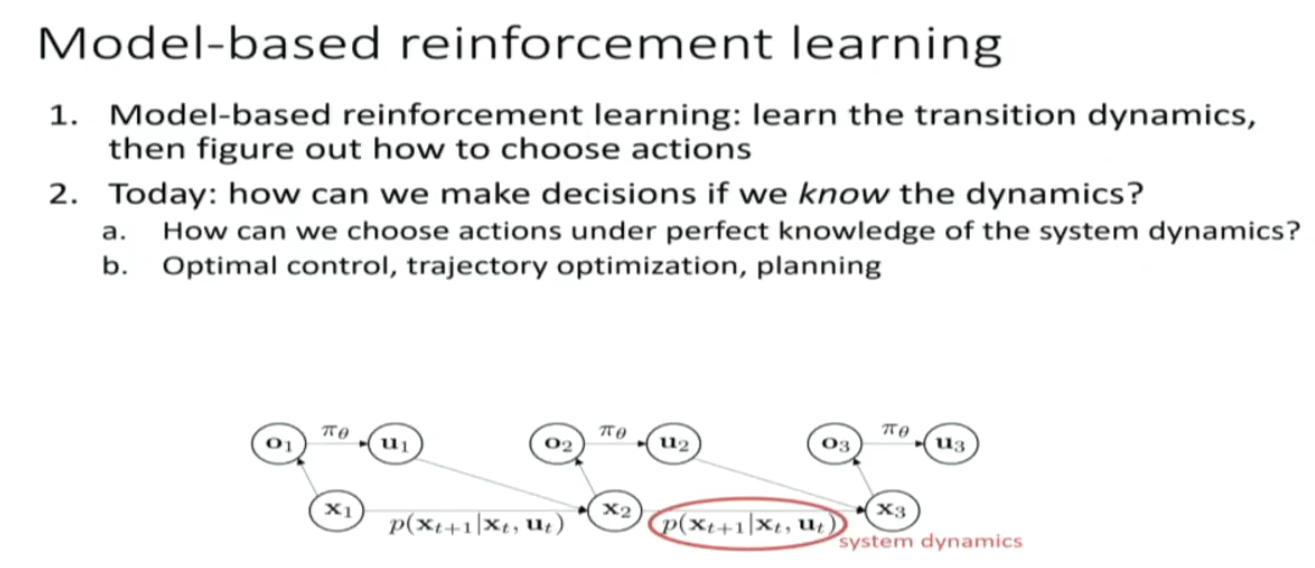
CS294-112 深度强化学习 秋季学期(伯克利)NO.7 Optimal control and planning
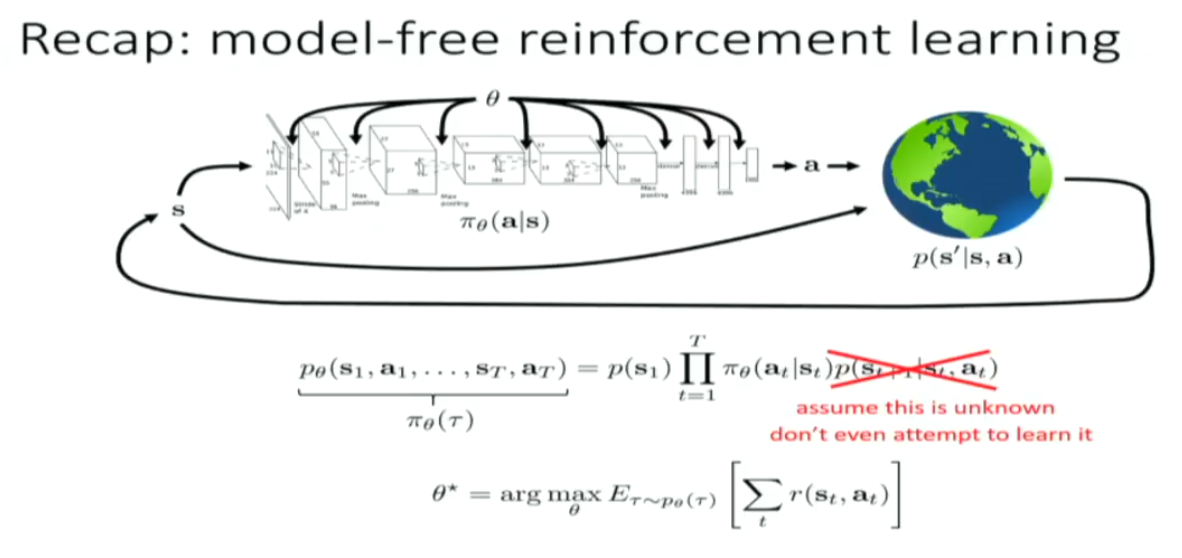
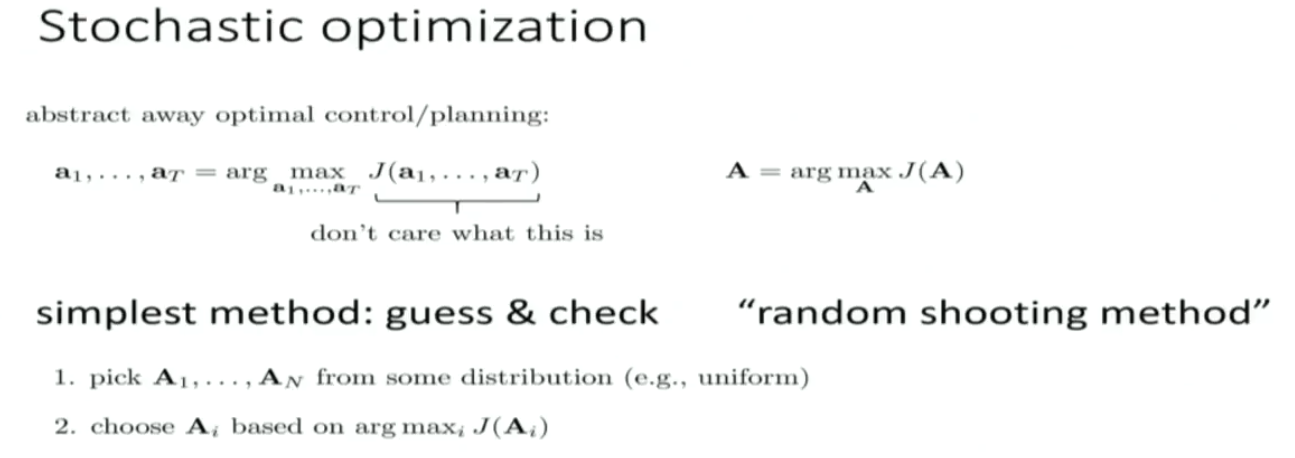
transition possibility is unknown and we even don't need to estimate the possibility



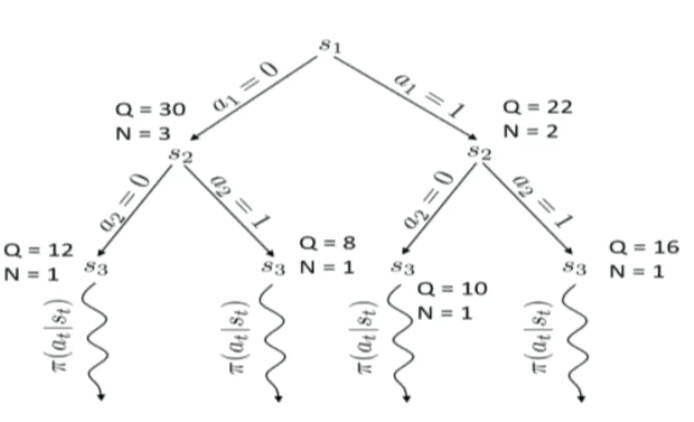













transition possibility is unknown and we even don't need to estimate the possibility

 浙公网安备 33010602011771号
浙公网安备 33010602011771号