freertos内核--任务调度剖析
前言
在使用freertos的时候,我们都知道在创建了一系列任务之后,启用调度器,系统就可以帮我们管理任务,分配资源。本文主要对调度器的原理进行剖析,从vTaskStartScheduler()函数开始,一探究竟。
freertos版本:9.0.0
启动调度器
vTaskStartScheduler()
vTaskStartScheduler()用于开启调度器,具体代码如下:
void vTaskStartScheduler( void ){
BaseType_t xReturn;
xReturn = xTaskCreate( prvIdleTask,
"IDLE",configMINIMAL_STACK_SIZE,
( void * ) NULL,
( tskIDLE_PRIORITY | portPRIVILEGE_BIT ),
&xIdleTaskHandle );
if( xReturn == pdPASS )
{
portDISABLE_INTERRUPTS();
if( xPortStartScheduler() != pdFALSE )
{
/* Should not reach here as if the scheduler is running the
function will not return. */
}
}
}
代码已做删减(只显示了核心部分,下同)。可以看到在开启调度器的时候,vTaskStartScheduler()主要做了三件事:创建空闲任务;关闭中断,确保后续工作不会被Systick打断;同时调用xPortStartScheduler()(此处以ARM_CM3内核为例)
xPortStartScheduler()
xPortStartScheduler()函数代码如下:
BaseType_t xPortStartScheduler( void )
{
extern void vPortStartFirstTask( void );
/* Make PendSV and SysTick the lowest priority interrupts. */
portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;
/* Start the timer that generates the tick ISR. Interrupts are disabled
here already. */
vPortSetupTimerInterrupt();
/* Initialise the critical nesting count ready for the first task. */
uxCriticalNesting = 0;
/* Start the first task. */
prvPortStartFirstTask();
/* Should never get here as the tasks will now be executing! Call the task
exit error function to prevent compiler warnings about a static function
not being called in the case that the application writer overrides this
functionality by defining configTASK_RETURN_ADDRESS. */
prvTaskExitError();
/* Should not get here! */
return 0;
}
}
第一步是对系统Systick中断和PendSV中断进行优先级设置,均设置为最低( 为什么要设置Systick中断和PendSV中断最低优先级),第二步使能Systick中断(但是中断不会发生,因为之前关闭了中断),最后调用vPortStartFirstTask()。
执行第一个任务
vPortStartFirstTask()
vPortStartFirstTask()用于执行第一个任务。
static void prvPortStartFirstTask( void )
{
__asm volatile(
" ldr r0, =0xE000ED08 \n" /* Use the NVIC offset register to locate the stack. */
" ldr r0, [r0] \n"
" ldr r0, [r0] \n"
" msr msp, r0 \n" /* Set the msp back to the start of the stack. */
" cpsie i \n" /* Globally enable interrupts. */
" cpsie f \n"
" dsb \n"
" isb \n"
" svc 0 \n" /* System call to start first task. */
" nop \n"
);
}
代码分析:
ldr r0, =0xE000ED08
ldr r0, [r0]
ldr r0, [r0]
msr msp, r0
这4步的目的是给主堆栈的栈顶指针msp赋初值,具体操作步骤如图:
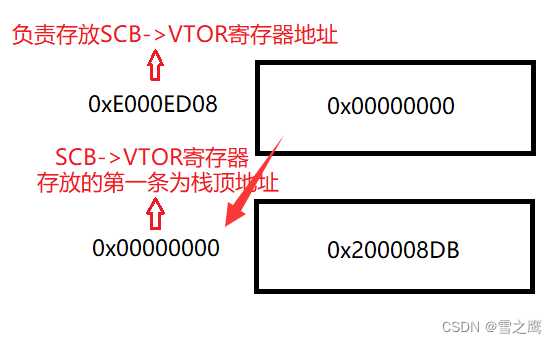
主堆栈指针就指向了栈顶0x200008DB。
cpsie i
cpsie f
之后开启中断和异常,让下面的SVC中断能够响应
svc 0
产生系统调用服务号为0的SVC中断
SVC中断服务函数
vPortSVCHandler()函数代码如下:
void vPortSVCHandler( void )
{
__asm volatile (
" ldr r3, pxCurrentTCBConst2 \n" /* Restore the context. */
" ldr r1, [r3] \n" /* Use pxCurrentTCBConst to get the pxCurrentTCB address. */
" ldr r0, [r1] \n" /* The first item in pxCurrentTCB is the task top of stack. */
" ldmia r0!, {r4-r11} \n" /* Pop the registers that are not automatically saved on exception entry and the critical nesting count. */
" msr psp, r0 \n" /* Restore the task stack pointer. */
" isb \n"
" mov r0, #0 \n"
" msr basepri, r0 \n"
" orr r14, #0xd \n"
" bx r14 \n"
" \n"
" .align 4 \n"
"pxCurrentTCBConst2: .word pxCurrentTCB \n"
);
}
代码分析:
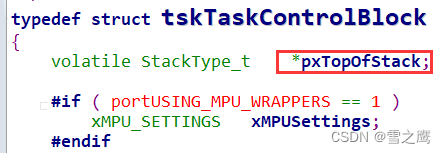
ldr r3, pxCurrentTCBConst2
ldr r1, [r3]
ldr r0, [r1]
此部分代码是将pxCurrentTCBConst2这个任务控制块指向的第一个成员的值赋值给r0。从下图任务控制块的结构体可以看到,第一个成员是栈顶指针。
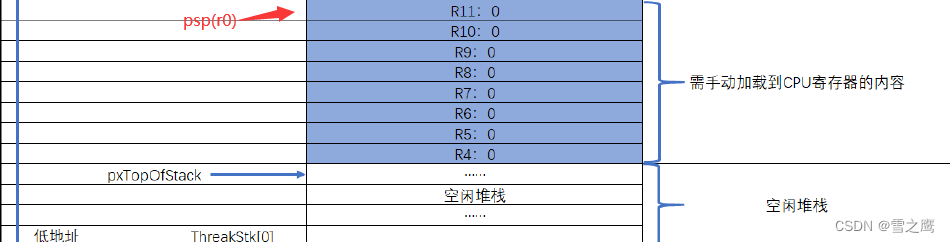
ldmia r0!, {
r4-r11}
msr psp, r0
以r0 为基地址,将栈中向上增长的8个字的内容加载到CPU寄存
器r4~r11,同时r0 也会跟着自增。并将自增后的r0赋值给psp,如下图所示:
mov r0, #0
msr basepri, r0
basepri寄存器置0,打开所有中断
orr r14, #0xd
bx r14
当从SVC中断服务退出前,通过向r14寄存器最后4位按位或上0x0D,使得硬件在退出时使用进程堆栈指针PSP完成出栈操作并返回后进入线程模式、


 浙公网安备 33010602011771号
浙公网安备 33010602011771号