STM32学习篇-跑马灯
一、工作目录
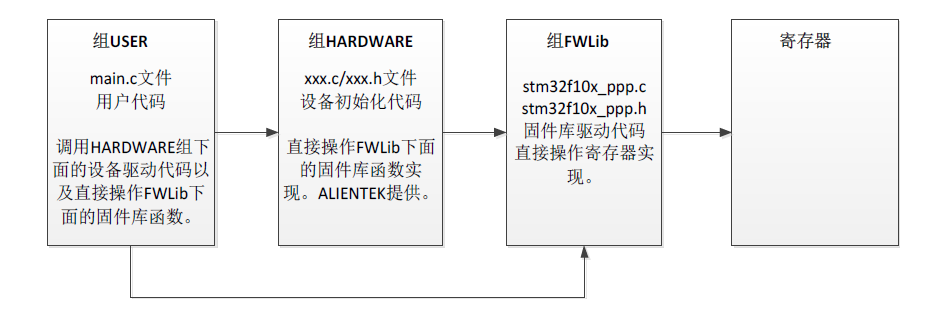
①USER:组USER中一般有main.c、stm32f10x_it.c、system_stm32f10x.c,主要用来编写main函数,存放的主要是用户代码,stm32f10x_it.c中主要用来定义部分中断服务函数,
System_stm32f10x.c主要定义SystemInit等时钟初始化函数
②HARDWARE:下面存放的是每个实验的外设驱动代码,他的实现是通过调用FWLib,下面的固件库文件实现的,比如led.c 里面调用stm32f10x_gpio.c 里面的函数对led 进行初始化,
这里面的函数是讲解的重点。后面的实验中可以看到会引入多个源文件。
③SYSTEM:组SYSTEM 是ALIENTEK 提供的共用代码,包含Systick 延时函数,IO 口位带操作以及串口相关函数
④CORE:组CORE 下面存放的是固件库必须的核心文件和启动文件。这里面的文件用户不需要修改
⑤FWLib:组FWLib 下面存放的是ST 官方提供的外设驱动固件库文件,这些文件大家可以根据工程需要来添加和删除。每个stm32f10x_ppp.c 源文件对应一个stm32f10x_ppp.h 头文件。
⑥README:README 分组主要就是添加了README.TXT 说明文件,对实验操作进行相关说明。
组之间的层次结构:
二、STM32的IO口
8种模式:
1、输入浮空
2、输入上拉
3、输入下拉
4、模拟输入
5、开漏输出
6、推挽输出
7、推挽式复用功能
8、开漏复用功能
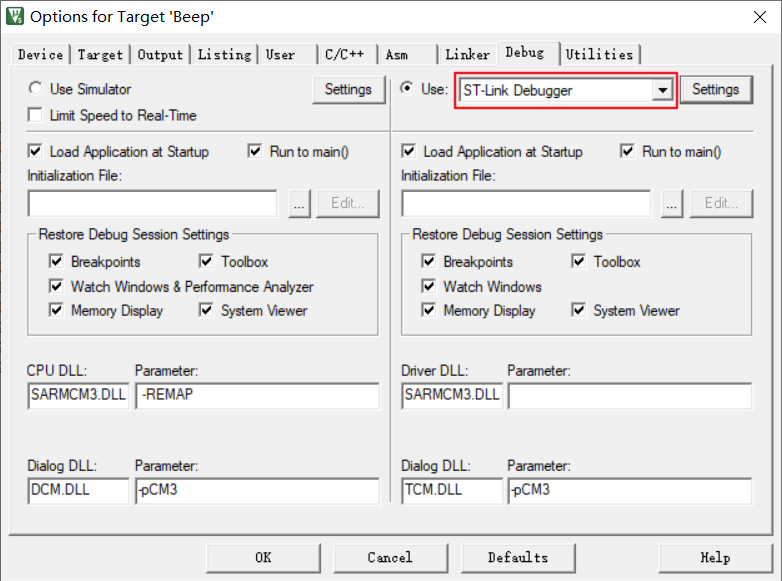
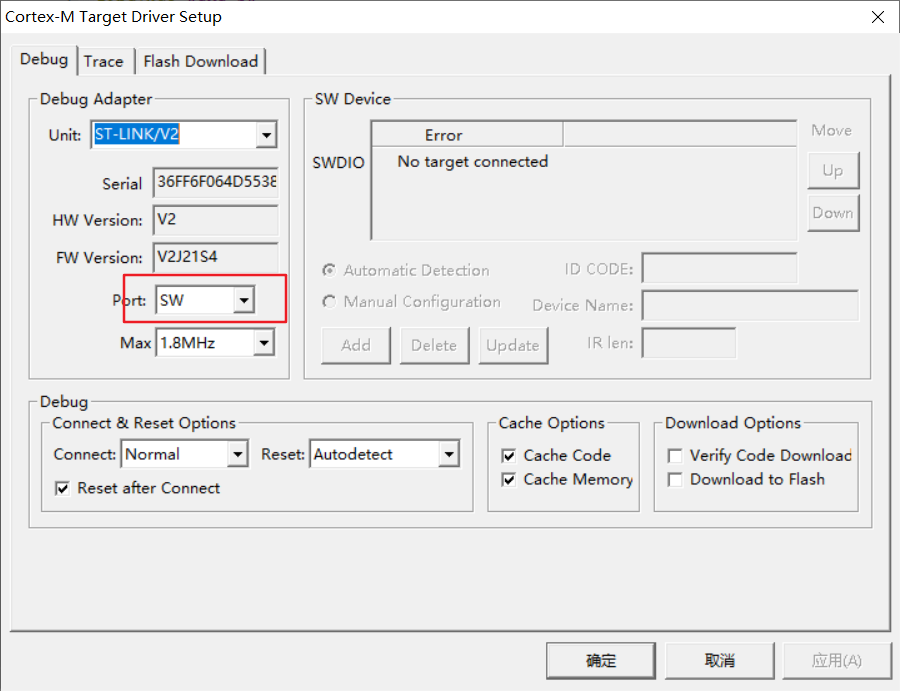
烧录程序的配置(使用ST-Link)
代码思路:先定义led灯的初始化函数,初始化IO口,设置IO口的输出输入模式,在main函数中调用初始化和延时函数,并设置灯的状态(1:亮,0:灭)
HARDWARE:
led.c:
#include "led.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_GPIOE, ENABLE); //使能PD,PE端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //LED0-->PB.6 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出,控制高低电平
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOD, &GPIO_InitStructure); //根据设定参数初始化GPIOD.6
GPIO_SetBits(GPIOD,GPIO_Pin_6); //PB.6 输出高
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //LED1-->PE.6 端口配置,推挽输出
GPIO_Init(GPIOE, &GPIO_InitStructure); //推挽输出,io速度为50MHz
GPIO_SetBits(GPIOE,GPIO_Pin_6); //PE.6 输出高
}
led.h:
#ifndef __LED_H
#define __LED_H
#include "sys.h"
// LED端口定义
#define LED0 PDout(6)// PD6
#define LED1 PEout(6)// PE6
void LED_Init(void);
#endif
main.c:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
int main(void)
{
delay_init(); //延时函数初始化
LED_Init(); //初始化与LED连接的硬件接口
while(1)
{
LED0 = 0;
LED1 = 1;
delay_ms(1000); //延时1s
LED0 = 1;
LED1 = 0;
delay_ms(1000); //延时1s
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号