树套树
-
-
算法训练营6.4
-
-
简介:
-
名称:树套树
-
本质:一个节点为另一种树形结构(也可以是自己)的树形结构。
-
一些abstract:我们用平衡树实现过查询过一棵树中的第k小,但是没有做到查询某一个区间的第k小,更不用说带动态修改的区间第k小了。如果不要求在线处理,cdq可以解决动态区间第k小,但是在线的话需要用树套树。
树套树指在一个树形数据结构上,每个节点不再是一个节点,而是另一种树形结构,最常见的树套树有线段树套线段树、线段树套平衡树、树状数组套平衡树,尝试做到两个数据结构的功能的并集。
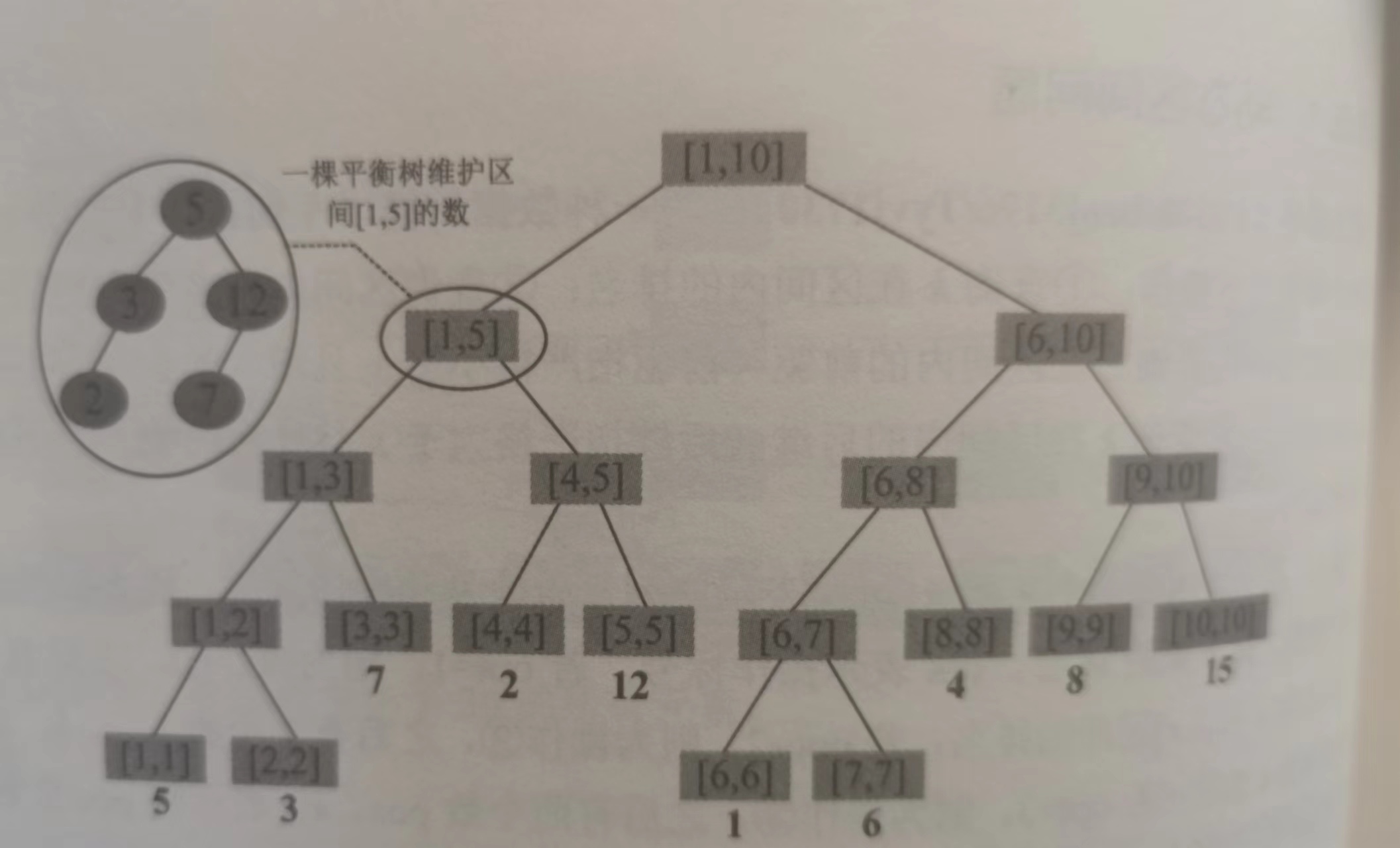
以线段树套平衡树为例:线段树可以用来点、区间更新以及查询;平衡树可以用来查询第k小、排名、前驱和后继。我们用线段树维护区间,再用平衡树维护区间中的动态修改。先构造出线段树,每个线段树的节点除了记录左右边界,还用一棵平衡树维护这一个区间中的所有数,具体见例子,
-
-
例题:
-
(P3380/bzoj3196/Tyvj1730)要求维护一个有序数列,需要支持:
-
查询k在区间内的排名
-
查询区间内排名为k的值
-
修改某一个位置上的数值
-
查询k在区间内的前驱(最大的严格小于x的数,若不存在输出-2147483647)
-
查询k在区间内的后继(最小的严格大于x的数,若不存在输出2147483647)
区间操作和动态更新,所以可以用线段树+平衡树解决。
-
算法设计:
为线段树的每个节点都开辟一棵和区间大小相同的平衡树,平衡树一般用Treap或伸展树。线段树的每一层区间包含的元素个数都为n(因为每一层都是整个区间拆开的结果,然后每个节点都有一棵区间长度大小的平衡树,所以相当于又合了起来)。至多有logn层,于是所有的平衡树的节点总数是nlogn的。此树套树如图所示:
![]()
-
算法实现:
-
创建线段树和平衡树。
先创建线段树,然后每个节点的区间数据都插入该节点对应的平衡树中。
void build(int x, int l, int r) {
a[x].root = 0;
for (int i = l; i <= r; i++) {
a[x].insert(a[x].root, p[i]);
}
if (l == r) return;
int mid = l + r >> 1;
build(x << 1, l, mid);
build(x << 1 | 1, mid + 1, r);
} -
查询k在[ql, qr]之间的排名(最后别忘了+1):
在线段树中执行区间查询,把每个线段树节点中的平衡树中的排名加起来再加1就是最终排名。
int queryrank(int x, int l, int r, int ql, int qr, int k) { // 当前节点为x,其左右界限为[l, r],查询区间为[ql, qr],查询k的排名
if(l > qr || r < ql) return 0; // 不相交
if (ql <= l && r <= qr) { // 完全被查询包括
return a[x].rank(a[x].root, k); // 拿到[l, r]中比k小的个数
}
int ans = 0, mid = l + r >> 1;
ans += queryrank(x << 1, l, mid, ql, qr, k);
ans += queryrank(x << 1 | 1, mid + 1, r, ql, qr, k);
return ans;
}线段树查询最多O(logn)层,平衡树查询最多O(logn)层,所以时间复杂度是O(loglog)的。
-
查询[ql, qr]区间排名为k的值。
区间内的元素是无序的,所以不能按区间查询排名。而用值进行二分搜索(初始l和r分别是总共的极小和极大值),每次查询这个值的排名,看看和k比较一下。
int queryval(int ql, int qr, int k) {
int l = min_val, r = max_val, ans = -1, rank;
while(l <= r) {
mid = l + r >> 1;
rank = queryrank(1, 1, n, ql, qr, mid);
if (rank + 1 <= k) { // 如果排名已经为k,则还可以变大,l也是要mid + 1
ans = mid;
l = mid + 1;
} else {
r = mid - 1;
}
}
return ans;
}复杂度为O(lognlognlog(max-min))。
-
点更新:
修改pos位置上的数为k。与线段树的点更新差不多,外加要更新每个节点对应的平衡树,最后修改p[pos] = k。
void modify(int x, int l, int r, int pos, int k) {
if (pos < l || pos > r) return; // 不在这个范围内
a[x].remove(a[x].root, p[pos]); // 先删除这个值
a[x].insert(a[x].root, k); // 再插入新值
if (l == r) return;
int mid = l + r >> 1;
modify(x << 1, l, mid, pos, k);
modify(x << 1 | 1, mid + 1, r, pos, k);
}线段树中查询O(logn)层,删除和插入的复杂度为O(logn),总复杂度为O(lognlogn)。
-
查询k在[ql, qr]区间的前驱:
若查询区间和当前节点的无交集,返回-inf;若查询区间覆盖了当前节点,则在当前节点平衡树中查找前驱;否则在左右子树中搜索,分别求前驱。
int querypre(int x, int l, int r, int ql, int qr, int k) {
if (l > qr || r < ql) return -inf; // 不相交
if (ql <= l && r <= qr) return a[x].pre(a[x].root, k); // 完全覆盖在整个平衡树中查找前驱
int mid = l + r >> 1;
int ans = -inf;
ans = max(ans, querypre(x << 1, l, mid, ql, qr, k));
ans = max(ans, querypre(x << 1 | 1, mid + 1, r, ql, qr, k));
return ans;
}线段树一共O(logn)层,查询复杂度也是O(logn),所以总时间复杂度为O(lognlogn)。
-
查询k在[ql, qr]区间的后继:
基本同上:
int querynxt(int x, int l, int r, int ql, int qr, int k) {
if (l > qr || r < ql) return inf; // 不相交
if (ql <= l && r <= qr) return a[x].nxt(a[x].root, k); // 完全覆盖在整个平衡树中查找后继
int mid = l + r >> 1;
int ans = inf;
ans = min(ans, querynxt(x << 1, l, mid, ql, qr, k));
ans = min(ans, querynxt(x << 1 | 1, mid + 1, r, ql, qr, k));
return ans;
}总时间复杂度O(lognlogn)。
-
-
-
(POJ1195)矩形区域查询。二维的点更新和区间查询。因为只有点更新,所以之前用二维树状数组解决过,这里用线段树套线段树解决。
线段树一共有O(n)个节点,每个节点又有一个O(n)节点的线段树,所以空间复杂度为O(n^2)的。查询、更新操作总时间复杂度为O(lognlogn)的。
-
数据结构定义:创建一维线段树和二维线段树节点
struct node_y { // 第二维线段树节点,用来维护纵坐标的和
int l, r; // 纵坐标的区间
int sum; // 和值
};
struct node_x { // 第一维线段树节点,维护二维区间的和
int l, r; // 横坐标的区间
node_y s[maxn << 2]; // 第二维线段树
}tr[maxn << 2]; -
创建树套树:不同于一维的,需要多一个参数,代表为哪个一维线段树节点创建二维线段树
void build_y(int i, int l, int r, int k) { // i为二维节点,代表[l, r]区间,k为一维线段树节点
tr[k].s[i].l = l;
tr[k].s[i].r = r;
tr[k].s[i].sum = 0; // 原题初始化就全是0
if (l == r) return;
int mid = l + r >> 1;
build_y(i << 1, l, mid, k);
build_y(i << 1 | 1, mid + 1, r, k);
}
void build_x(int i, int l1, int r1, int l2, int r2) { // i为一维线段树节点,[l1, r1]是一维的范围,[l2, r2]是二维的范围,但这里[l2, r2]只能是[1, y_max]
tr[i].l = l1;
tr[i].r = r1;
build_y(1, l2, r2, i);
if (l1 == r1) return;
int mid = l1 + r1 >> 1;
build_x(i << 1, l, mid, l2, r2);
build_x(i << 1 | 1, mid + 1, r, l2, r2);
} -
点更新:
void update_y(int i, int y, int val, int k) { // k是一维节点序号,i是二维节点序号 val是要加的值 y是要改的纵坐标
tr[k].s[i].sum += val;
if (tr[k].s[i].l == tr[k].s[i].r) return;
int mid = (tr[k].s[i].l + tr[k].s[i].r) >> 1;
if (y <= mid) update_y(i << 1, y, val, k);
else update_y(i << 1 | 1, y, val, k);
}
void update_x(int k, int x, int y, int val) { // k是一维节点序号,(x, y)是坐标,+val
update_y(1, y, val, k); // 对k节点的整棵树进行点更新
if (tr[k].l == tr[k].r) return;
int mid = tr[k].l + tr[k].r >> 1;
if (x <= mid) update_x(k << 1, x, y, val);
else update_x(k << 1 | 1, x, y, val);
} -
区间查询:
int query_y(int i, int l, int r, int k) {
if (tr[k].s[i].l == l && tr[k].s[i].r == r) return tr[k].s[i].sum;
int mid = (tr[k].s[i].l + tr[k].s[i].r) >> 1;
if (r <= mid) return query_y(i << 1, l, r, k);
else if (l > mid) return query_y(i << 1 | 1, l, r, k);
else return query_y(i << 1, l, mid, k) + query_y(i << 1 | 1, mid + 1, r, k);
}
int query_x(int k, int l1, int r1, int l2, int r2) { // 查询区间[l1, r1][l2, r2]
if (tr[k].l == l1 && tr[k].r == r1) return query_y(1, l2, r2, k);
int mid = tr[k].l + tr[k].r >> 1;
if (r1 <= mid) return query_x(k << 1, l1, r2, l2, r2);
else if (l > mid) return query_x(i << 1 | 1, l1, r2, l2, r2);
else return query_x(k << 1, l1, r2, l2, r2) + query_x(i << 1 | 1, l1, r2, l2, r2);
}
-
-
(HDU4819)点更新 & 区间查询(最大值和最小值)
所有二维的最小值的最小值是一维的最小值,所以可以树套树。
-
数据结构定义:
struct node {
int Max, Min;
}tr[maxn << 1][maxn << 1]; // 第i维就是处理i维坐标 -
建树:
void pushup_x(int i, int k) { // 1-i2-k
tr[k][i].Max = max(tr[k << 1][i].Max, tr[k << 1 | 1][i].Max);
tr[k][i].Min = min(tr[k << 1][i].Min, tr[k << 1 | 1][i].Min);
}
void pushup_y(int i, int k) { // 1-i2-k
tr[k][i].Max = max(tr[k][i << 1].Max, tr[k][i << 1 | 1].Max);
tr[k][i].Min = min(tr[k][i << 1].Min, tr[k][i << 1 | 1].Min);
}
void build_y(int i, int k, int l, int r, int flag) { // i第二维坐标;k第一维坐标;处理第二维的[l, r];flag == 1代表横坐标区间已经是一个点了,此时不用管儿子,flag == 2表示横坐标仍然是一个区间,这时要根据儿子的答案取父亲的答案
int mid, val;
if (l == r) {
if (flag == 1) {
scanf("%d", &val);
tr[k][i].Max = tr[k][i].Min = val;
} else {
pushup_x(i, k);
}
return;
}
mid = (l + r) >> 1;
build_y(i << 1, k, l, mid, flag);
build_y(i << 1 | 1, k, mid + 1, r, flag);
}
void build_x(int k, int l, int r) {
if (l == r) {
build_y(1, k, 1, n, 1); // 整棵树都要建,已经为叶子节点,flag == 1
return;
}
int mid = l + r >> 1;
// 一方面处理更小的竖着的矩形
build_x(k << 1, l, mid);
build_x(
-
-