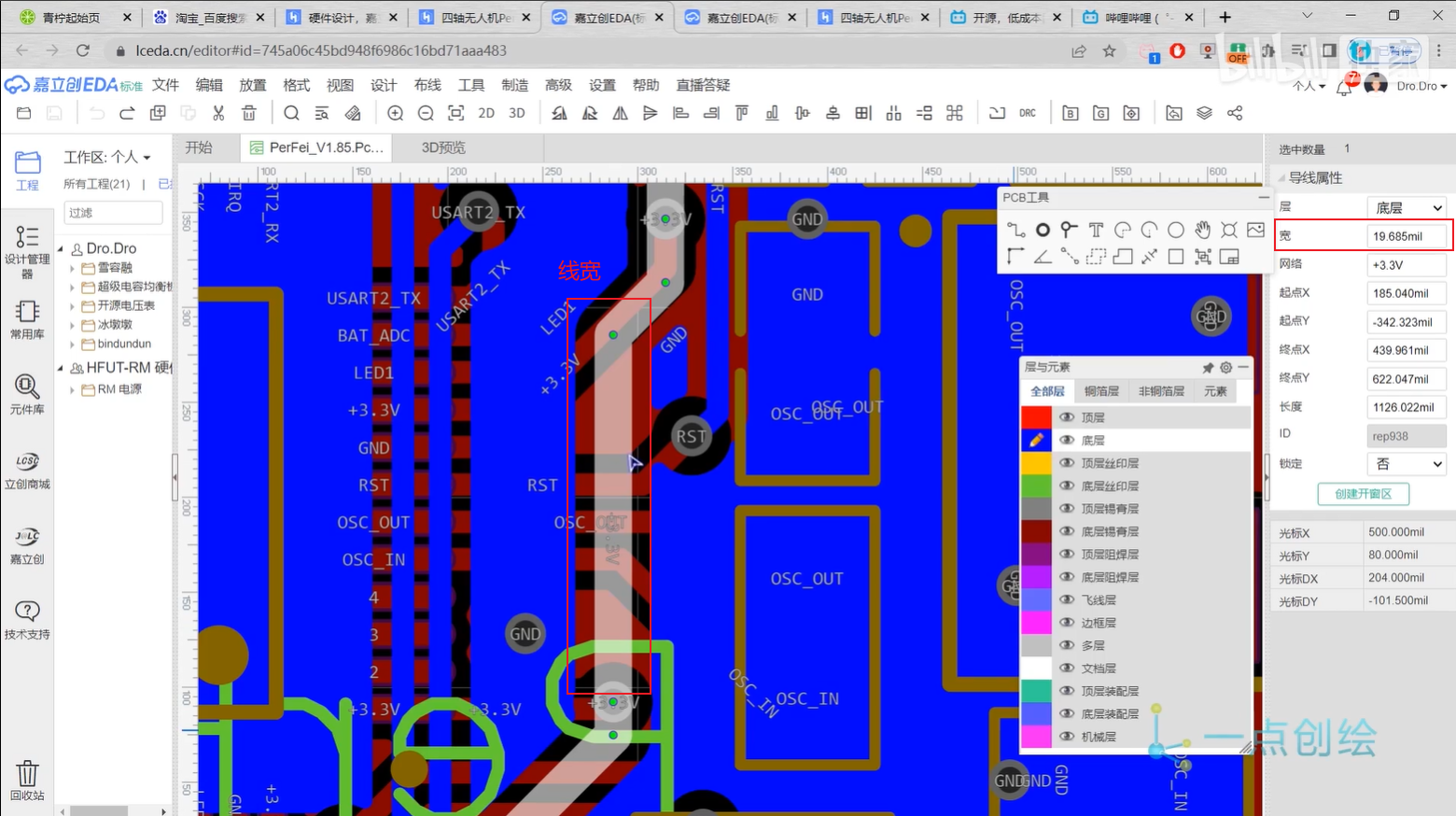
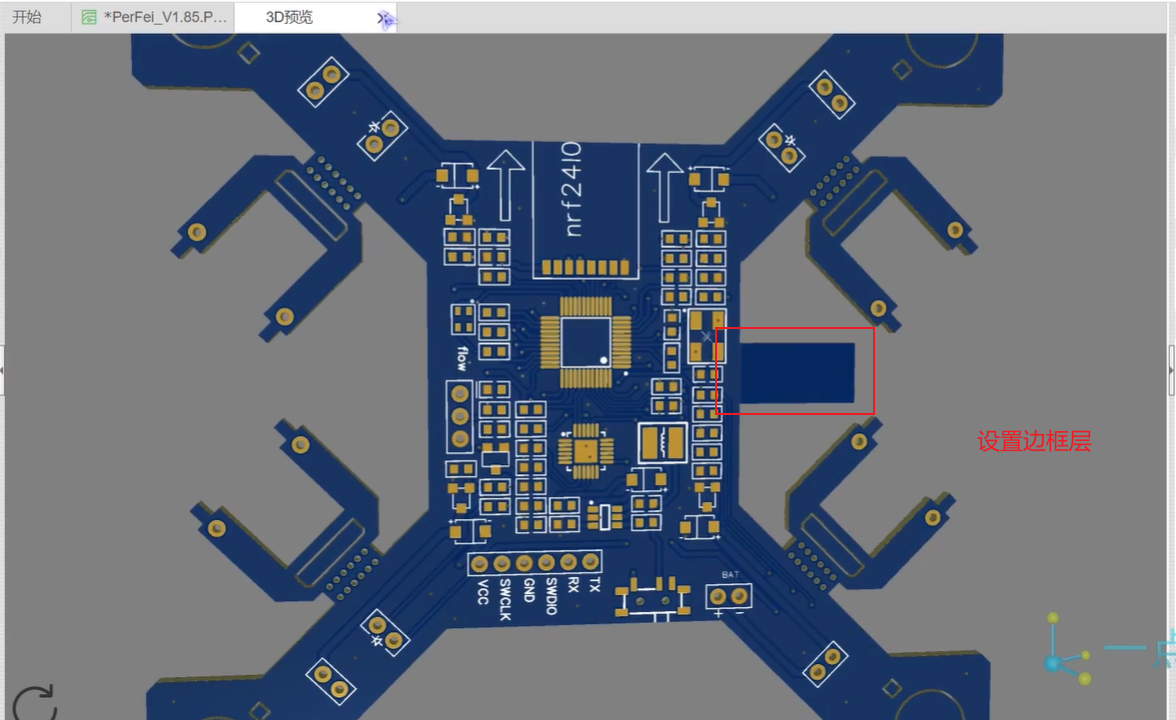
4. PCB设计
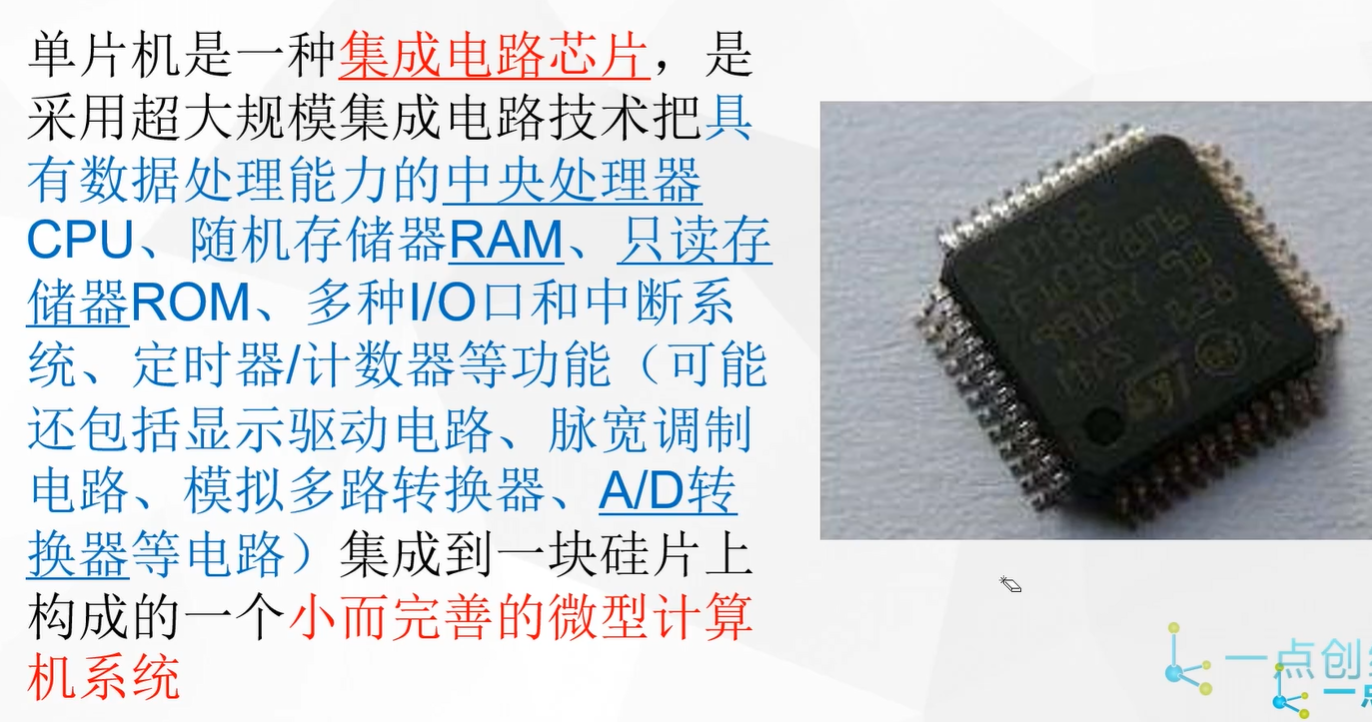
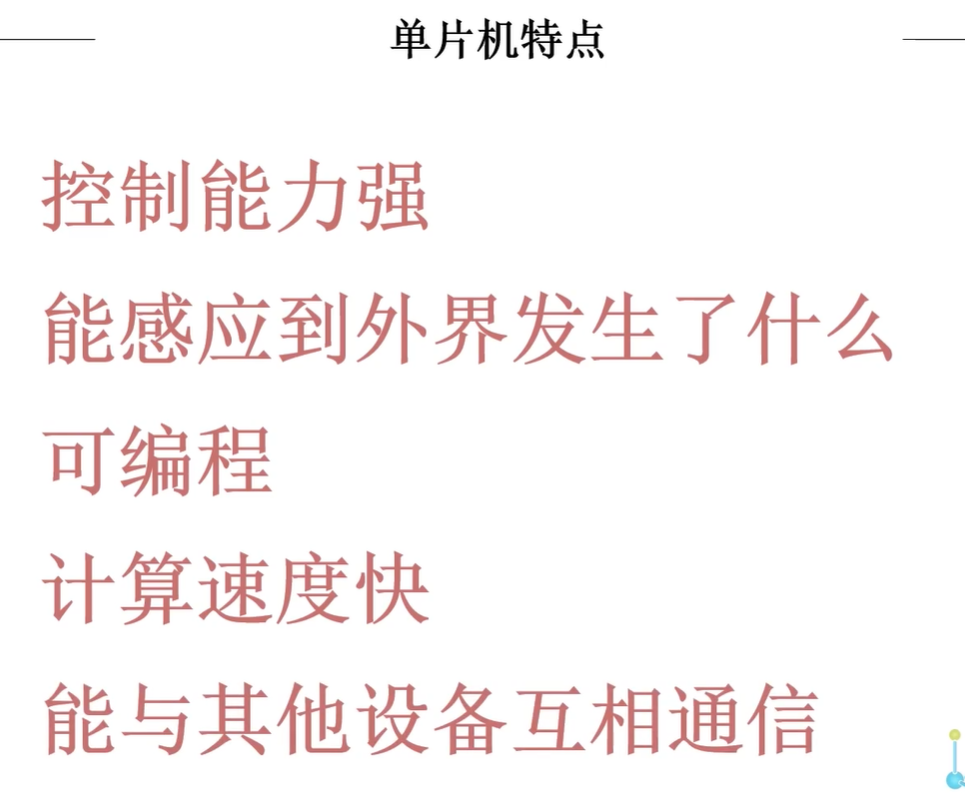
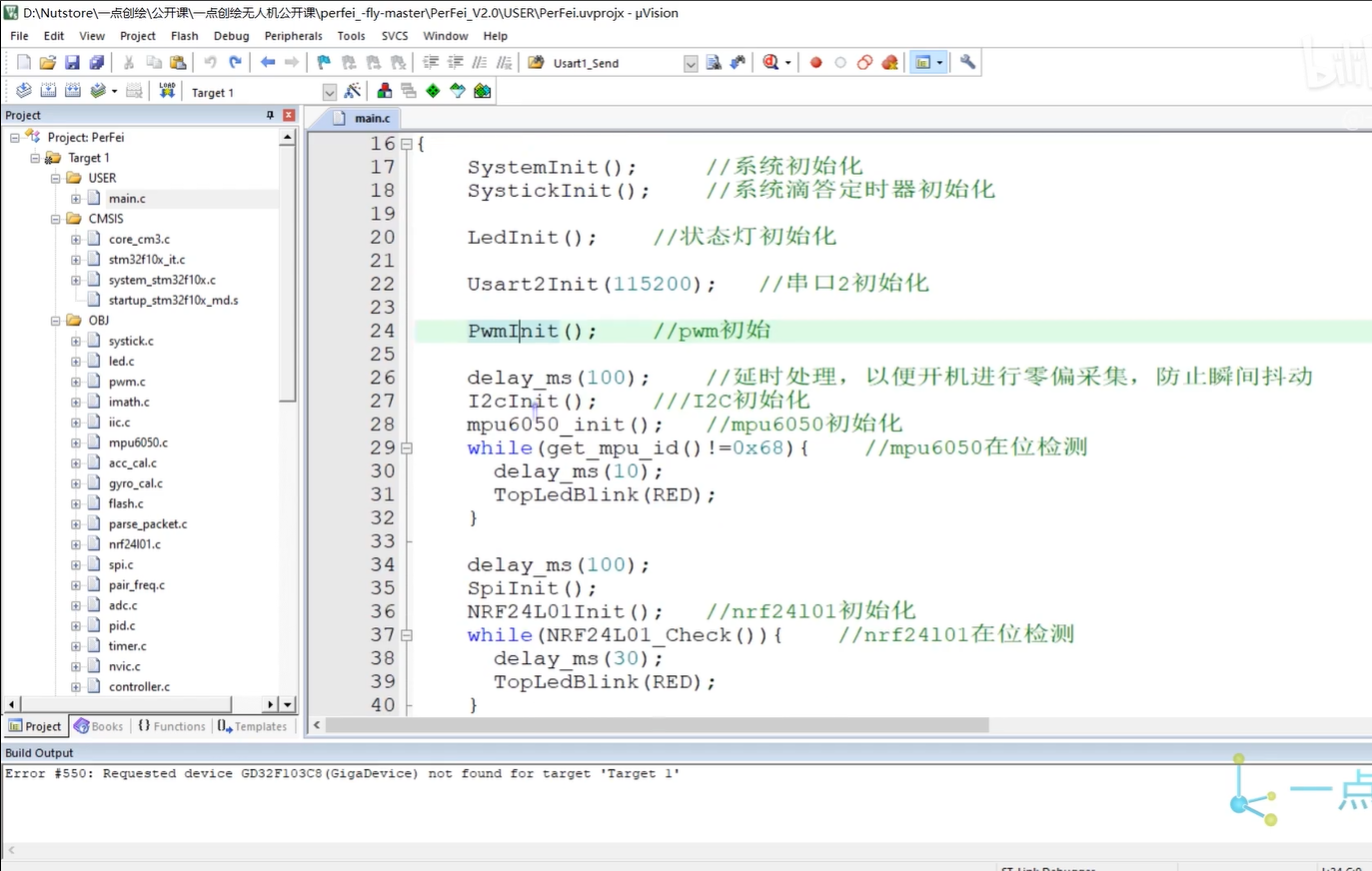
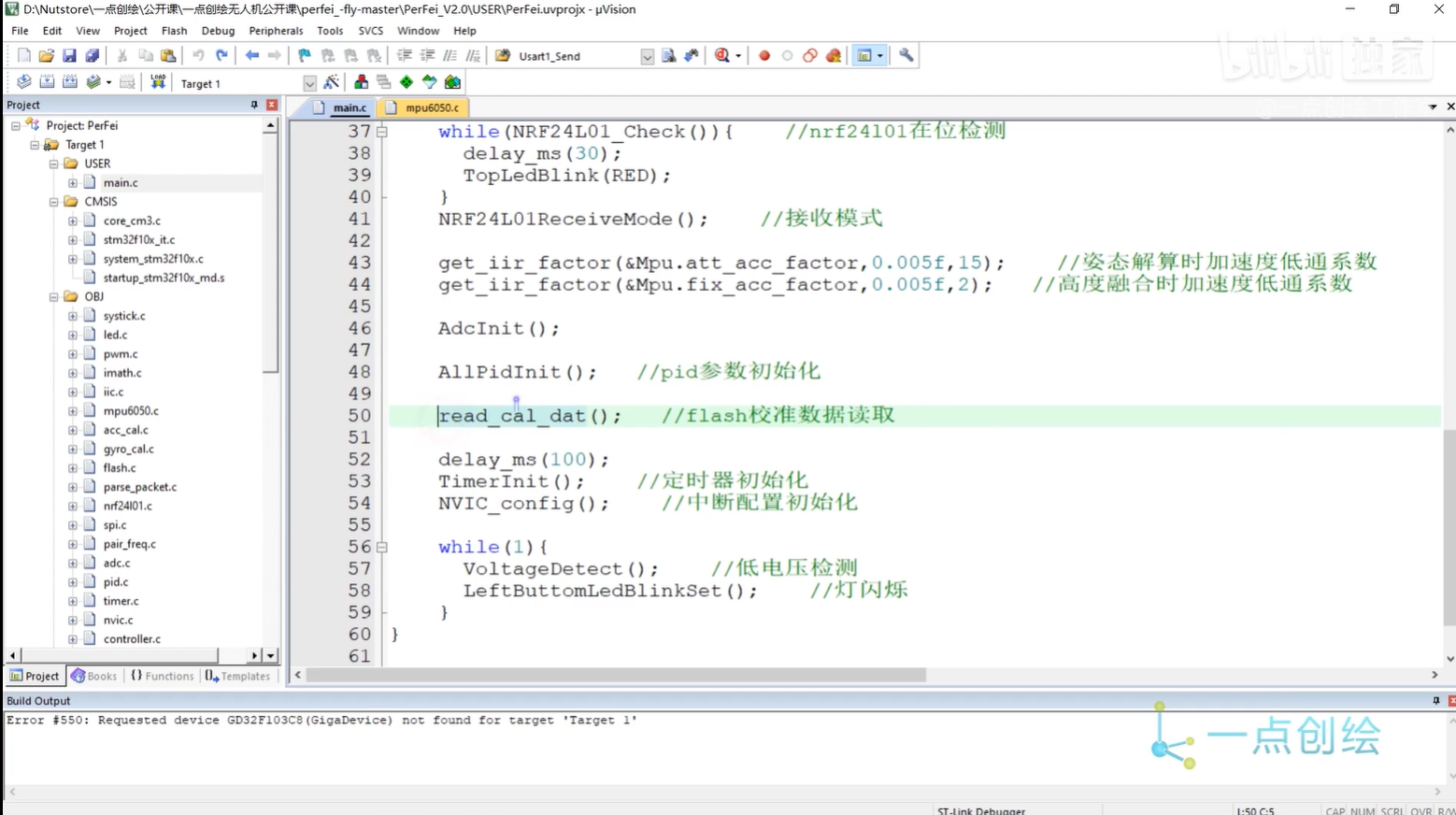
5. 单片机(软件部分)
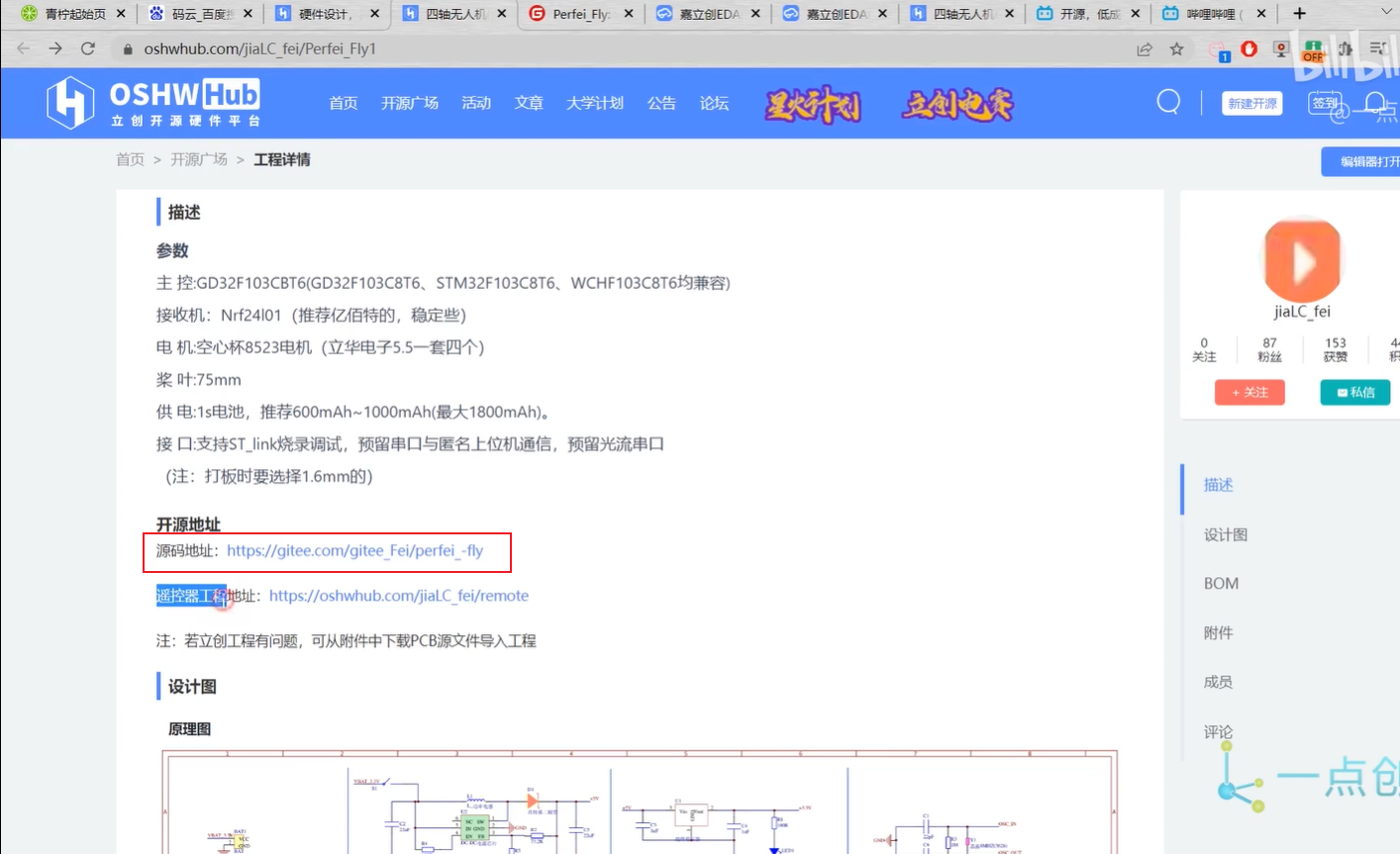
6. 获取免费开源项目

7. PCB设计
8. 代码部分
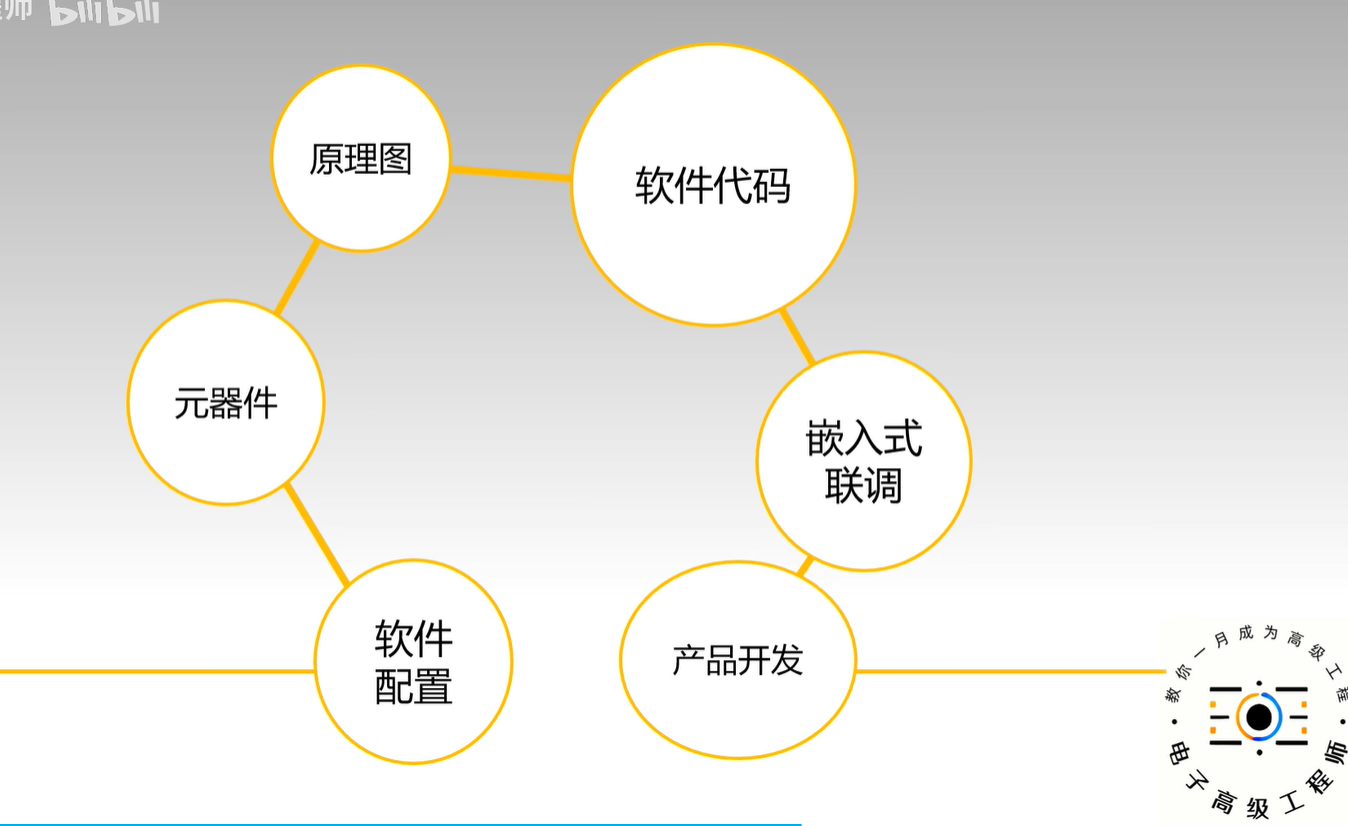
9. 开发流程图

 浙公网安备 33010602011771号
浙公网安备 33010602011771号