SyncBus:让多台设备“齐舞”,告别协同烦恼
SyncBus:让多台设备“齐舞”,告别协同烦恼
还在为多台设备调度不同步、易碰撞、难管理而头疼吗?
无论是文旅演艺中的灯光与舞美、工厂里的AGV车队,还是展馆中的智能导览,多机协同一直是行业里的技术难点。传统方案要么太“笨”,改个动作要大动干戈;要么太“脆”,网络一断全场瘫痪。
SyncBus 就是为解决这些问题而生——它是一个分布式多机协同控制系统,致力于让多台设备像一支训练有素的舞团,无需复杂编程,即可实现精准、可靠、灵活的协同作业。
行业痛点:为什么多机协同这么难?
在多数需要设备协作的场景中,常见的方案存在明显短板:
| 场景 | 常见做法 | 面临的问题 |
|---|---|---|
| 文旅演艺 | PLC编程 + 人工对时 | 动作调整繁琐,设备一多容易失序,彩排成本高 |
| 工厂物流 | 中央服务器集中调度 | 单点故障风险高,网络波动可能导致全线停摆 |
| 展馆互动 | 定时器 + 脚本 | 无法实时响应观众或环境变化,缺乏容错机制 |
| 无人车队 | 单车自主导航 | 缺乏全局协同,多车相遇易发生死锁或碰撞 |
行业普遍现状:
- 高度依赖中心化控制,一旦“大脑”故障,系统即陷入瘫痪
- 时间同步严重受制于网络质量,设备间容易“各走各的”
- 轨迹冲突多靠人工预先编排,缺乏实时检测与动态调整能力
- 缺少直观的可视化监控,问题定位困难,运维效率低
SyncBus 能做什么?
SyncBus 提供一套统一平台,覆盖三大典型协同场景:
四大核心能力,直击协同要害
1. 分布式时钟同步:断网也不“掉拍子”
传统系统依赖网络持续对时,网络抖动就会导致动作错乱。
SyncBus 采用脉冲同步机制:
- Director 节点定期广播同步脉冲
- 各 Agent 接收脉冲,校准本地时钟
- 断网自持模式:网络中断后,Agent 依靠本地高精度时钟继续执行任务,网络恢复后自动重同步,演出或作业不中断。
2. 智能轨迹规划:自动避让,告别“撞车”
告别人工排期和碰撞风险。
SyncBus 内置:
- A* 路径规划 + 动态避让算法
- 冲突预检:运行前扫描所有设备轨迹,提前预警潜在碰撞
- 死锁检测与解除:智能识别长时间冲突,并提供解卡建议
3. 语义化剧本驱动:像写清单一样编排动作
无需编程基础,业务人员也能快速上手。
- 采用易懂的 YAML 格式编写“剧本”,接近自然语言
- 支持移动、旋转、摇摆、编队、跟随等十几种动作类型
- 支持角色映射(Cast):同一套剧本可灵活分配给不同型号的设备执行
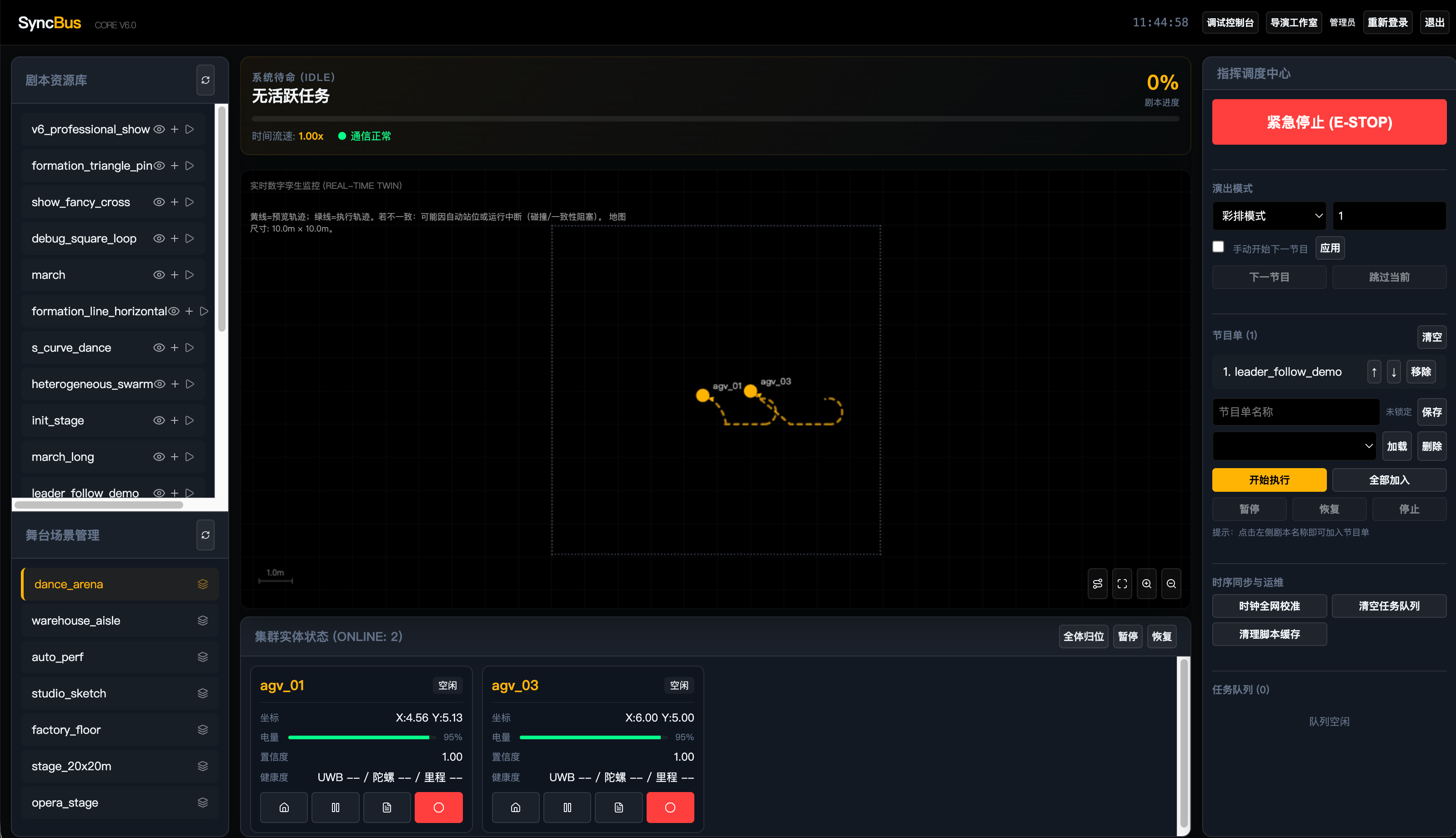
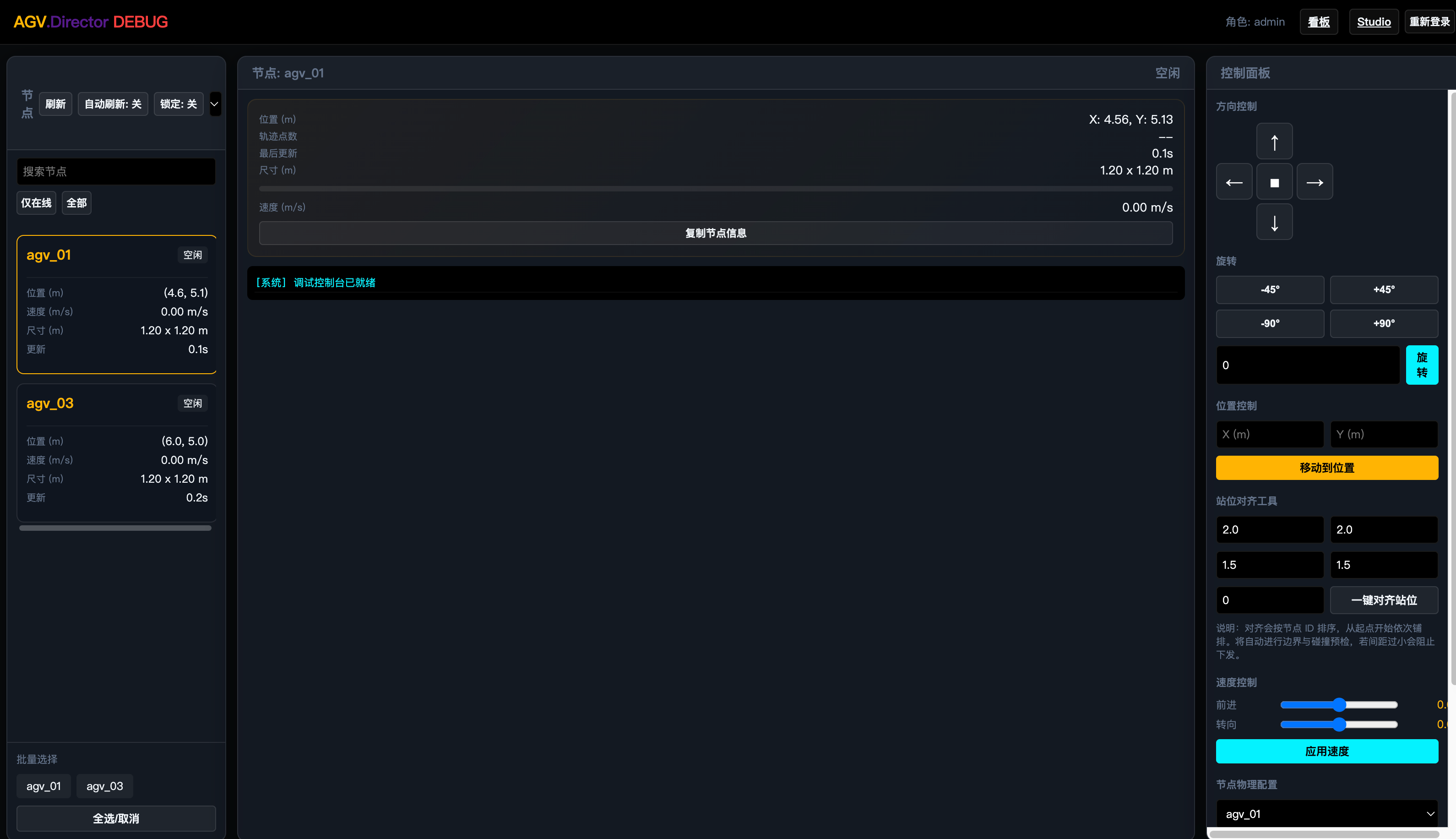
4. 实时数字孪生:运行状态一目了然
在虚拟世界中预先看到真实世界的运行。
- Web 监控大屏实时展示所有设备位置、速度、状态
- 轨迹预览:执行前虚拟预演,确保动作符合预期
- 异常报警:碰撞风险、设备离线、电量不足等情况实时推送告警
技术架构:稳定可靠的后盾
SyncBus 采用 Director-Agent 分布式架构,兼顾集中调度的便利与分布式系统的鲁棒性。
关键指标:
- 同步精度:< 50ms(可配置)
- 断网自持:支持,恢复后自动重同步
- 支持节点数:16+(可扩展)
- 规划响应:< 200ms(10节点剧本)
- 轨迹平滑:B样条曲线,符合运动力学
- 冲突检测:采用 OBB + SAT 工业级检测算法
为什么选择 SyncBus?
与传统 PLC 方案对比
| 维度 | 传统 PLC 方案 | SyncBus |
|---|---|---|
| 多机协同 | 需大量底层编程,开发周期长 | 剧本驱动,开箱即用,快速部署 |
| 修改灵活性 | 需重新下载程序,停机影响大 | 修改 YAML 剧本,实时生效 |
| 可视化 | 无或需额外购买监控系统 | 内置foxglove监控支持 |
| 容错能力 | 故障后常需手动干预复位 | 自动检测、报警,部分故障可自恢复 |
| 扩展性 | 增加设备需重新配置,较为复杂 | 节点即插即用,易于扩展 |
与开源方案(如 ROS)对比
| 维度 | ROS(机器人操作系统) | SyncBus |
|---|---|---|
| 学习成本 | 高,需熟悉其通信框架与生态 | 低,专注于协同逻辑,业务人员易上手 |
| 工业集成 | 需自行适配各类工业协议与设备 | 内置 MQTT、WS,开箱即连、注重中央控制的优化 |
| 实时可靠性 | 侧重于研究,实时性与鲁棒性需加固 | 为工业与演出场景设计,支持断网续演 |
| 编排方式 | 需编写代码或复杂配置文件 | 语义化 YAML 剧本,直观易懂 |
| 系统完整性 | 需自行整合调度、监控等模块 | 提供“导演端-执行端-监控端”完整套件 |
典型场景,真实解决
🎭 场景一:文旅演艺 - 打造惊艳的移动舞台
挑战:多台载人AGV或道具车需完成复杂、同步的轨迹表演,不容有失。
SyncBus 方案:
- 编导直接编写视觉化剧本,描述队形与动作。
- 刚性跟随模式确保多车如阅兵方阵般整齐划一。
- 实时监控中随时可暂停/继续,演出安全可控。
🏭 场景二:智能工厂 - 提升物流效率与安全性
挑战:多台 AGV 在仓库或车间中并行作业,需避免拥堵碰撞,并适应网络波动。
SyncBus 方案:
- 全局冲突检测在任务下发前识别潜在死锁。
- 动态避让让车辆在运行时智能等待或绕行。
- 离线自持确保网络短暂中断时搬运任务不间断。
🖼️ 场景三:智慧展馆 - 创造沉浸式互动体验
挑战:多台讲解或互动机器人需根据观众动线或触发信号做出协同响应。
SyncBus 方案:
- 角色映射让同一剧本指挥不同机器人执行差异化动作。
- 轻松对接传感器信号,实现观众触发的动态流程。
- 远程统一运维,减少现场值守人力。
快速开始,三步上手
体验 SyncBus 的协同魔力非常简单:
-
启动导演端(负责整体调度与监控)
cd SyncBus.Director ./tools/run.sh -
启动执行端 (Agent)(每台设备一个)
cd SyncBus.Agent ./tools/run.sh agv_01 localhost # 启动设备 agv_01 ./tools/run.sh agv_02 localhost # 启动设备 agv_02 -
打开浏览器,开始编排
访问http://localhost:8000,进入监控大屏,上传或编写你的第一个 YAML 剧本。
你的第一个剧本(让一台车走个方形):
name: "初次编舞"
cast:
my_vehicle: [agv_01]
steps:
- type: ABSOLUTE
target: my_vehicle
params: { x: 2, y: 2 }
duration: 3
- type: FORMATION
target: my_vehicle
params: { shape: rectangle, width: 4, height: 4, center_x: 2, center_y: 2 }
duration: 12
告别复杂编程,拥抱智能协同
SyncBus 不只是又一个控制软件,它是为简化多机协同而设计的全新思路。无论你是舞台编导、产线工程师还是展馆策划,都可以通过它,轻松驾驭多台设备,实现精准、稳定、富有创意的协同作业。
让协同,从此简单、可靠、看得见。
愿意一起学习的小伙伴,可以加qq: 285861181 ,共同交流。
本文来自博客园,作者:egreen,转载请注明原文链接:https://www.cnblogs.com/egreen/p/19568685

 浙公网安备 33010602011771号
浙公网安备 33010602011771号