DDS信号发生器加强版(双通道,发送波形的频率可控,相位可控,种类可控)
目的:设计一个DDS,可以输出两个波形,输出的波形的周期可以修改,相位可以修改,种类也可以修改
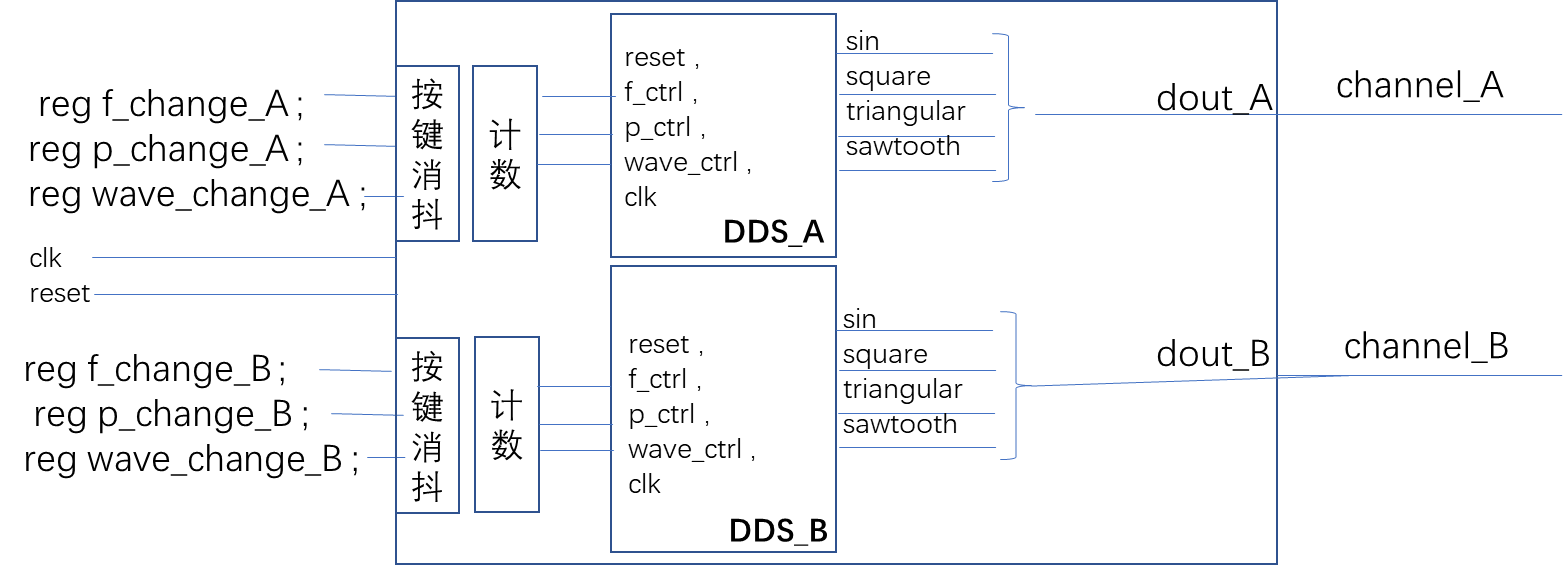
输入:clk,reset,一个控制T的按键,一个控制相位的按键,一个控制波形种类的按键。
思路:双通道——需要两个DDS。
波形种类可控——每个DDS需要四个ROM分别存放正弦波,三角波,锯齿波,方波。
频率可控——一个频率控制按钮,按一下切换一次频率,可供选择的频率是固定的,用计数器来设计。
相位可控——一个相位控制按钮,按一下切换一次相位,可供选择的相位是固定的,用计数器来设计。
有按钮——引入按键消抖模块,提高准确性。
可控——计数器+查找表 可以实现简单切换。(其他,如矩阵键盘等,后续)
建模:
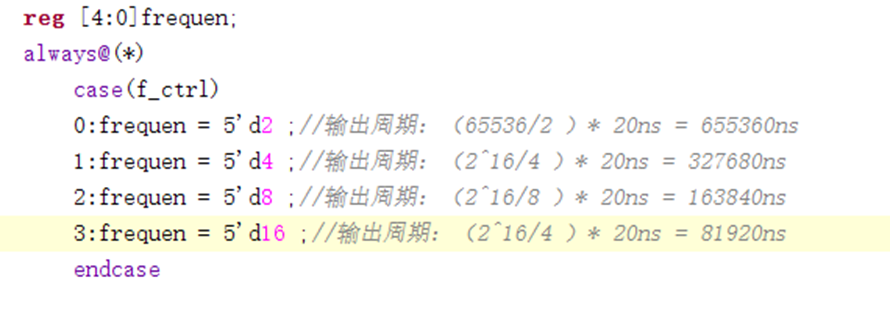
细节:输出波形的周期与频率控制的关系
ROM存储一个波形,而相位累加器的内存存储一个波形的离散点。一般来说相位累加器内存大于ROM。而取点间隔就是频率控制字。
比如ROM是十位【9:0】,而相位累加器是【15:0】,那么取点时相位累加器应该取高10位来ROM中取幅度,即【15:6】,这样子输出的波形的周期会随着频率控制字(即取点步长)的大小而改变。如果频率比较小(如2),那么取ROM中一个点要停留很多个系统时钟周期,且ROM中每个点都会被取到,输出的波形周期就长,如果频率比较大(如128),那么取ROM中一个点只停留一个系统时钟周期,且会跳过ROM中的某些点,输出的波形周期就短。
验证结果:
第一行:按键控制频率
第二行:按键控制波形

代码:
module DDS_advanced(
clk,
reset,
f_change_A,
f_change_B,
p_change_A,
p_change_B,
wave_change_A,
wave_change_B,
dout_A,
dout_B
);
input clk ;
input reset ;
input f_change_A ;
input f_change_B ;
input p_change_A ;
input p_change_B ;
input wave_change_A ;
input wave_change_B ;
output wire[9:0]dout_A ;
output wire[9:0]dout_B ;
reg [1:0]f_cnt_A ;//设置A通道的频率选择按钮的消抖,计数
wire tx_fA ;
wire f_change_A_sign ;
buttopn_debounde
#(
.delay(1000)
)
buttopn_debounde_fA (//消抖,取释放符号为+1信号
.clk(clk),
.tx(f_change_A),
.reset(reset),
.bd_tx(tx_fA),
.release_sign(f_change_A_sign)
);
always@(posedge clk or negedge reset)//计数
if (!reset)
f_cnt_A <= 2'd0 ;
else if(f_change_A_sign)
f_cnt_A <= f_cnt_A + 1'd1 ;
else
f_cnt_A <= f_cnt_A ;
reg [1:0]p_cnt_A ;//设置A通道的相位选择按钮的消抖,计数
wire tx_pA ;
wire p_change_A_sign ;
buttopn_debounde
#(
.delay(1000)
)
buttopn_debounde_pA (//消抖,取释放符号为+1信号
.clk(clk),
.tx(p_change_A),
.reset(reset),
.bd_tx(tx_pA),
.release_sign(p_change_A_sign)
);
always@(posedge clk or negedge reset)//计数
if (!reset)
p_cnt_A <= 2'd0 ;
else if(p_change_A_sign)
p_cnt_A <= p_cnt_A + 1'd1 ;
else
p_cnt_A <= p_cnt_A ;
reg [1:0]wave_change_cnt_A ;//设置A通道的波形选择按钮的消抖,计数
wire tx_wavea ;
wire wave_change_A_debounde_sign ;
buttopn_debounde
#(
.delay(1000)
)
buttopn_debounde_waveA (//消抖,取释放符号为+1信号
.clk(clk),
.tx(wave_change_A),
.reset(reset),
.bd_tx(tx_wavea),
.release_sign(wave_change_A_debounde_sign)
);
always@(posedge clk or negedge reset)//计数
if (!reset)
wave_change_cnt_A <= 2'd0 ;
else if(wave_change_A_debounde_sign)
wave_change_cnt_A <= wave_change_cnt_A + 1'd1 ;
else
wave_change_cnt_A <= wave_change_cnt_A ;
reg [1:0]f_cnt_B ;//设置B通道的频率选择按钮的消抖,计数
wire tx_fB ;
wire f_change_B_sign ;
buttopn_debounde
#(
.delay(1000)
)
buttopn_debounde_fB (//消抖,取释放符号为+1信号
.clk(clk),
.tx(f_change_B),
.reset(reset),
.bd_tx(tx_fB),
.release_sign(f_change_B_sign)
);
always@(posedge clk or negedge reset)//计数
if (!reset)
f_cnt_B <= 2'd0 ;
else if(f_change_B_sign)
f_cnt_B <= f_cnt_B + 1'd1 ;
else
f_cnt_B <= f_cnt_B ;
reg [1:0]p_cnt_B ;//设置B通道的相位选择按钮的消抖,计数
wire tx_pB ;
wire p_change_B_sign ;
buttopn_debounde
#(
.delay(1000)
)
buttopn_debounde_pB (//消抖,取释放符号为+1信号
.clk(clk),
.tx(p_change_B),
.reset(reset),
.bd_tx(tx_pB),
.release_sign(p_change_B_sign)
);
always@(posedge clk or negedge reset)//计数
if (!reset)
p_cnt_B <= 2'd0 ;
else if(p_change_B_sign)
p_cnt_B <= p_cnt_B + 1'd1 ;
else
p_cnt_B <= p_cnt_B ;
reg [1:0]wave_change_cnt_B ;//设置B通道的波形选择按钮的消抖,计数
wire tx_waveb ;
wire wave_change_B_debounde_sign ;
buttopn_debounde
#(
.delay(1000)
)
buttopn_debounde_waveB (//消抖,取释放符号为+1信号
.clk(clk),
.tx(wave_change_B),
.reset(reset),
.bd_tx(tx_waveb),
.release_sign(wave_change_B_debounde_sign)
);
always@(posedge clk or negedge reset)//计数
if (!reset)
wave_change_cnt_B <= 2'd0 ;
else if(wave_change_B_debounde_sign)
wave_change_cnt_B <= wave_change_cnt_B + 1'd1 ;
else
wave_change_cnt_B <= wave_change_cnt_B ;
DDS_Module channel_A(//A通道连线
.clk(clk) ,
.reset(reset) ,
.f_ctrl(f_cnt_A) ,
.p_ctrl(p_cnt_A) ,
.wave_ctrl(wave_change_cnt_A) ,
.dout(dout_A)
);
DDS_Module channel_B(//B通道连线
.clk(clk) ,
.reset(reset) ,
.f_ctrl(f_cnt_B) ,
.p_ctrl(p_cnt_B) ,
.wave_ctrl(wave_change_cnt_B) ,
.dout(dout_B)
);
endmodule
module DDS_Module(
clk ,
reset ,
f_ctrl ,
p_ctrl ,
wave_ctrl ,
dout
);
input clk ;
input reset ;
input [1:0]wave_ctrl ;
input [1:0]f_ctrl ;//(频率选择按钮)
input [1:0]p_ctrl ;
output reg [9:0]dout ;
reg [4:0]frequen;
always@(*)
case(f_ctrl)
0:frequen = 5'd2 ;//输出周期:(65536/2 )* 20ns = 655360ns
1:frequen = 5'd4 ;//输出周期:(2^16/4 )* 20ns = 327680ns
2:frequen = 5'd8 ;//输出周期:(2^16/8 )* 20ns = 163840ns
3:frequen = 5'd16 ;//输出周期:(2^16/4 )* 20ns = 81920ns
endcase
//频率控制字寄存器(频率)(大于1的时候,后面相位累加器输出到实时相位时要砍掉它的位宽)
reg [4:0]f_regist ;//(取值限制为2的倍数)
always @ (posedge clk)
f_regist <= frequen ;
//相位累加器 (f * t)
reg [15:0]p_add ;
always@(posedge clk or negedge reset )
if(!reset )
p_add <= 0 ;
else
p_add <= p_add + f_regist ;
reg [9:0]phase_cv;
always@(*)
case(p_ctrl)
0:phase_cv = 10'd128 ;//45°
1:phase_cv = 10'd256 ;//90°
2:phase_cv = 10'd512 ;//135°
3:phase_cv = 10'd640 ;//180°
endcase
//相位控制字寄存器(初始相位)(相位偏移量)
reg [9:0]p_regist ;
always @ (posedge clk)
p_regist <= phase_cv ;
//实时相位
reg [9:0]p_now ;
always@(posedge clk or negedge reset )
if(!reset )
p_now <= 0 ;
else
p_now <= p_add[15:6] + p_regist ; //取相位累加器的前10位
wire [9:0]wave_sin ;
wire [9:0]wave_square ;
wire [9:0]wave_triangular;
wire [9:0]wave_sawtooth;
always@(*)//波形选择
case(wave_ctrl)
0: dout = wave_sin ;
1: dout = wave_triangular ;
2: dout = wave_square ;
3: dout = wave_sawtooth ;
endcase
rom_sin rom_sin(//正弦波
.clka(clk),
.addra(p_now),
.douta(wave_sin)
);
rom_triangular rom_triangular(//三角波
.clka(clk),
.addra(p_now),
.douta(wave_triangular)
);
rom_square rom_square(//方波
.clka(clk),
.addra(p_now),
.douta(wave_square)
);
rom_sawtooth rom_sawtooth(//锯齿波
.clka(clk),
.addra(p_now),
.douta(wave_sawtooth)
);
endmodule
module buttopn_debounde(
clk,
tx,
reset,
bd_tx,
release_sign
);
input tx ;
input clk ;
input reset ;
output reg bd_tx ;
output reg release_sign ;//按下释放信号
reg [1:0]edge_detect_regist;
always@(posedge clk or negedge reset)//输入信号的移位寄存器
begin
if (!reset)
edge_detect_regist <= 2'd0 ;
else
begin
edge_detect_regist[0] <= tx ;
edge_detect_regist[1] <= edge_detect_regist[0] ;
//等效于 edge_detect_regist <={ edge_detect_regist[0] , tx }
end
end
wire neg_edge , pos_edge ;
assign neg_edge = ( edge_detect_regist == 2'b10 ) ? 1 : 0 ;//下降沿
assign pos_edge = ( edge_detect_regist == 2'b01 ) ? 1 : 0 ;//上升沿
parameter delay = 20000000 / 20 ;//抖动20ms
reg [3:0]state ;
reg [19:0]counter1 ;
always@(posedge clk or negedge reset)
begin
if (!reset)
state <= 4'd0 ;//空闲态
else if ( ( neg_edge ) && ( state == 4'd0 ) )
state <= 4'd1 ;//按下消抖态
else if ( ( state == 4'd1 ) && (( delay - 1) > counter1 ) && ( pos_edge ) )
state <= 4'd0 ;//空闲态
else if ( ( state == 4'd1 ) && (( delay - 1) <= counter1 ) )
state <= 4'd2 ;//按下态
else if ( ( pos_edge ) && ( state == 4'd2 ) )
state <= 4'd3 ;//释放消抖态
else if ( ( state == 4'd3 ) && (( delay - 1) > counter1 ) && ( neg_edge ) )
state <= 4'd2 ;//按下态
else if ( ( state == 4'd3 ) && (( delay - 1) <= counter1 ) )
state <= 4'd0 ;//空闲态
end
always@(posedge clk or negedge reset)
begin
if (!reset)
counter1 <= 5'd0 ;
else if ( ( neg_edge ) || ( pos_edge ) )
counter1 <= 5'd0 ;
else if ( ( state == 4'd1 ) && (! neg_edge ) && (! pos_edge ) )
counter1 <= counter1 + 1'd1 ;
else if ( ( state == 4'd3 ) && (! neg_edge ) && (! pos_edge ) )
counter1 <= counter1 + 1'd1 ;
end
always@(posedge clk or negedge reset)
begin
if (!reset)
bd_tx <= 1'd1 ;//空闲态
else
case(state)
0:bd_tx <= 1'd1 ;
1:bd_tx <= 1'd1 ;
2:bd_tx <= 1'd0 ;
3:bd_tx <= 1'd0 ;
endcase
end
reg pre_sign ;
always@(posedge clk or negedge reset)
begin
if (!reset)
pre_sign <= 1'd1 ;//空闲态
else if( ( state == 4'd1 ) && (( delay - 1) <= counter1 ) )
pre_sign <= 1'd0 ;
else if ( state == 4'd2 )
pre_sign <= 1'd1 ;
end
always@(posedge clk or negedge reset)
begin
if (!reset)
release_sign <= 1'd0 ;//空闲态
else if( ( state == 4'd3 ) && (( delay - 1) <= counter1 ) )
release_sign <= 1'd1 ;
else if ( state == 4'd0 )
release_sign <= 1'd0 ;
end
endmodule
`timescale 1ns / 1ps
module DDS_advanced_tb(
);
reg clk ;
reg reset ;
reg f_change_A ;
reg f_change_B ;
reg p_change_A ;
reg p_change_B ;
reg wave_change_A ;
reg wave_change_B ;
wire [9:0]dout_A ;
wire [9:0]dout_B ;
DDS_advanced DDS_advanced_sim(
clk,
reset,
f_change_A,
f_change_B,
p_change_A,
p_change_B,
wave_change_A,
wave_change_B,
dout_A,
dout_B
);
initial clk = 1 ;
always #10 clk = ! clk ;
initial
begin
reset = 0 ;
f_change_A = 1 ;
f_change_B = 1 ;
p_change_A = 1 ;
p_change_B = 1 ;
wave_change_A = 1 ;
wave_change_B = 1 ;
#201 ;
reset = 1 ;
#90000 ;
wave_change_A = 0 ;
#910000 ;
wave_change_A = 1 ;
f_change_B = 0 ;
#910000 ;
f_change_B = 1 ;
wave_change_A = 0 ;
#910000 ;
wave_change_A = 1 ;
f_change_B = 0 ;
#910000 ;
f_change_B = 1 ;
wave_change_A = 0 ;
#910000 ;
f_change_B = 0 ;
wave_change_A = 1 ;
#910000 ;
f_change_B = 1 ;
wave_change_A = 0 ;
#910000 ;
f_change_B = 0 ;
wave_change_A = 1 ;
#910000 ;
f_change_B = 1 ;
#910000 ;//验证波形和频率控制
reset = 0 ;//验证相位控制
#201 ;
reset = 1 ;
p_change_B = 0 ;
f_change_A = 0 ;
f_change_B = 0 ;
#200
f_change_A = 1 ;
f_change_B = 1 ;
#910000 ;
p_change_B = 1 ;
#910000 ;
p_change_B = 0 ;
#910000 ;
p_change_B = 1 ;
#910000 ;
p_change_B = 0 ;
#910000 ;
p_change_B = 1 ;
#910000 ;
p_change_B = 0 ;
#910000 ;
p_change_B = 1 ;
#910000 ;
$stop;
end
endmodule

 浙公网安备 33010602011771号
浙公网安备 33010602011771号