


ardunio+舵机
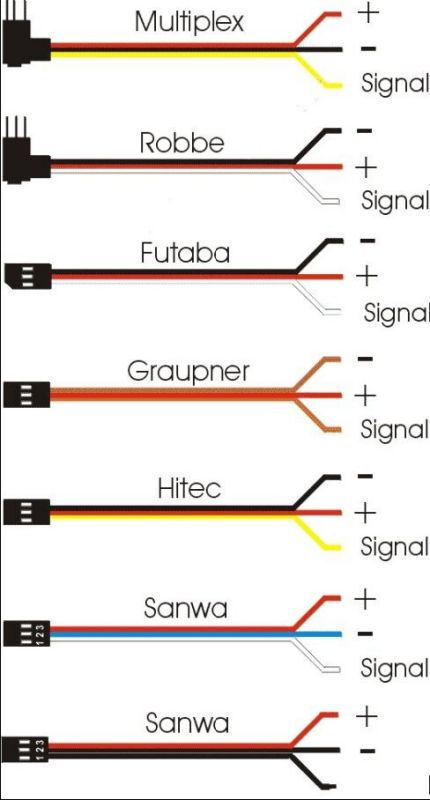
橙色信号线
红色正极 5V
棕褐色负极 GND
#include <Servo.h> Servo myServo; // 定义Servo对象来控制 int pos = 0; // 角度存储变量 void setup() { myServo.attach(4,500,2500); // 控制线连接数字4,设置脉冲范围为0.5ms~2.5ms } void loop() { for (pos = 0; pos <= 180; pos ++) { // 0°到180° // in steps of 1 degree myServo.write(pos); // 舵机角度写入 delay(15); // 等待转动到指定角度 } delay(3000);//延时3s for (pos = 180; pos >= 0; pos --) { // 从180°到0° myServo.write(pos); // 舵机角度写入 delay(15); // 等待转动到指定角度 } delay(5000);//延时3s }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号