周末宅在家的结果---位恣整定
先声明本人大学非电子类专业的,仅仅是懂而以。
一直想做自平衡控制系统的实验,可惜没空。先
做了个位恣整定的实验。位恣指的是物体所处的空间
姿态,如飞机沿各个轴旋转的角度。实验用的控制器是
ardunio,陀螺仪用的是 L3G4200D用来测量角速度,通过
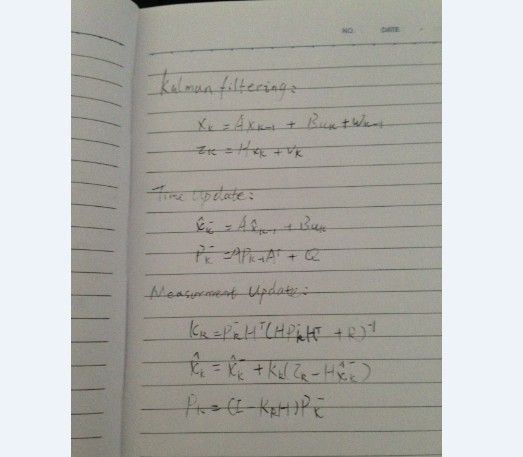
对角速度积分得到旋转的角度,用卡尔曼滤波器进行误差
修正。卡尔曼滤波器在各种飞行器上得到广泛的应用,如
预测卫星下一时刻轨道位置。




 浙公网安备 33010602011771号
浙公网安备 33010602011771号