<反向传播(backprop)>梯度下降法gradient descent的发展历史与各版本
梯度下降法作为一种反向传播算法最早在上世纪由geoffrey hinton等人提出并被广泛接受。最早GD由很多研究团队各自独立提出来,可大都无人问津,而hinton做的研究完整表述了GD方法,同时hinton为自己的研究多次走动人际关系使得其论文出现在了当时的《nature》上,因此GD得到了第一次面向大规模受众的介绍。这为后面各种改进版GD的出现与21世纪深度学习的大爆发奠定了最重要的基础。
PART1:original版的梯度下降法
(下面关于梯度下降法的论述,我将使用直白浅显的语言)
首先已经有了 对weights和bias初始化过的神经网络计算图,也有一套训练集。
然后补充一下 具体training set 是如何投进去的:
如果我们训练集总共就几千个或者说不到几千个样本,那直接把它喂给神经网络就行(让m等于training set总样本数)。
但往往training set样本数是几万上百万的,这时一口气全部喂进去就太累了,我们往往采取分batch的方法投放数据集,即把数据集分成一撮撮(类比分治算法,类比一大堆草要剁,我把草分成一捆捆放到铡刀上):
记每堆数据有m个样本,training set总样本数为M
当m=1时,也就是一次GD训练走一个样本,有点奢侈哈哈哈,称为随机(stochastic)梯度下降法。
此时cost function J(w,b,.......)=LOSS(y^,y)+正则化项
当m=M时,也就是一次GD训练走全部样本,称为batch梯度下降法。
此时cost function J(w,b,.......)=1/M * (全部Loss(y^(i),y(i))求和)+正则化项
当m介于两者之间时,称为minibatch梯度下降法。
这三种方法是最基础的梯度下降法,随机GD缺点是会失去向量化带来的加速,导致整体下来速度慢(当然它是单次训练最快的哈哈哈),而且会跳上来跳下去的,不太喜欢它,在训练接近尾声时,它的结果并非完全收敛,而是波动的,这一点可通过动态增大减小learningrate来调节,另外随机GD可以用作在线学习,这算一个特色吧。batchGD缺点是训练总样本大时单次迭代时间太长导致整个训练过程耗时久,机子卡死,坑爹啊。所以一般我们都用minibatch法来跑GD,这样可以手动(也有自动调每个batch的m大小的,我就不在这写了)控制我们的GD。
可阅读1986年的经典之作:Learning internal representations by error-propagation, by David Rumelhart,GeoffreyHinton
PART2:进阶版GD--momentum动量梯度下降法
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
在正式讲它之前,我们先介绍一种表示平均值的数学概念------滑动平均,也叫指数加权移动平均(Exponentially Weighted Moving Average)
现在有一组数据,需要找一个数来代表这组数据的平均水平,那么大多数人肯定想都不用想,所有数加起来然后除以数的个数,也可以叫做求期望。但是这种方法在计算机中并不友好。首先它需要一定的存储空间来保存这组数据,另外还要进行一次运算来算得平均数,如果数据量很大那么计算也会略有延时。为了克服这些问题,我们采用了一种新方法来表示一组数据的平均水平,即指数加权移动平均。
这里引入了一个新变量v与人设参数β。核心公式为 vt=β * vt-1 + (1-β) * θ t ,θ t 是当前第t个原始数据,以vt代表前t个数据的平均水平,vt-1 表示前t-1个数据的平均水平,β为更新参数,由人为指定。当β趋于1时v的走势趋于直线,跟原始数据的相关性弱;当β趋于0时v的走势趋于原始数据走势,跟原始数据的相关性强。如果有看过吴恩达cousera深度学习课程的同学肯定见过他举的气温变化例子的折线图,这里就不列出来了。 一般v0设置为0。
这一概念不仅在反向传播中有应用,RL领域中MC方法和TD方法更新Q(s,a)和V(s)的公式也是以EMA为基础提出的。可以说EMA在CS中应用广泛。
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
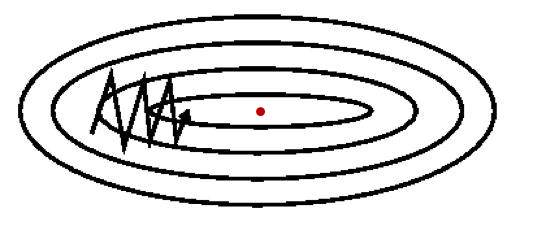
使用PART1中的梯度下降法,必然会遇到一个问题:迭代的时候老是震荡,不能尽快收敛到最优点(如下图)。然而通过更改学习率a不能很好的解决这个问题。为了找到更牛逼的反向传播方法,开始有人把EMA用到GD迭代上,从而诞生了GD的改进版本---动量梯度下降法。
下面是momentumGD的参数更新方法:
vt = β * vt-1 + (1-β) * dwt
vt = β * vt-1 + (1-β) * dbt
w = w - a * vt
b = b - a * vt
这样通过引入动量v来预示最优点和当前位置的相对方向,便有效地遏制了之前更新过程中的震动,降低了整体优化耗时。(见下图)
温馨提示:momentum与SGD搭配使用更酸爽哦

PART3:momentum的改进版---NAG(Nesterov accelerated gradient)
这名字听起来逼格很高有没有。其实也没啥厉害的,就是在momentum基础上改动了一下,但是它确实加速了收敛。
下面是NAG的迭代公式:

进一步推导,得到:

(其中d相当于momentum的v,θ则是要更新的参数,a是学习率)
从等价形式看,NAG在momentum基础上多了一个 β [ g(θi-1) - g(θ i-2 ) ] 。意义已经很明显了:如果这次梯度比上次梯度变大了,那么有理由相信它会继续大下去,如果这次梯度比上次梯度变小了,那么有理由相信它会继续小下去。是不是想起来了牛顿法??没错,用的都是二阶导的思想。通过这一改动无疑成功加速了收敛。
下面这张图来自hinton的课程ppt,可以帮助理解,其中蓝线是momentum,绿线是NAG。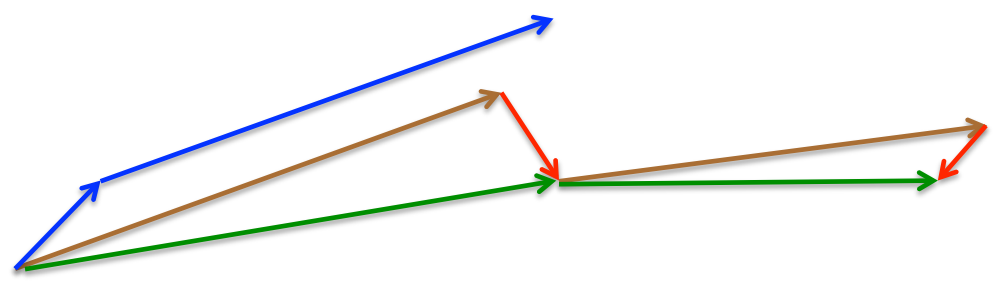
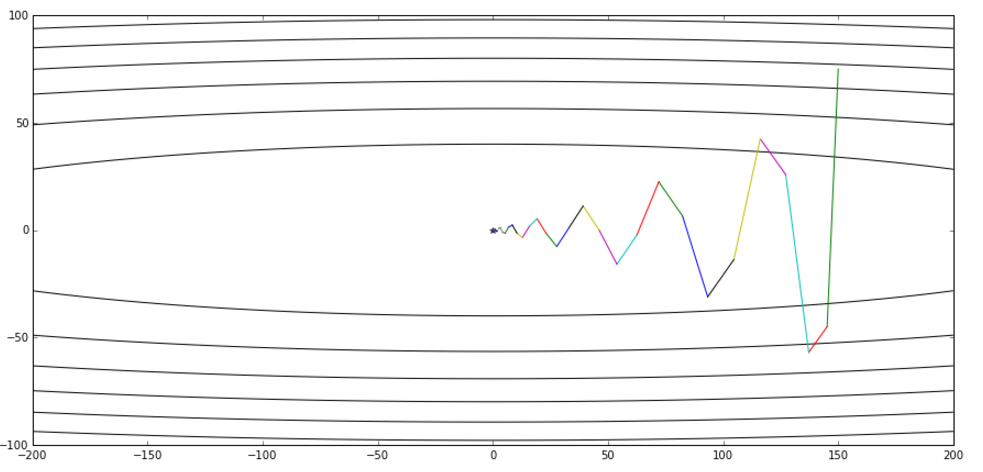
从全局收敛的视角对比momentum和NAG:(上面为momentum,下面为NAG)
PART4:Adagrad与Adadelta
前面两个算法是在梯度更新上做了改动,下面要说的Adagrad与Adadelta则是在学习率上做了改动。Adagrad能自适应地为各个参数分配不同学习率,解决了不同参数应该使用不同更新速率的问题。
下面是Adagrad的更新公式:

其中θ i,t 表示第i个参数第t次迭代时的值,η是人设学习率,Gi,t 是第i个参数到第t次迭代时的梯度累加量,Gi,t =Gi,t-1 + h * hT (其中h为当前参数的梯度向量)。ε是人为设定的辅助值,用来防止G为0时程序报错。
通过用![]() 来代替之前静态的学习率a,我们达到了随迭代次数增加学习率减小的效果。Adagrad 在数据分布稀疏的场景能更好利用稀疏梯度的信息,相比 SGD能更有效地收敛。而它的缺点也十分明显,随着时间的增加,它的分母项越来越大,最终导致学习率收缩到太小无法进行有效更新。
来代替之前静态的学习率a,我们达到了随迭代次数增加学习率减小的效果。Adagrad 在数据分布稀疏的场景能更好利用稀疏梯度的信息,相比 SGD能更有效地收敛。而它的缺点也十分明显,随着时间的增加,它的分母项越来越大,最终导致学习率收缩到太小无法进行有效更新。
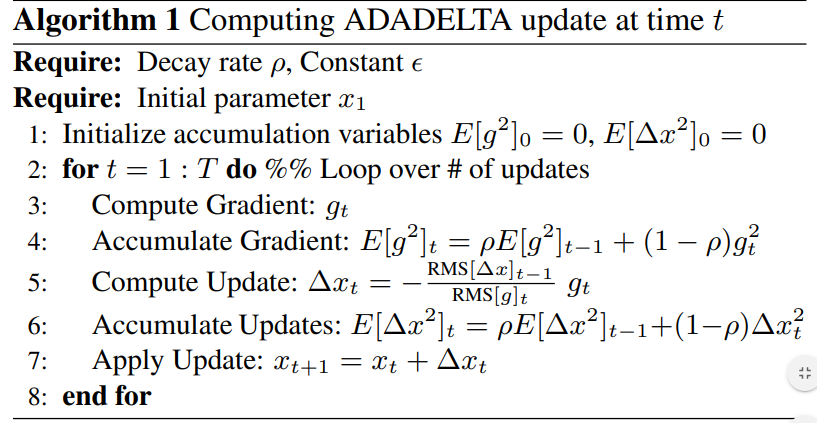
在Adagra基础上,google的研究人员做了一些改进从而得到了Adadelta。
其对参数的更新方法如下:
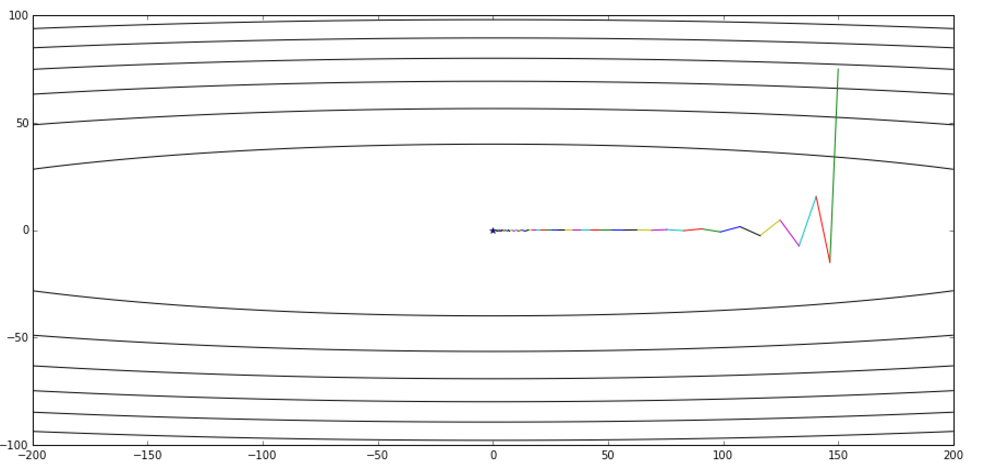
下图是四种方法在mnist数据集上的对比图:
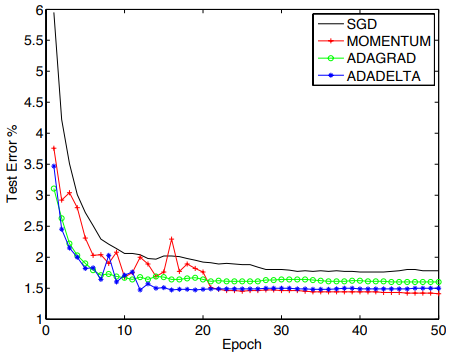
如果想进一步了解adadelta,可在此处查看原作:ADADELTA: An Adaptive Learning Rate Method
PART5:均方根传播(RMSprop)
RMSprop是hinton在他的课程中讲述的一种方法,跟上面说的Adadelta基本相似,
每次迭代中,针对待优化参数θ:
1、计算其梯度dθ ;
2、计算Sdθ =β * Sdθ + (1-β) * dθ2 ;
3、进行优化
通过使用梯度平方的指数衰减学习率,RMSprop也对不同参数采用了不同更新速率。Hinton本人建议设置β为0.9,设置起始学习率a为0.001。
PART6:Adam
把RMSprop和momentum结合到一起,便得到了强大的‘、目前最常用的Adam优化方法。该方法由OpenAI 的 Diederik Kingma 和多伦多大学的 Jimmy Ba 在2015年提交到ICLR的论文Adam:a method for stochastic optimation 提出,相较于以上其他算法,该方法还有着很好的稀疏梯度和噪声问题处理能力。
算法实现步骤:
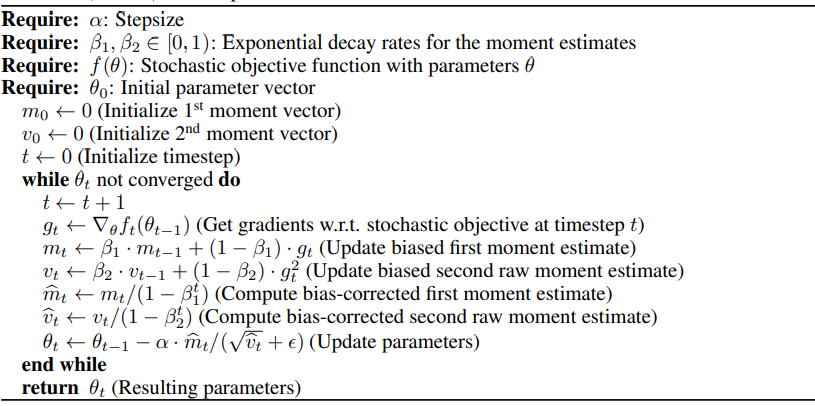
Adam 的默认超参数配置:
Adam的一大优点就是不怎么需要调参,此处只是对超参作一个简单说明和推荐设置。
- a:学习率或步长,它控制了权重的更新比率(如 0.001)。较大的值(如 0.3)在学习率更新前会有更快的初始学习,而较小的值(如 1.0E-5)会令训练收敛到更好的性能。
- β1:一阶矩估计的指数衰减率(如 0.9)。
- β2:二阶矩估计的指数衰减率(如 0.999)。该超参数在稀疏梯度(如在 NLP 或计算机视觉任务中)中应该设置为接近 1 的数。
- ε:最不重要但也不可或缺的超参数,其为了防止在实现中除以零(如 10E-8)。
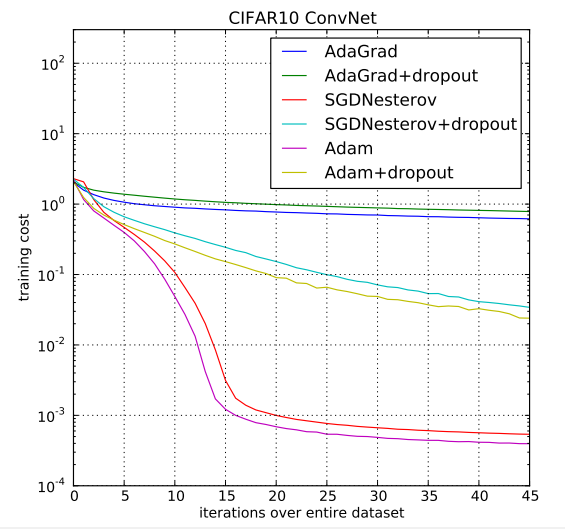
在CIFAR10数据集上,Adam和其他算法的表现:
PART7:AdaMAX
这是Adam的拓展版本。
在Adam中,单个参数的更新规则是将其梯度与当前和过去梯度的L2范数成反比例缩放。把这里的L2范数泛化到Lp范数也不是不可,尽管这里的变体会因为p值的变大而在数值上变得不稳定,但在特例中令p趋于无穷便得到了一个稳定又简单的算法。此时时间 t 时的步长和 vt^(1/p) 成反比例变化。
算法实现步骤:
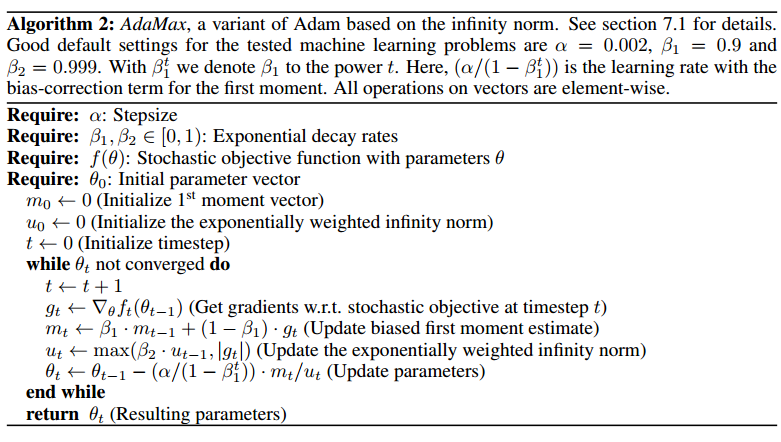
AdaMax 参数更新的量级要比 Adam 更简单,|∆t| ≤ α。
=========================================================================
=========================================================================
最后放一个十分直观的汇总比较,该图像由Sebastian Ruder制作:
两幅图片来自Sebastian Ruder—An overview of gradient descent optimization algorithms

 浙公网安备 33010602011771号
浙公网安备 33010602011771号