会员
周边
新闻
博问
闪存
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
ecoflex
首页
新随笔
联系
管理
[ROS] Chinese MOOC || Chapter-8.5 urdf
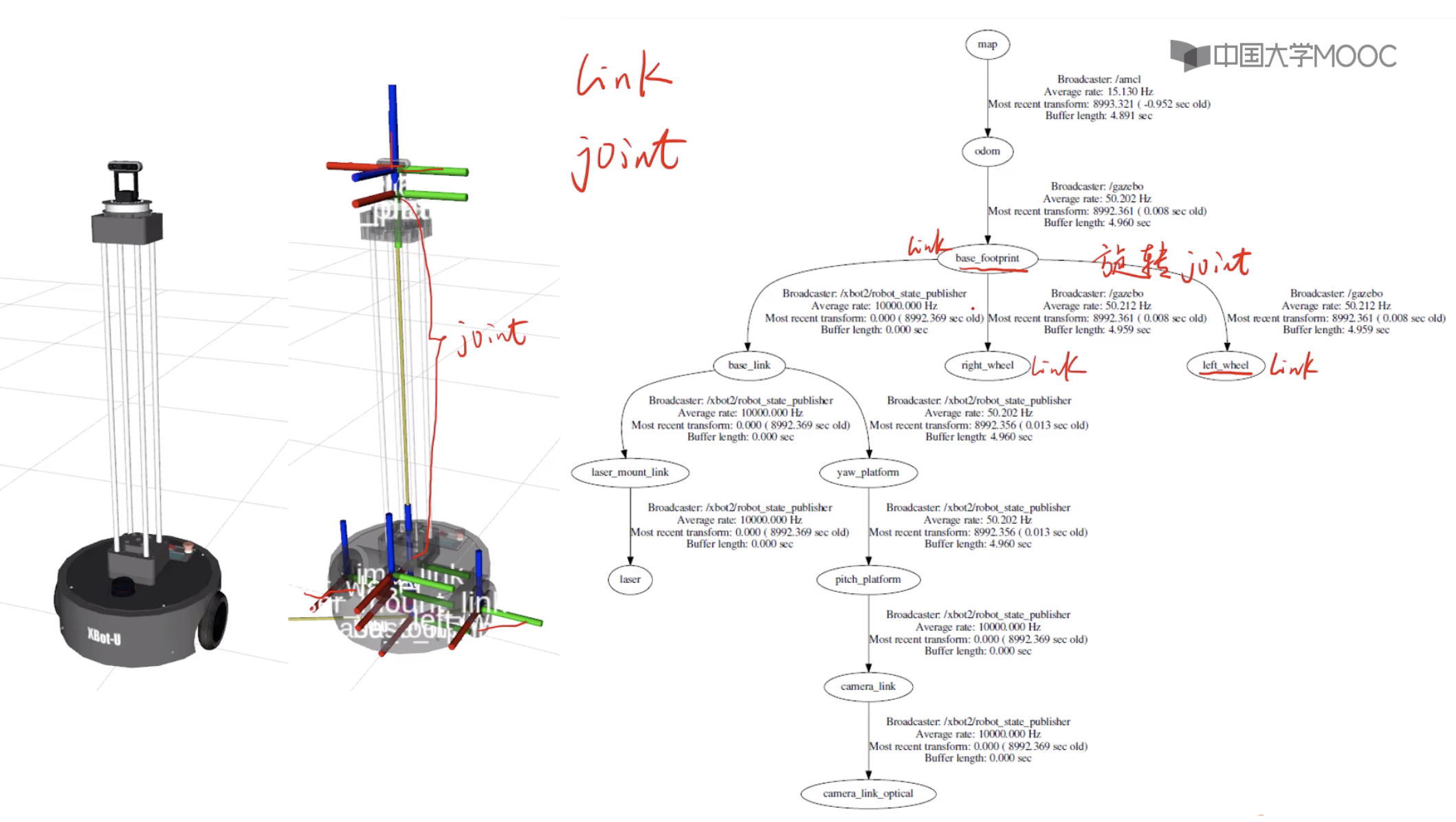
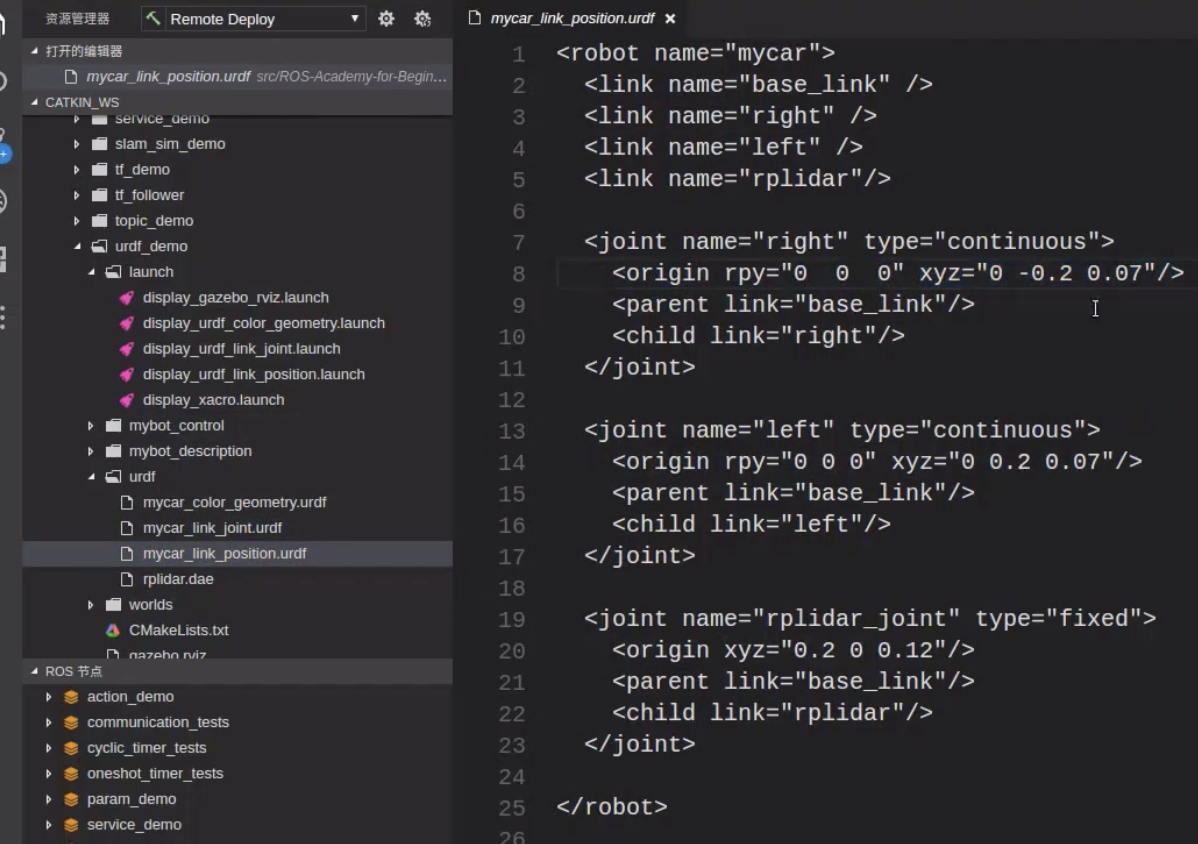
oint
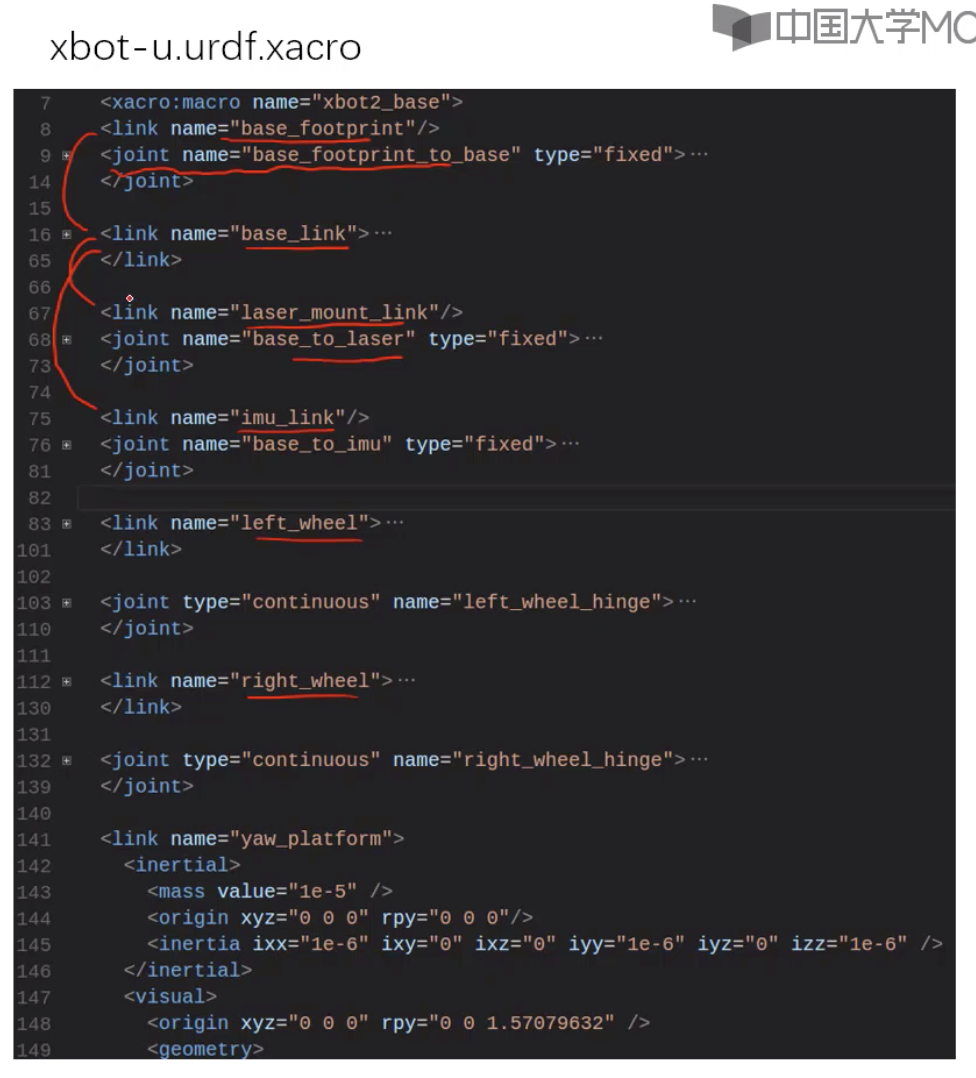
所有的link joint都在一起了,我们在上面没写坐标变换的信息,信息在下面这个文件里
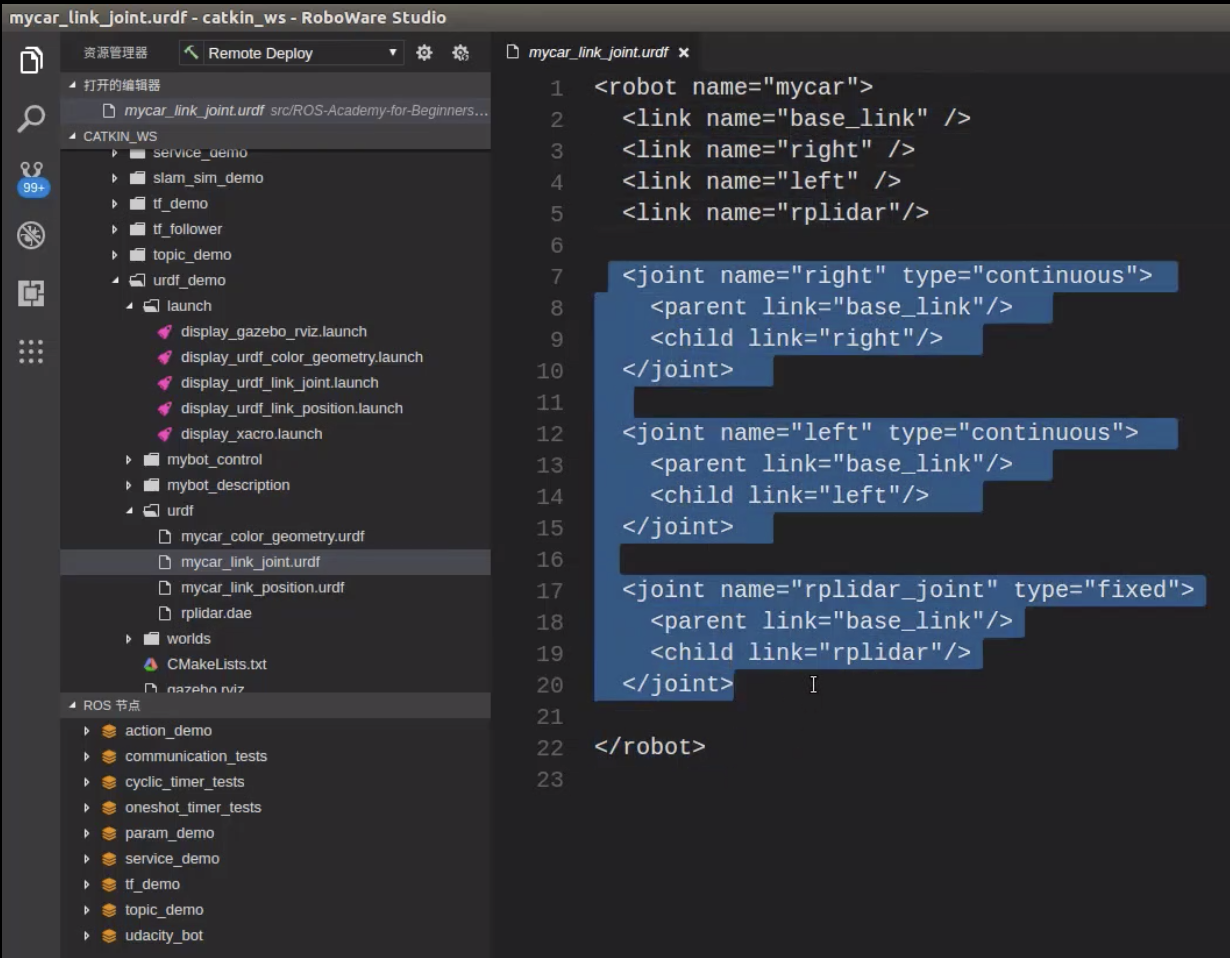
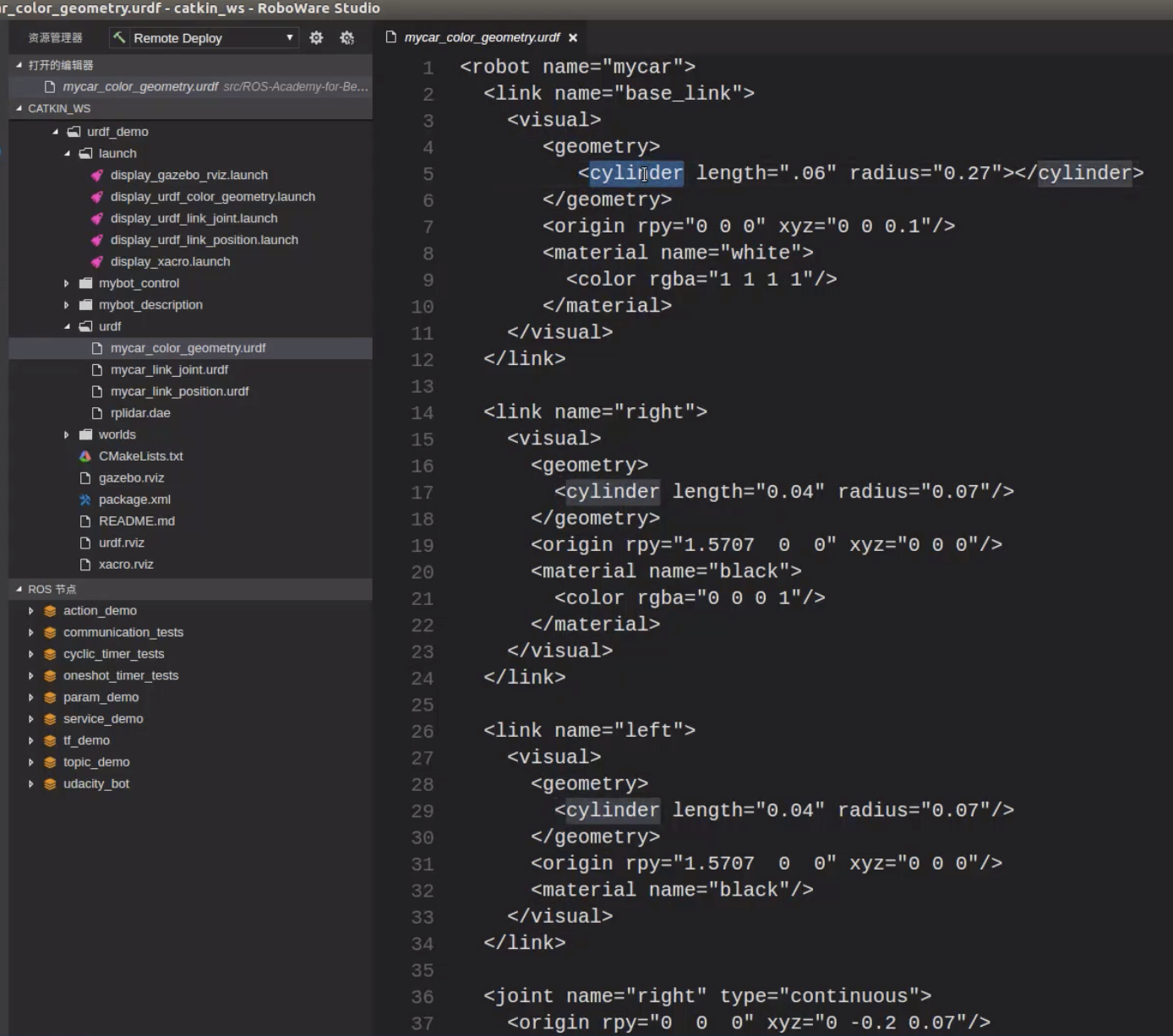
小车模型的 最终版本
小车完成了
posted @
2019-05-04 09:19
ecoflex
阅读(
127
) 评论(
0
)
收藏
举报
刷新页面
返回顶部
公告

 oint
oint
 oint
oint
 浙公网安备 33010602011771号
浙公网安备 33010602011771号