本人原创,转载请注明地址
学习udacity/CarND-Path-Planning-Project 工程过程
1.首先登陆
jeremy-shannon/CarND-Path-Planning-Project下载工程,如下图
2.在 https://github.com/udacity/self-driving-car-sim/releases/tag/T3_v1.2 下载仿真器,如下图
chmod -R 777 ./term_sim.x86_x64
用上面的命令执行term3_sim.x86_64,将该文件转化为可执行文件。
3.查看ubuntu系统中cmake make gcc版本 命令如:cmake --version
要求:cmake>=3.5
make>=4.1
gcc/g++>=5.4
若版本低于要求一定要先升级为要求版本
4.配置uWebSockets
(1)进入工程CarND-Path-Planning-Project-master
cd CarND-Path-Planning-Project-master
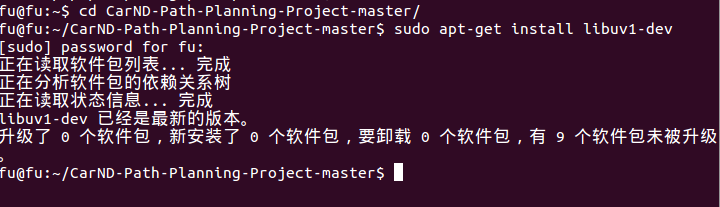
(2)按照下图命令执行
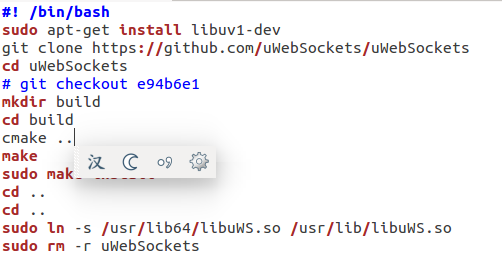
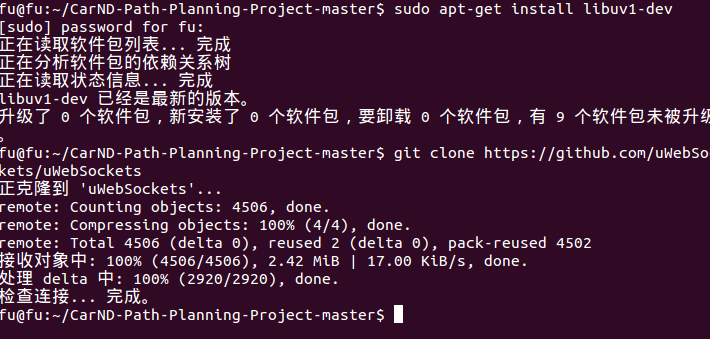
sudo apt-get install libuv1-dev
git clone https://github.com/uWebSockets/uWebSockets
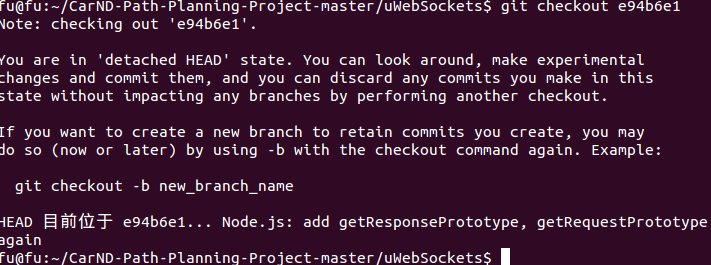
cd uWebSockets

git checkout e94b6e1
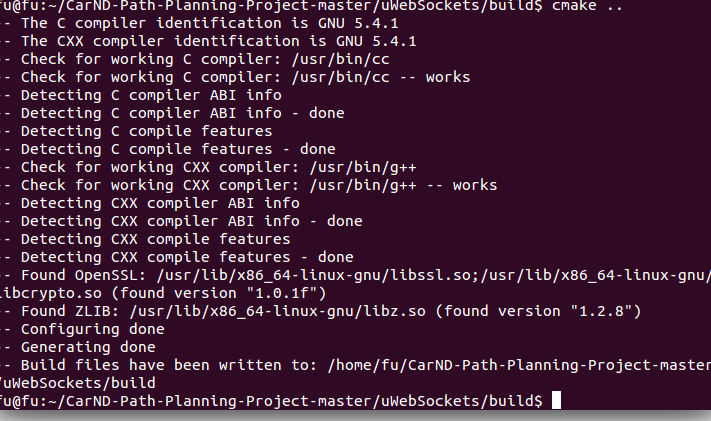
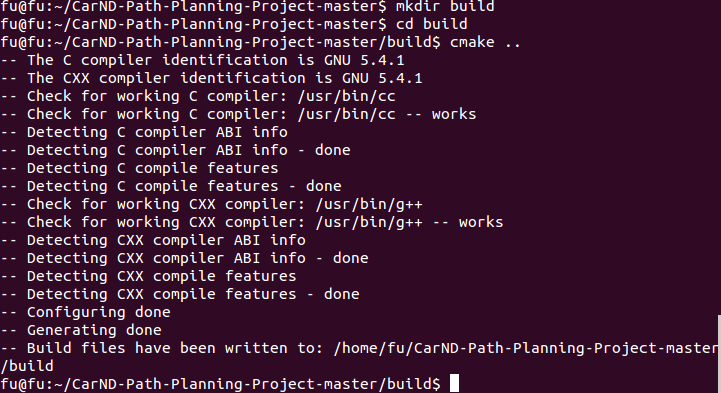
mkmir build cd build

cmake ..
注意:cmake后面加空格然后..
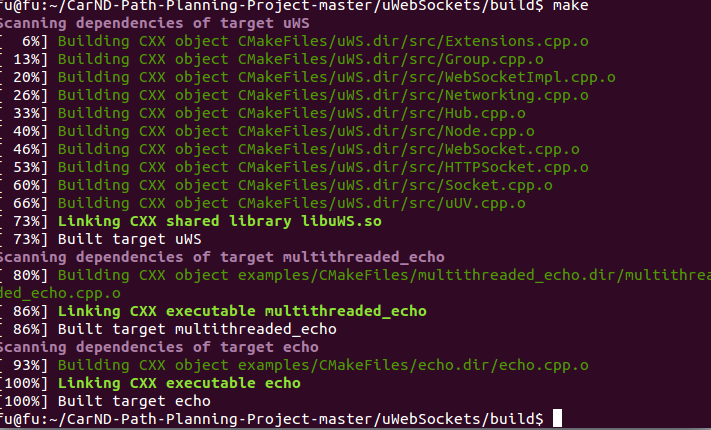
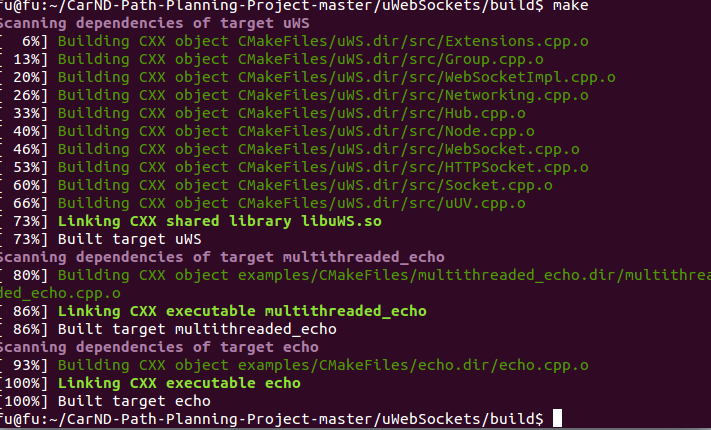
make
sudo make install
cd .. cd .. sudo ln -s /usr/lib64/libuWS.so /usr/lib/libuWS.so sudo rm -r uWebSockets

5.配置CarND-Path-Planning-Project
(1)进入工程CarND-Path-Planning-Project-master
(2)创建文件夹build,并进入文件夹
(3)执行cmake ..
(4)执行make 生成path_planning

(5)执行./path_planning

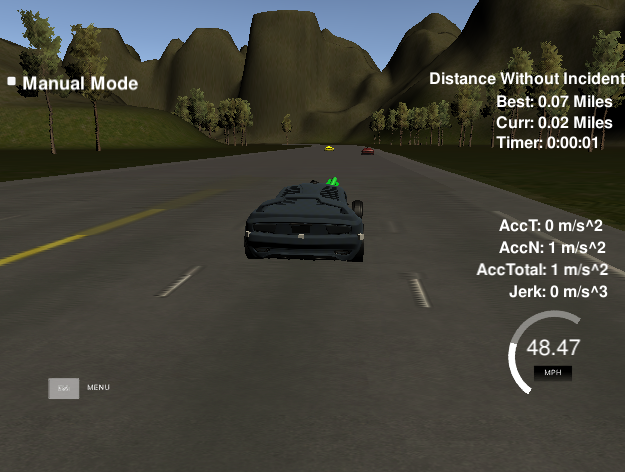
(6)双击打开term3_sim.x86_x64 单击select
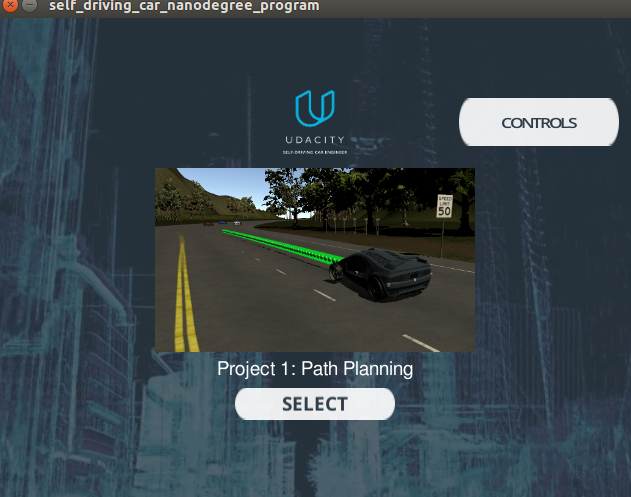
执行以上步骤整个pathplanning 系统就运行起来了

 浙公网安备 33010602011771号
浙公网安备 33010602011771号