3.三种简单的力
1.重力
万有引力定律:
$F = G \frac{m_1 m_2}{r^2}$
实际在模拟时使用的方程:
$F = mg$(m是物体质量,g为指向向下的常数矢量)
2.摩擦力
2.1静摩擦力
当两个物体相对静止时,阻止它们开始运动的摩擦力称为静摩擦力。
$f_s = \mu_s N$
$ \mu_s$:静摩擦系数
$N$:法向力的大小
2.2动摩擦力
当两个物体相对运动时,阻止它们继续相对运动的摩擦力称为动摩擦力。
$f_k = \mu_k N$
$ \mu_k$:动摩擦系数
$N$:法向力的大小
3.弹簧力
胡克定律:
$f_r = k(l_reset - l)$
$l_reset$:弹簧静止长度
$l$:弹簧当前的长度
$k$:弹簧常数
3.1非阻尼振荡运动方程
$x(t) = A \cos(\omega t + \theta_0)$
$\dot{x}(t)=-A\omega \sin(\omega t + \theta_0)$
$\ddot{x}(t)=-A\omega^2 \cos(\omega t + \theta_0)$
使用虚拟弹簧不需要考虑弹簧常数或者质量,更多的时候是关心频率,所以将方程做变形:
$x(t) = A \cos(2 \pi F t + \theta_0)$
这个方程是真实物理中不存在的情况,这种情况下弹簧将永远振荡
3.2阻尼振荡运动方程
现实中,至少还有两种力,一个是外力,一个是摩擦力,这些力的存在最终导致弹簧运动停止。
降低振荡系统振幅的效应的通用术语是阻尼。
阻尼力:与速度成正比,方向与速度相反:
$f_d = -c\dot{x}$
$f_d$:阻尼力的瞬时大小和方向
$\dot{x}$:瞬时速度
$c$:描述粘度,粗糙度等常数项
合力:
$f_{net} = f_r + f_d = -kx-c\dot{x}$
求加速度:
利用牛顿第二定律
$f = ma$
$a = \frac{f}{m}$
$\ddot{x} = f_{net}/m = -\frac{k}{m} x - \frac{c}{m} \dot{x}$
通过增加两个新量重写公式:
1.$\omega_0$:无阻尼角频率,$\omega_0 = \sqrt{\frac{k}{m}}$
2.$\zeta$:阻尼比,与阻尼系数,质量和无阻尼角频率有关,$\zeta = \frac{c}{2\sqrt{mk}} = \frac{c}{2m\omega_0}$
带入方程:
$\ddot{x} = -\omega_0^2x - 2\zeta\omega_0\dot{x}$
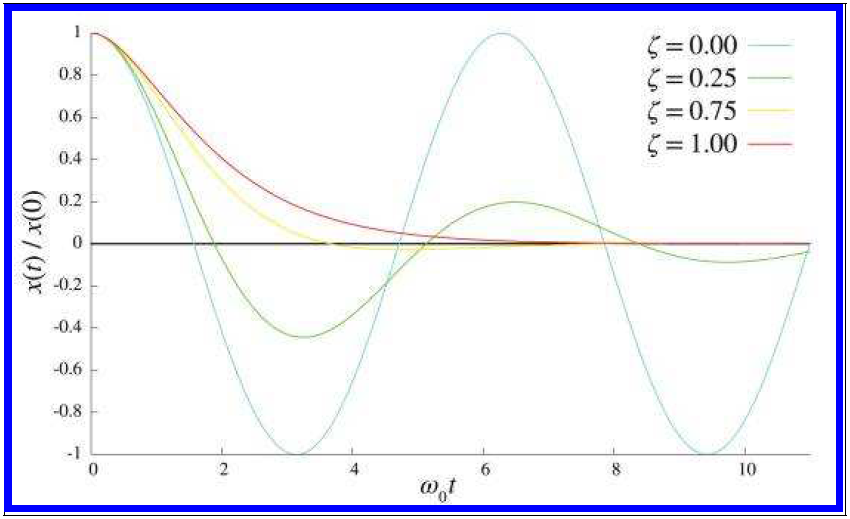
这个方程是带有常系数的二阶线性齐次微分方程,有三种不同情况:欠阻尼、临界阻尼和过阻尼。
二阶齐次微分方程求解如下:
$a\ddot{x}(t) + b\dot{x}(t) + cx(t) = 0$
1.提取特征二次方程:$at^2 + bt +c = 0$
2.求解根
$\sqrt{b^2-4ac}<0$无实根; $\sqrt{b^2-4ac}=0$两个相同根,$\sqrt{b^2-4ac}>0$ 两个根
如果有两个不同的实根:$\alpha$和$\beta$
$y = Ae^{\alpha x} + Be^{\beta x}$
如果只有一个实根$\alpha x$
$y = Ae^{\alpha x} + Be^{\alpha x}$
如果有两个复根,他们共轭,$\alpha \pm i\beta$
$y = e^{\alpha x}(A\cos({\beta x})+B\sin({\beta x}))$
将我们要求解的微分方程带入:
$\ddot{y} = -\omega_0^2y-2\zeta\omega_0\dot{y}$
$\ddot{y} +2\zeta\omega_0\dot{y} + \omega_0^2y = 0$
特征方程 $t^2 + 2\zeta\omega_0 t + \omega_0^2 = 0$
$\sqrt{b^2-4ac}$ = $\sqrt{4\zeta^2\omega_0^2 - 4\omega_0^2}$ = $2\omega_0^2\sqrt{\zeta^2-1}$
情况1:无实根时,$0\leq \zeta < 1$,$\alpha = -\frac{2\zeta\omega_0}{2}=-\zeta\omega$;$\beta = \frac{\sqrt{4\omega_0^2 - 4\zeta^2\omega_0^2}}{2} = \omega_0\sqrt{1-\zeta^2}$
带入$y = e^{\alpha x}(A\cos({\beta x})+B\sin({\beta x}))$
$y = e^{-\zeta\omega_0 x}(A\cos({\omega_0\sqrt{1-\zeta^2} x})+B\sin({\omega_0\sqrt{1-\zeta^2} x}))$
令$\omega_d = \beta = \omega_0\sqrt{1-\zeta^2} $
$y = e^{-\zeta\omega_0 x}(A\cos({\omega_d x})+B\sin({\omega_d x}))$
所以方程如下:
$x(t) = e^{-\zeta\omega_0 t}(A\cos({\omega_d t})+B\sin({\omega_d t}))$
$\dot{x}(t) = (-A\sin({\omega_d t})\omega_d + B\cos({\omega_d t})\omega_d)e^{-\zeta\omega_0 t} + (A\cos({\omega_d t}) + B\sin({\omega_d t}))e^{-\zeta\omega_0 t}*(-\zeta\omega_0)$
$x(0) = A$
$\dot{x}(0) = B\omega_d + Ae^0 * (-\zeta\omega_0) = B\omega_d - \zeta\omega_0\dot{x}(0)$
所以:$A = x(0) $$B = \frac{\zeta\omega_0x(0)+\dot{x}(0)}{\omega_d}$ A和B由初始位置和速度决定,在这种情况下,系统欠阻尼,运动无期限振荡,振幅会随着时间推移呈指数衰减。
情况2:$\zeta = 1$时,方程如下:
$\alpha = -\frac{2\zeta\omega_0}{2} = -\omega_0$
$y = Ae^{-\omega_0 x} + Bxe^{-\omega_0 x} = (A+Bx)e^{-\omega_0 x}$
所以:
$x(t) = Ae^{-\omega_0 t} + Bte^{-\omega_0 t} = (A+Bt)e^{-\omega_0 t}$
$\dot{x}(t) = Be^{-\omega_0 t} -\omega_0(A+Bt)e^{-\omega_0 t}$
$x(0) = A$
$\dot{x}(0) = B-\omega_0A = B-\omega_0x(0)$
$B = \omega_0x(0) + \dot{x}(0)$
所以:$A = x(0) B = \omega_0x(0) + \dot{x}(0)$,在这种情况下,振荡频率消失,称为临界阻尼的阈值,系统不再震荡,而是呈指数衰减。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号