
基于mykernel 2.0编写一个操作系统内核
1.构建并运行初始Linux系统内核
在Ubuntu的终端依次执行,如下命令。
wget https://raw.github.com/mengning/mykernel/master/mykernel-2.0_for_linux-5.4.34.patch sudo apt install axel axel -n 20 https://mirrors.edge.kernel.org/pub/linux/kernel/v5.x/linux-5.4.34.tar.xz xz -d linux-5.4.34.tar.xz tar -xvf linux-5.4.34.tar cd linux-5.4.34 patch -p1 < ../mykernel-2.0_for_linux-5.4.34.patch sudo apt install build-essential libncurses-dev bison flex libssl-dev libelf-dev make defconfig # Default configuration is based on 'x86_64_defconfig' make -j$(nproc) sudo apt install qemu # install QEMU qemu-system-x86_64 -kernel arch/x86/boot/bzImage
make编译成功后,可以看到如下输出:
启动成功后,可以在qemu窗口看到,如下输出打印信息。
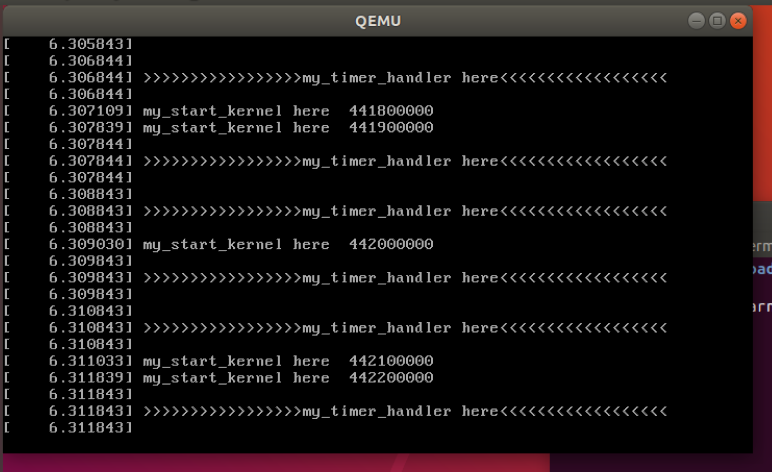
2.初始输出状态分析
此时的输出来自于,mymain.c和myinterrupt.c。
可以清楚地看到,my_start_kernel函数,会循环打印输出"my_start_kernel here %d"信息。
1 //mymain.c 2 void __init my_start_kernel(void) 3 { 4 int i = 0; 5 while(1) 6 { 7 i++; 8 if(i%100000 == 0) 9 pr_notice("my_start_kernel here %d \n",i); 10 } 11 }
my_timer_handler也会不断被时钟中断触发,而输出>>>>>>>>>>>>>>>>>my_timer_handler here<<<<<<<<<<<<<<<<<<
1 //myinterrupt.c 2 void my_timer_handler(void) 3 { 4 pr_notice("\n>>>>>>>>>>>>>>>>>my_timer_handler here<<<<<<<<<<<<<<<<<<\n\n"); 5 }
3.进程调度实现
1)添加pcb结构体
在mykernel路径下,创建一个mypcb.h文件。
具体代码以及各字段的含义如下,
1 #define MAX_TASK_NUM 4 2 #define KERNEL_STACK_SIZE 1024*2 3 /* CPU-specific state of this task */ 4 struct Thread { 5 unsigned long ip; //指令指针 6 unsigned long sp; //堆顶指针 7 }; 8 9 typedef struct PCB{ 10 int pid; //进程id 11 volatile long state; /*进程状态 -1 unrunnable, 0 runnable, >0 stopped */ 12 unsigned long stack[KERNEL_STACK_SIZE];//进程关联的栈 13 /* CPU-specific state of this task */ 14 struct Thread thread; //进程持有的线程 15 unsigned long task_entry; //进程执行任务入口 16 struct PCB *next; //指向下一个PCB的指针,所有PCB利用该指针形成一个循环单链表 17 }tPCB; 18 19 void my_schedule(void);
2)修改mymain.c的my_start_kernel函数
具体代码如下,
1 #include <linux/types.h> 2 #include <linux/string.h> 3 #include <linux/ctype.h> 4 #include <linux/tty.h> 5 #include <linux/vmalloc.h> 6 7 8 #include "mypcb.h" 9 10 tPCB task[MAX_TASK_NUM]; 11 tPCB * my_current_task = NULL; 12 volatile int my_need_sched = 0; 13 14 void my_process(void); 15 16 17 void __init my_start_kernel(void) 18 { 19 int pid = 0; 20 int i; 21 /* Initialize process 0*/ 22 task[pid].pid = pid; 23 task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */ 24 task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process; 25 task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1]; 26 task[pid].next = &task[pid]; 27 /*fork more process */ 28 for(i=1;i<MAX_TASK_NUM;i++) 29 { 30 memcpy(&task[i],&task[0],sizeof(tPCB)); 31 task[i].pid = i; 32 task[i].thread.sp = (unsigned long)(&task[i].stack[KERNEL_STACK_SIZE-1]); 33 task[i].next = task[i-1].next; 34 task[i-1].next = &task[i]; 35 } 36 /* start process 0 by task[0] */ 37 pid = 0; 38 my_current_task = &task[pid]; 39 asm volatile( 40 "movq %1,%%rsp\n\t" /* set task[pid].thread.sp to rsp */ 41 "pushq %1\n\t" /* push rbp */ 42 "pushq %0\n\t" /* push task[pid].thread.ip */ 43 "ret\n\t" /* pop task[pid].thread.ip to rip */ 44 : 45 : "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/ 46 ); 47 } 48 49 int i = 0; 50 51 void my_process(void) 52 { 53 while(1) 54 { 55 i++; 56 if(i%10000000 == 0) 57 { 58 printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid); 59 if(my_need_sched == 1) 60 { 61 my_need_sched = 0; 62 my_schedule(); 63 } 64 printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid); 65 } 66 } 67 }
此时my_start_kernel执行的功能是,创建0号进程以及其他进程,并将CPU运行控制权交付给0号进程。
其中创建进程代码较为直接,因此不予分析。只看一下交付CPU运行控制权的相关代码,即39-46L的汇编。
第40行:将0号进程持有线程的初始栈顶地址存入RSP寄存器中,此后所有的push和pop操作都是针对进程0的栈进行操作。
第41行:将进程0的当前栈顶地址压入栈中,因为此时栈为空栈,所以相当于压入栈底地址。
第42-43行:将进程0的初始指令地址压入栈中,并利用ret指令,将栈顶的初始指定地址出栈并赋给rip寄存器。
经过这四条指令,就可以从进程0的初始指令地址开始执行。
3)修改myinterrupt.c的my_timer_handler函数并实现具体的my_schedule调度函数
具体代码如下,
1 /* 2 * Called by timer interrupt. 3 * it runs in the name of current running process, 4 * so it use kernel stack of current running process 5 */ 6 void my_timer_handler(void) 7 { 8 if(time_count%1000 == 0 && my_need_sched != 1) 9 { 10 printk(KERN_NOTICE ">>>my_timer_handler here<<<\n"); 11 my_need_sched = 1; 12 } 13 time_count ++ ; 14 return; 15 } 16 17 void my_schedule(void) 18 { 19 tPCB * next; 20 tPCB * prev; 21 22 if(my_current_task == NULL 23 || my_current_task->next == NULL) 24 { 25 return; 26 } 27 printk(KERN_NOTICE ">>>my_schedule<<<\n"); 28 /* schedule */ 29 next = my_current_task->next; 30 prev = my_current_task; 31 if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */ 32 { 33 my_current_task = next; 34 printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid); 35 /* switch to next process */ 36 asm volatile( 37 "pushq %%rbp\n\t" /* save rbp of prev */ 38 "movq %%rsp,%0\n\t" /* save rsp of prev */ 39 "movq %2,%%rsp\n\t" /* restore rsp of next */ 40 "movq $1f,%1\n\t" /* save rip of prev */ 41 "pushq %3\n\t" 42 "ret\n\t" /* restore rip of next */ 43 "1:\t" /* next process start here */ 44 "popq %%rbp\n\t" 45 : "=m" (prev->thread.sp),"=m" (prev->thread.ip) 46 : "m" (next->thread.sp),"m" (next->thread.ip) 47 ); 48 } 49 return; 50 }
其中my_timer_handler函数的功能为周期性将my_need_sched置为1,标志进程需要进程调度。实际的调度代码为my_schedule函数。
该函数执行的具体任务为保存当前进程(prev)的上下文,并调出下一个进程(next)的上下文。核心代码为36L开始的汇编。
37L:将当前进程的栈底指针压入栈中,保存其状态。
38L:将rsp寄存器的值保存到prev->thread.sp中
39L:将rsp寄存器的值更新为下一进程的栈顶地址,实现进程操作栈的切换。
40L:将43行指令地址保存到当前进程持有线程的指令地址中。指定该进程重新被调入时,开始执行指令的位置。
41-42L:将下一进程的ip地址入栈并ret,从而来更新rip寄存器的值。如果下一进程之前运行过,此时rip寄存器的值便是之前保存的43L地址。
43L:将下一进程之前被调出时在37L保存的栈底地址出栈,赋值给rbp寄存器。
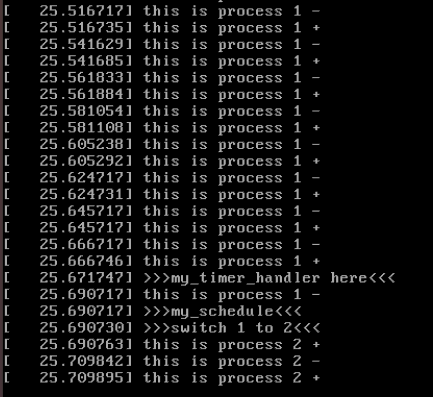
4)运行结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号