陀螺仪-MPU6050
陀螺仪-MPU6050
MPU6050 简介
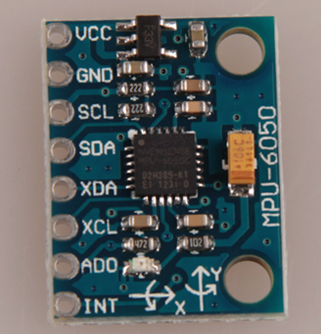
YH-MPU6050 是野火科技推出的六轴传感器模块,见图2-1,它采用 InvenSense 公司的 MPU6050 作为主芯片, 能同时检测三轴加速度、三轴陀螺仪(三轴角速度)的运动数据以及温度数据。利用 MPU6050 芯片内部的 DMP 模块(Digital Motion Processor 数字运动处理器), 可对传感器数据进行滤波、融合处理,直接通过 IIC 接口向主控器输出姿态解算后的数据,降低主控器的运算量。其姿态解算频率最高可达 200Hz, 非常适合用于对姿态控制实时要求较高的领域。常见应用于手机、智能手环、四轴飞行器、计步器等的姿态检测。
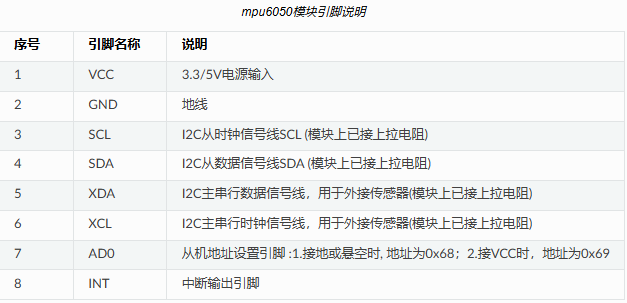
MPU6050模块的引脚功能说明
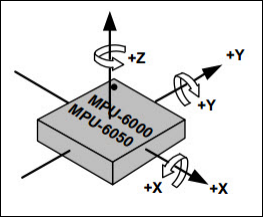
MPU6050传感器的坐标及方向
由于MPU6050检测时是基于自身中心坐标系的,见图2 - 3,它表示的坐标系及旋转符号标出了MPU6050传感器的XYZ轴的加速度有角速度的正方向。所以在安装模块时,您需要考虑它与所在设备的坐标系统的关系。
MPU6050的寄存器定义
MPU6050有各种各样的寄存器用于控制工作模式,我们把这些寄存器的地址、寄存器位使用宏定义到了 mpu6050.h 文件中了,代码如下。
//模块的A0引脚接GND,IIC的7位地址为0x68,若接到VCC,需要改为0x69
#define MPU6050_SLAVE_ADDRESS (0x68<<1) //MPU6050器件读地址
#define MPU6050_WHO_AM_I 0x75
#define MPU6050_SMPLRT_DIV 0 //8000Hz
#define MPU6050_DLPF_CFG 0
#define MPU6050_GYRO_OUT 0x43 //MPU6050陀螺仪数据寄存器地址
#define MPU6050_ACC_OUT 0x3B //MPU6050加速度数据寄存器地址
// ... 这里省略了很多MPU6050的寄存器宏定义
// ... ...
初始化MPU6050芯片
/**
* @brief 初始化MPU6050芯片
* @param
* @retval
*/
void MPU6050_Init(void)
{
int i=0,j=0;
//在初始化之前要延时一段时间,若没有延时,则断电后再上电数据可能会出错
for(i=0;i<1000;i++)
{
for(j=0;j<1000;j++)
{
;
}
}
MPU6050_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00); //解除休眠状态
MPU6050_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07); //陀螺仪采样率
MPU6050_WriteReg(MPU6050_RA_CONFIG , 0x06);
MPU6050_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x01); //配置加速度传感器工作在2G模式
MPU6050_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
}
读传感器ID
初始化后,可通过读取它的“WHO AM I”寄存器内容来检测硬件是否正常,该寄存器存储了ID号0x68,见代码如下。
/**
* @brief 读取MPU6050的ID
* @param
* @retval 正常返回1,异常返回0
*/
uint8_t MPU6050ReadID(void)
{
unsigned char Re = 0;
MPU6050_ReadData(MPU6050_RA_WHO_AM_I,&Re,1); //读器件地址
if (Re != 0x68) {
MPU_ERROR("检测不到MPU6050模块,请检查模块与开发板的接线");
return 0;
} else {
MPU_INFO("MPU6050 ID = %d\r\n",Re);
return 1;
}
}
读取原始数据
若传感器检测正常,就可以读取它数据寄存器获取采样数据了,见代码如下
/**
* @brief 读取MPU6050的加速度数据
* @param
* @retval
*/
void MPU6050ReadAcc(short *accData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取MPU6050的角加速度数据
* @param
* @retval
*/
void MPU6050ReadGyro(short *gyroData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取MPU6050的原始温度数据
* @param
* @retval
*/
void MPU6050ReadTemp(short *tempData)
{
u8 buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值
*tempData = (buf[0] << 8) | buf[1];
}
/**
* @brief 读取MPU6050的温度数据,转化成摄氏度
* @param
* @retval
*/
void MPU6050_ReturnTemp(float*Temperature)
{
short temp3;
u8 buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值
temp3= (buf[0] << 8) | buf[1];
*Temperature=((double) (temp3 /340.0))+36.53;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号