从NMS谈起——实时ANMS
上一篇中讲到ANMS可以实现关键点在局部上的稀疏分布和全局上的均匀分布。然而由于时间复杂度太高,无法实时运行,因此不具备实用价值。
Approximate ANMS
为解决这一问题,学术界通过近似,提出了能够实时运行同时效果接近于ANMS的算法。这里对Efficient adaptive non-maximal suppression algorithms for homogeneous spatial keypoint distribution 中提出的SSC算法进行介绍
Suppression via Square Covering(SSC)
不同于ANMS算法直接算出每个点的最大响应距离,然后通过排序拿出指定的n个关键点。 SSC算法利用图像存储在空间上的离散性来加速这一过程。
它的基本流程如下图所示。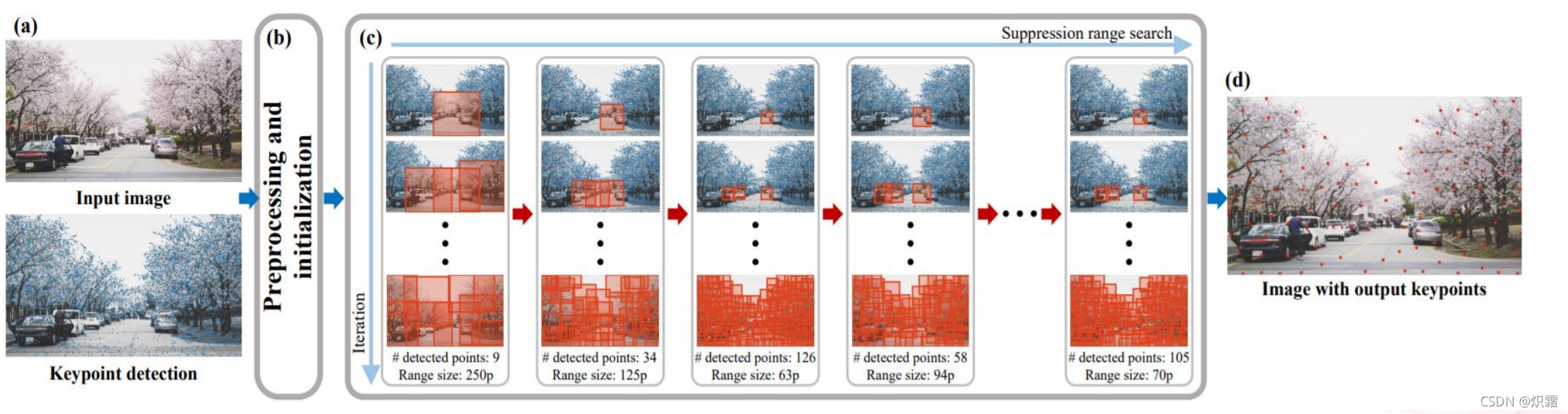
如图,SSC算法是一个迭代选取关键点以及试错逼近给定数量的过程。它的基本思想是先猜测一个响应距离d,然后以此为依据,依照响应度从大到小,拿出响应度最高且彼此相隔至少为d的m个关键点。通过使用与图像等大的mask,这里可以将时间复杂度降低为常数级。显然这m个关键点必然满足
r i = m i n ∣ ∣ x i − x j ∣ ∣ , s . t . r e s p o n s e ( x i ) < r e s p o n s e ( x j ) , x j ∈ S r_i =min||x_i-x_j||,s.t.response(x_i)<response(x_j),x_j \in S ri=min∣∣xi−xj∣∣,s.t.response(xi)<response(xj),xj∈S
即在范围d的区域中它的响应度最高。如果m<n,则缩小d到原来的1/2,再进行一次上面的过程。如果m>n,则增大d。这一过程是一个二分查找的过程。当 ∣ m − n ∣ < k |m-n|<k ∣m−n∣<k时,则停止这个流程,k为设置的误差阈值。此时输出的关键点满足ANMS算法的条件。
实际使用的过程中,往往只需要5~8次迭代就可以达到目标,1000个点在PC上耗时不到1ms。当然,实际上由于取关键点的过程中,计算距离并非严格使用欧式距离,SSC算法最终得到的点与ANMS有一些细微的不同。
代码及其他
SSC算法发表于2018年,代码可以在https://github.com/BAILOOL/ANMS-Codes找到,作者将其应用于SLAM中,获得了一定程度的提升。
另一方面SLAM是一个各个模块耦合较深的系统,传统的ORB-SLAM Bucketing方法已经深入人心,并且与它的模块互相作用,导致很难正确的评估和推广新的关键点分布算法了。
Reference
Bailo O, Rameau F, Joo K, et al. Efficient adaptive non-maximal suppression algorithms for homogeneous spatial keypoint distribution[J]. Pattern Recognition Letters, 2018, 106: 53-60.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号