步进电机-DRV8825
zz :控制简述:cpu 发送不同频率的pwm给STEP/STP引脚,DRV8825,输出A1、A2、B1、B2,控制相位变化
DRV8825步进电机驱动
DRV8825是一款电机驱动芯片,为打印机,扫描仪和其他自动化设备应用提供了集成的电机驱动器解决方案,它具有两个H桥驱动器和一个微步进分度器,用于驱动双极步进电机。DRV8825能够从每个输出驱动高达2.5 A的电流。
DRV8825的特点
- 适合驱动8.2V~45V 2.5A一下的步进电机;
- 只有简单的步进和方向控制接口;
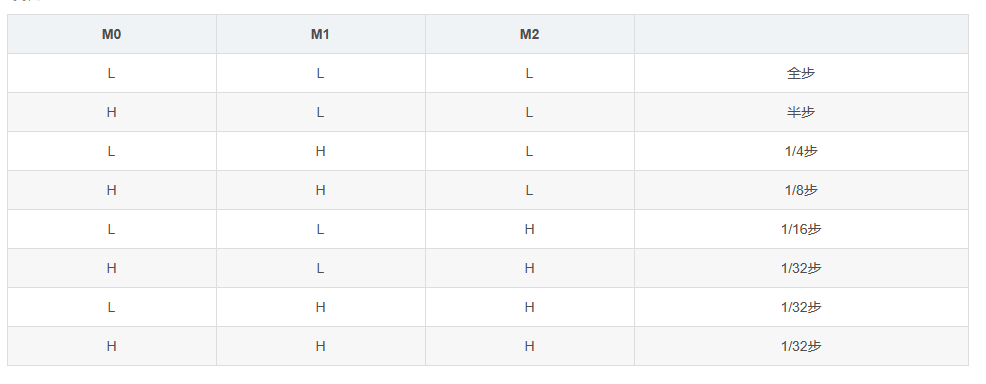
- 六个不同的步进模式: 全步、半步、1/4步、1/8步、1/16步、1/32步;
- 自带电位器可调节电流输出,从而获得更高的步进率
- 自动电流衰减模式检测/选择;
- 过热关闭电路,欠压锁定,交叉电流保护。
- 相对于4988的特点优势
- 驱动电流高达2.5A
- 支持最大32细分
- 4层PCB板,散热良好
- 芯片内阻更小,发热低,散热性好
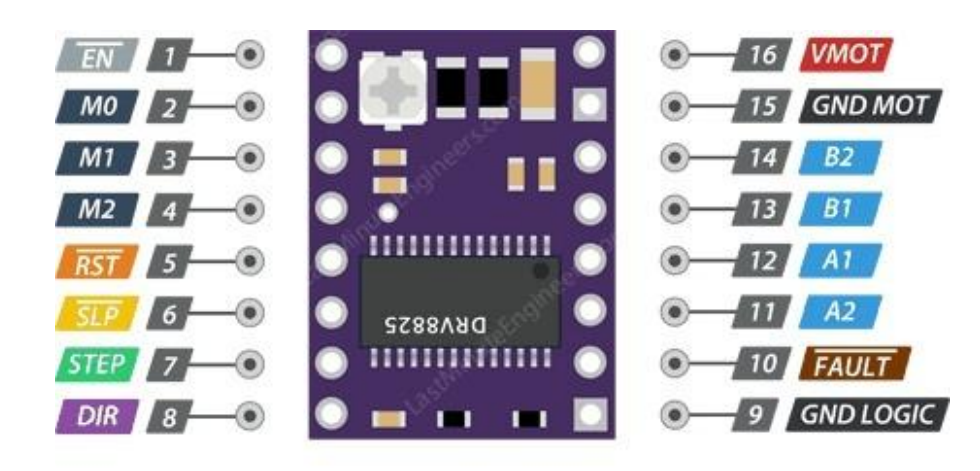
引脚说明
|
vmot 和 GND MOT |
为电动机提供电源接口,可输入8.2V 至 45V; |
|
M0、M1、M2 |
细分逻辑电平输入引脚,可根据上表输入相应的逻辑电平调节电机的步进角; |
|
|
|
DIR, |
控制电机转动方向的引脚,在该引脚输入高电平,电机顺时针旋转;输入低电平,电机逆时针旋转 |
|
STEP/STP |
控制电机转动的脉冲输入引脚,输入脉冲的频率越高,电机的旋转速度越快; |
|
SLP, |
该引脚控制驱动的睡眠模式,低电平有效,当把该引脚拉低时驱动器 进入睡眠模式; |
|
RST, |
复位引脚,低电平有效 |
|
EN, |
使能引脚,低电平有效,当给该引脚输入低电平时驱动器使能,默认 情况下,此引脚被拉低,因此驱动器始终处于使能状态 |
|
FAULT, |
用于过流保护或热关断,当禁用H桥FET时,该引脚输出低电平 |
|
A1、A2、B1、B2 |
为接电机的输出引脚 |
Arduino配合DRV8825驱动步进电机
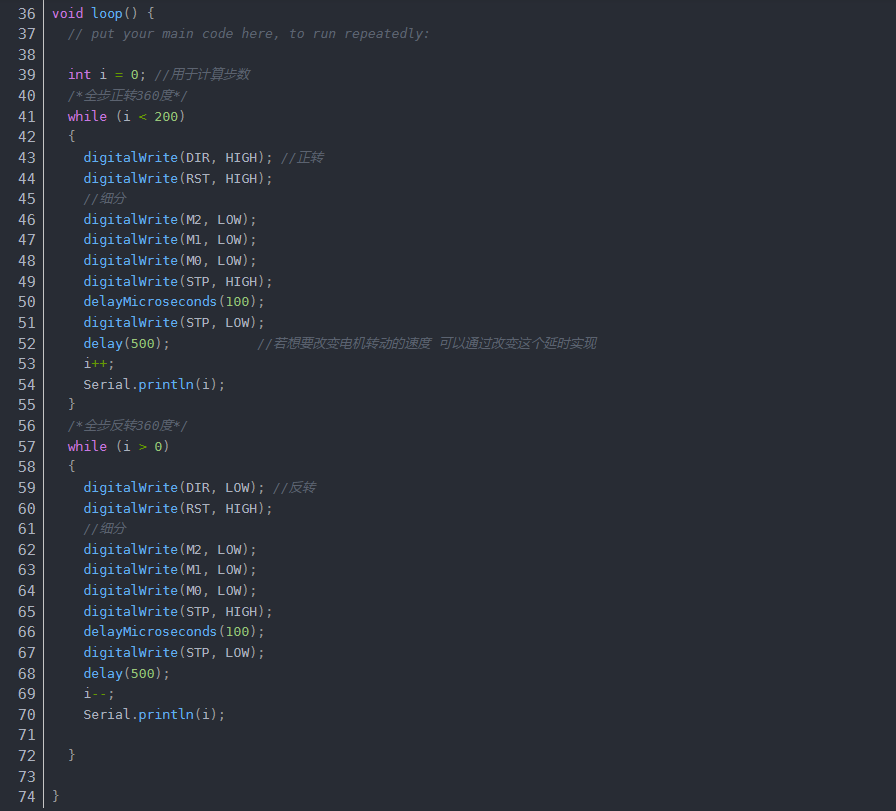
本次实验实现步进电机在“全步”模式下一步一步清楚的顺时针走一圈接着逆时针走一圈。
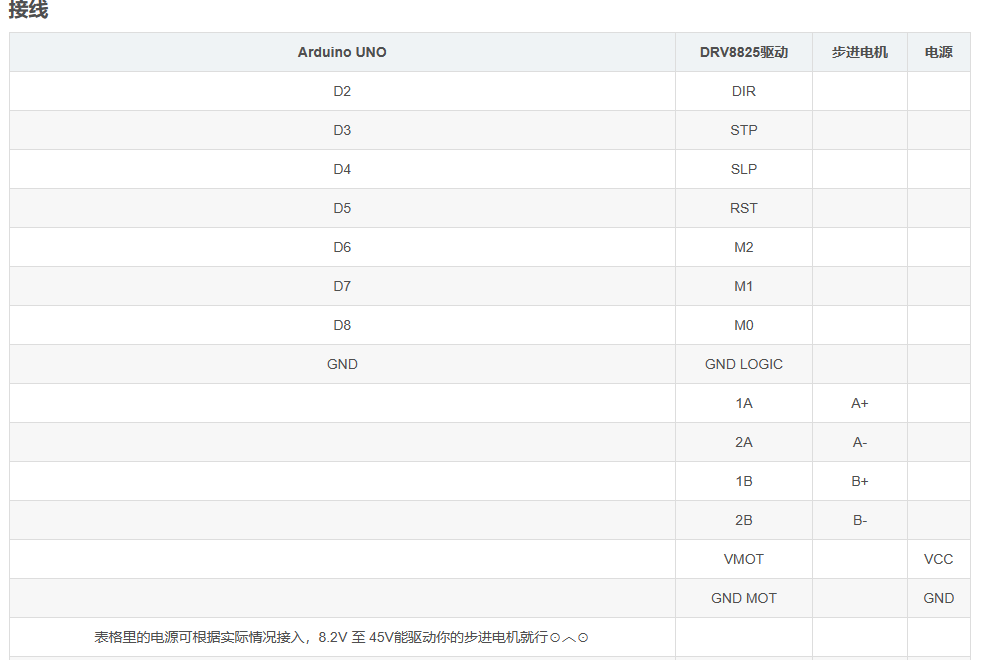
表格里的电源可根据实际情况接入,8.2V 至 45V能驱动你的步进电机就行⊙︿⊙
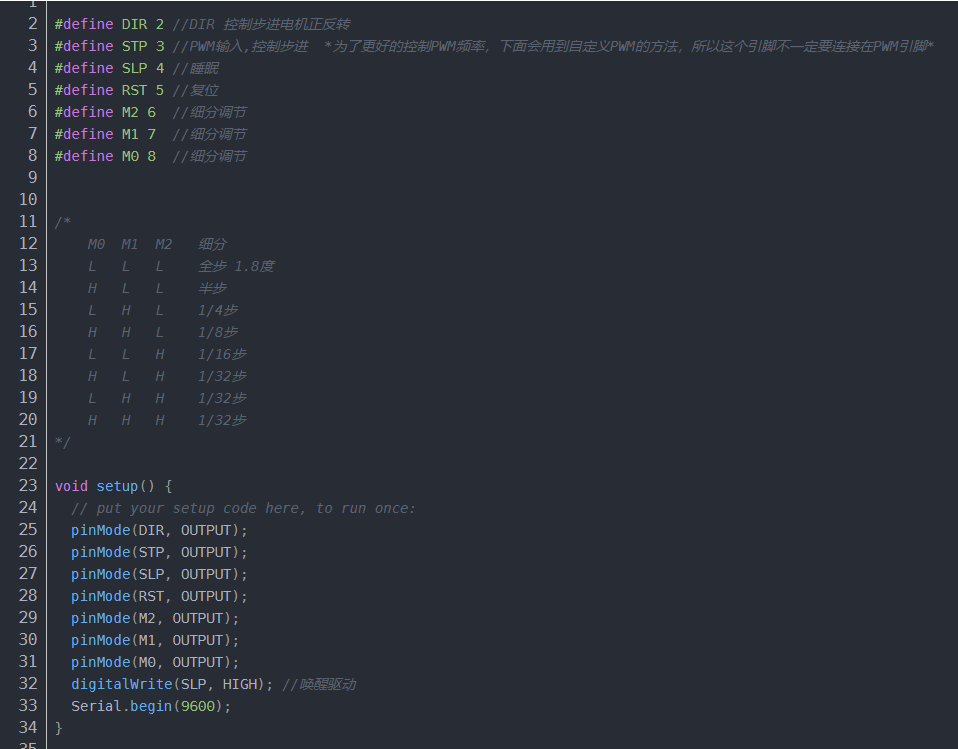
实验代码

 浙公网安备 33010602011771号
浙公网安备 33010602011771号