《A Comprehensive Review of Driver Behavior Analysis Utilizing Smartphones》阅读笔记
〇、摘要
1)人类因素是交通事故的主要催化剂;最异常的类型:疲劳、分心、醉酒、鲁莽驾驶。
2)关于用手机进行困意和异常行为检测的方法,尚未有完整的回顾。
3)本文囊括了不同的方法,包括:传感方法、检测算法、以及其相应的精度和局限性;分析了智能手机的行为分类系统和情景感知、移动众包感知以及主动转向控制等概念集成所面临的挑战以及可能的解决方法;还包括了在智能手机和云环境上进行的模型训练和更新。
一、引言
1)驾驶员行为可以定义为驾驶员对驾驶环境(车速或者车距)的反应,来进行一个确定的行为(加速或者转向),不同的司机在加速或者制动的方式、转方向盘的方式、保持与前车的距离等方面不尽相同
2)还有些行为容易受外部因素影响:
外部因素:交通状况、气候或季节、道路类型和环境、可见性
人的因素:年龄、性别、性格、人口统计学背景、有意识地做决定、驾驶经验、对车辆的熟悉度、当前身体状况(毒品、酒精、疲劳、分心、压力、心情)
3)在所有因素中,疲劳、分心、醉酒、鲁莽是造成交通事故的最常见的异常行为。
4)研究表明,如果乘客可以及时给司机进行提醒,那就不太可能会造成碰撞事故;因此需要ADAS(Advanced Driver Assistance System高级驾驶辅助系统)或者IDAS(Intelligent Driver Assistance Systems智能驾驶辅助系统)来及时准确地提醒司机避免危险情况。
5)辅助系统必须分类出危险驾驶员或者异常的驾驶模式来确保可以进行提醒;当驾驶员犯困、分心、鲁莽或者醉酒的时候,通常在驾驶行为或者身体动作方面有某些变化;
犯困:快速持续眨眼、点头、摆动脑袋、经常打哈欠
分心:由于一些随机发生的不可预测的原因,对外界刺激反应时间变长,并且会无意识地减速或者突然的横/纵向行为
醉酒:延迟反应、突然的加速/减速
鲁莽:和醉酒相似,由于情绪或外部刺激会突然的加速/减速,并且会违反限速的规定
6)6种异常驾驶模式:
① Weaving:蜿蜒或者S形的驾驶
② Swerving:沿着直线行驶时突然改变方向
③ Sideslipping侧滑:偏离正常行驶方向
④ Fast U-turn:速度高的时候进行U行转弯
⑤ Turning with a wide radius:和Fast U-turn相似,沿着大半径的圆形弧线行驶,可能会漂移出车道
⑥ Sudden braking:类似紧急制动,但是没有明显的原因
7)驾驶员监控:直接和间接方式
直接方式:用不同的传感器监测心率、身体动作,正确率更高(尤其是脑电图EEG),但是有侵入性,对驾驶员不友好;由于人各有异,检测过程会更加复杂
间接方式:监测面部表情、踏板或者转向活动、对某些事件的反应。
① 远程信息处理盒:市面上已有,但是造价高且顾客接受度低,限制了快速广泛地部署。
② 智能手机:廉价且容易用来进行驾驶员行为分析,配置了多种传感器:加速度计、陀螺仪、磁力计、麦克风、摄像机、温度计、GPS等。因此手机具有的监测潜力:车辆加速、驾驶员分心、其他外部目标,同时手机联网便于传感数据的传送。
8)已有的关于用手机进行驾驶员行为分析的论文:
① Kaplan,用可见/不可见的方式监测困意和分心,用手机解决方案的细节有限。
② Ferreira,研究不同安卓手机传感器和分类算法,只用了ANN、SVM、RF、BN,而没有用最新的方法。
③ Handel,基于智能手机的保险远程信息处理,只进行了不同手机之间的比较,以便严格的刹车检测。
④ Meiring and Myburgh,回顾了驾驶行为分析的概貌,但是应用的算法类型缺乏对智能手机解决方案的重视。
⑤ Vlahogianni and Barmpounakis,用智能手机进行分析的总体概述,但是漏掉了文献中提到的方法。
⑥ Engelbrecht,基于车辆手机传感的智能交通系统应用的综述,但是仅对有限的论文进行概述,并且局限于用智能手机进行驾驶员行为分析。
⑦ Martinez,表征驾驶风格的机器学习算法的类型,不考虑应用算法的平台以及和ADAS的融合。
⑧ Wahlstrom,回顾较为全面,但是更关注手机作为测量工具以及和用户的交互服务,而不是驾驶员行为分类。
9)本文的重点:
① 驾驶行为分析方面,非侵入性的智能手机解决方案的全面总结;选择论文的条件是在应用中只使用手机。
② 深入讨论智能手机解决方案面临的挑战,不同方法面临的不同限制,同时讨论了与其他技术进行融合的可能性。
二、智能手机的应用
A.使用智能手机和其他硬件对驾驶员行为进行分析
① Lee and Chung,多传感融合进行驾驶员睡意监测,结合了眼睑闭合率(来自于手机三个维度的加速计和前置摄像头)、心电描记法(ECG)、光学体积描记术(PPG)以及车内温度进行睡意监测。
色调-饱和值(HSV)颜色模型方法:进行人脸检测,提取的眼部特征用来计算眼睑闭合率。
ECG信号:计算心率和整体活动水平,是检测睡意的一个良好的指标。
PPG信号:计算血压,长时间工作或者缺乏睡眠会导致血压升高。
温度和三轴加速记:预测驾驶员的警惕性指数。温暖的环境更容易犯困,用加速计来跟踪检测车辆速度。
传感器数据通过蓝牙传输到手机,手机将收集到的数据输入到模糊贝叶斯网络,每个模糊变量定义了输出状态的隶属度,也就是疲劳水平。输出值越接近1,驾驶员的疲劳程度越高。
0.6~0.75:部分睡眠状态,建议休息一会
> 0.75:触发提醒机制
评价:
系统较为全面;
PPG传感器有轻微侵入性,驾驶员不会在整个行程过程中将手指放到传感器上来测量PPG信号;
ECG没有EEG(脑电信号)侵入性高,同时准确率也更低,不清楚是否会提高系统价格;
系统需要进一步改进。
② Araujo,一个应用,建议并教授驾驶员按照有效的驾驶模式去驾驶车辆,目标是为了通过训练驾驶员来降低燃油消耗,同时检测危险行为比如高速行驶和猛踩油门。另外,数据主要来源是CAN总线,希望得到低成本的应用Torque Pro,通过OBD-II的蓝牙适配器采集CAN总线数据。从收集数据开始,如车辆的速度、加速度、高度、油门信号、即时发动机油耗和200秒内的发动机圈数。然后从收集到的数据中提取车辆停车的平均、最小、最大和持续时间等特征。通过车辆速度可以很轻易地区分出驾驶场景(城市道路、高速路或综合)。通过结果数据和车辆制造商提供的消耗度量来制定标准的消耗度量,然后转为模糊值来衡量燃油消耗,值低说明良好的燃油消耗。还采用中心平均去模糊化,传递一个清晰的值给驾驶员。最后综合考量驾驶场景和燃油消耗,采用模糊逻辑将最高的值传递给驾驶员。
评价:
无法评估,由于缺乏假阳性和假阴性的准确性度量;
由于驾驶环境是线性判别式确定的,会被认为在高速上行驶,所以系统无法检测速度;
窗口时间200s后进行提示,虽然窗口时间可以更改,但不清楚高数据传输会对数据测量或分类精度产生多大影响;
标准消耗指标 = 实际燃油消耗 / 汽车制造商提供的消耗指标,但是车辆年限,空气过滤器情况会影响燃油消耗,进一步会影响分类结果;
每个汽车制造商都有专有协议,因此找寻通用廉价的OBD-II蓝牙适配器就很麻烦。
③ Hong,用朴素贝叶斯对攻击性驾驶行为进行分类,除了手机传感器,增加了低成本OBD-II蓝牙阅读器和IMU惯性测量单元(装在方向盘后面)。加了这两个硬件之后,可以获取更多的特征,分类成功率也更高了。
为了避免特征对特定行程环境的依赖,定义了6种驾驶环境:1)开始:开始后5s;2)停止:停止前5s;3)高速:车辆速度高于50km/h;4)转向;5)转向前:转向前5s;6)转向后:转向后5s;
数据收集:
3周,22位参与者,1017次旅途,542h
用过去3年的违章记录和调查问卷来确定一位司机是否激进;用违章记录作为基准,模型用留一交叉验证法的正确率90.5%;用调查问卷作为基准的正确率81%。但是违章记录没有区分事故和罚单,对于判断驾驶员是否激进不具有代表性。
B.人员流动分析
1)与驾驶员行为分析的差别是:人员流动分析对车辆和旅程的子群体更感兴趣,这些子群体可以用一些常见的运动行为来表征。
2)由于GPS的广泛应用,我们可以在高准确性和时间频率的情况下跟踪个体的运动;这些数据源便于理解和表征人类日常活动的行为模式;这些分析进一步可以改进许多移动性任务的决策和根本原因分析,比如交通或者公共运输系统的监控和规划,以及检测异常事件和预测/模拟交通相关的现象。
3)比如可以通过分析集体轨迹模式来检测异常事件;轨迹模式是反映个体出行行为的一种模式。比如可以检测到音乐会/体育竞赛之类的异常活动。
C.智能手机在其他领域的应用
1)手机配置了多种传感器,移动传感的应用已经应用于人类活动识别、结构监测、交通分析以及医疗保健领域。
2)Lu将时空分析应用于交通基础设施数据,提出了运输服务分析的协作框架,来检测运输异常事件,从而触发移动感测。Kelly提出可以通过智能手机的运动传感器来评估健康状况;另外可以通过加速计来判断走路方式,从而区分帕金森病患者和健康的人,可以用来检测帕金森病的严重程度;
三、困意检测
A.视觉检测方法
1)特征及其检测方法:
① 眼睛状态:监控特定时间内眨眼的次数
② 眨眼睛:监控眨眼率和闭眼的时长
③ 嘴巴和打哈欠:监控打哈欠的频率
④ 头部运动:监控头部位置
2)主要方法:通过手机前置摄像头获取驾驶员的面部图像,分析面部特征,比如眼睑闭合率PERCLOS,来判断司机是否处于犯困的危险状态。
3)Xu,使用智能手机前置摄像头和一个安卓API,捕捉眼睛位置,限制在40*20像素。用一个具有16个隐藏神经元的单隐层ANN来为眼睛状态进行分类,在误差函数中引入二次加权惩罚因子,使得欠拟合和过拟合都最小化。
PERCLOS:眼睑闭合率,所捕获的帧数量中闭眼的百分比
眨眼时间:通过连续闭眼的第一帧和最后一帧的时间来计算
眨眼率:500帧眨眼的次数 ➗ 500
数据范围设置:
严重犯困:500帧内PERCLOS超过25%;或者眨眼时间超过2500ms
轻微犯困:眨眼时间超过1000ms;或者眨眼率超过0.5;或者驾驶时间超过4h
实验结果:
95% 正确率
0 假阳性
10% 假阴性
系统限制/整体评价:
① 一组个性化的训练数据(眼睛状态图像)
② 智能手机计算能力有限
③ 眼镜或肤色对结果影响不大;光线影响较大,夜里实用性降低;
④ 要求手机固定位置,才能捕捉到面部信息。
4)Dasgupta,用PERCLOS,但是基于单图的检测不可靠,提出了三阶段检测框架:①计算PERCLOS --> ②驾驶员声音,语音/清音(VUR)作为困倦信号的指示器 --> ③反应时间测试,需要驾驶员在一定时间限制内触摸手机屏幕
- 对于捕捉到的图像:①提高局部对比度、加强细节、如果驾驶员脑袋的角度倾斜超过30度进行矫正;②用Haar特征进行人脸检测;③用白天和晚上的眼部图像来训练Haar分类器;④训练线性SVM来区分睁开/闭着的眼睛。
- 为了计算VUR:①用智能手机的麦克风捕捉20kHz的说话信号,用奇异值分解(SVD)来消除杂音;②用SVM,以MFCC为输入,返回语音和其他声音的时长;③用得到的输出计算VUR。
- 反应时间测试:要求驾驶员10s内触摸手机屏幕
整个系统的测试流程:
如果司机10s内PERCLOS超过20%,那么VUR启动;如果声音测试失败,那么通过扬声器发出警告。同时给登记的紧急号码发送短信提醒。
实验结果:
系统平均检测率93%,仅使用PERCLOS时,在4个不同测试集上的平均检测率是88%
整体评价:
Dasgupta声称SVD可以去除噪音,但是论文中并没有详细说明;分离重叠声音具有挑战性,而且仅仅使用SVD就足够是值得怀疑的!如果开了收音机,会发生假阴性的情况;
让分心的司机在10s内触摸手机屏幕;
SVM的训练在智能手机环境下不可行;
手机需要固定来采集面部图像。
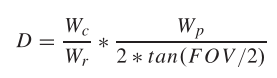
5)Chang,检测方法:PERCLOS + 距离前车的距离;
PERCLOS:用Haar特征采集面部和眼睛图像,增加肤色作为输入来对眼睛状态进行分类(白色是肤色,黑色是眼睛)
如果黑色/白色 < 0.8,说明眼睛可能闭起来了
如果闭眼时间 > 400ms,说明驾驶员在犯困。
距离前车的距离:
用Haar特征来检测前车;
车距计算方式用下面公式:
数据范围设置:
如果车距 < 7m,发出警告。
用AdaBoost算法训练分类器:
面部分类器,用7240个图像;眼部分类器,用3500个图像;车辆分类器,用5900个图像。
认为音频与困意检测无关,被排除掉。
实验结果:
没有公布
系统限制/整体评价:
每个分类器的训练需要大量的图像;
没有告知公式中的W_c如何获得,很难预测前车的实际宽度;
智能手机有限的处理能力可能会影响相对位置精度、车辆检测和被跟踪对象数量方面的性能;
手机必须固定来采集面部图像和前车图像。
6)Qiao,眨眼、摇头和打哈欠等面部特征
处理流程:
① 用高斯滤波器进行噪音消除;
② 用平均滤波器进行加强;
③ 用Haar特征来进行人脸检测;
④ 基于面部位置和大小来估计眼睛和嘴巴的位置;
⑤ 睁开的眼睛是黑色像素,有更大的可见瞳孔,因此可以定位到眼睛的位置;
⑥ 将眼睛图像转为灰度图像,计算黑色像素所占比例;
⑦ 根据面部质心计算脑袋的移动;
⑧ 用Canny边缘发现算法计算嘴巴的轮廓,来判断是否在打哈欠;
⑨ 设置阈值来确定驾驶员眼睛是否闭着、是否在打哈欠、是否在摇头晃脑,检测到任何一个行为都可以认为驾驶员处于疲劳状态;
实验结果:
系统在眨眼、摇头和打哈欠的500幅图像上进行了测试,准确率为90.5%
系统限制/整体评价:
系统旨在降低假阴性,但是假阳性(误报率)偏高;并不是驾驶员出现某一个动作就能判定为疲劳驾驶,只有持续一段时间一直出现某个动作才能确定;
智能手机需要固定才能采集面部图像
7)Li,没有训练数据的精确眼睛检测,提出渐进式定位方法(PLM),系统旨在消除对统计方法的需求,并侧重于面部区域内的表观和几何关系,为了减少面部不相关区域对眼部检测的不确定性和计算的高成本。
由三个部分组成:
① 通过智能手机采集到的图像,用肤色模型来检测人脸;
② PLM算法的使用,它有三个小的子部分:用驾驶员的嘴巴作为面部特征来检测右眼所在大致区域;灰度投影用来确定右眼区域;通过随后的分析来确定眼睛位置;
③ 分析抽取到的眼睛图像。首先确定睁眼尺寸并作为阈值,如果接下来检测到的眼睛尺寸小于阈值,可以合理怀疑是否闭眼。如果5帧中3帧闭眼,系统将发送困意警告来提醒驾驶员。
整体评价:
虽然肤色变化不会影响系统准确性,但是在漆黑环境下不能很好的工作;
眼镜或者长刘海儿的存在会影响检测精度;因为光线在玻璃表面会反射,刘海儿会影响右眼区域的灰度分布;
系统过度依赖面部的灰度分布;
智能手机需要固定来检测面部。
8)Zhang,用智能手机捕捉面部特征,除了眨眼和打哈欠,还引入血液容积脉搏波BVP来进行睡意检测(来源于成像光电容积描记术(PPG)技术,监控图像序列的变化,而不考虑具体内容),可以提取分析视频中记录的生理过程,使用了二阶盲识别(SOBI)扩展PPG。
实验流程:
根据摄像头规格不同,手机前置摄像头距离驾驶员15~80cm;
捕获的图像流由九通道SOBI进行分析,以估计来自不同生理活动的潜在信号;
信号采集顺序随机,需要识别算法来正确识别对应于生理反应的信号;
分析结果用来评估心率变异性HRV、眨眼持续时间、眨眼频率、打哈欠频率;根据事先设定的阈值来判断驾驶员是否在犯困;
实验结果:
91.5%的检测率
整体评价:
虽然提出了新的用单个手机摄像头的多信息融合的方法,仍旧有很多限制;
在低照明/照明干扰环境、驾驶员头部倾斜/摇晃、在崎岖不平的道路上时,系统不能很好的进行工作;
如果没有检查驾驶员的生理特征,就不能很好的工作,因为生理特征因人而异,需要进行调整以达到最优性能;
需要固定手机位置;如果驾驶员眼睛小/带了太阳镜,就不适用了。
B.声音检测方法
Xie,D^3-Guard使用手机麦克风检测困意。随着人体运动会产生多普勒频移,提出可以检测点头、打哈欠、困意下操作方向盘;
多普勒频移是指:相对于信号源移动的观察者周围音频信号的频率或波长的变化。
系统设置:
说话者首先发送20kHz的声音信号,麦克风接收反射信号;然后,在通过快速傅立叶变换将信号变换到时频域之前,应用带通滤波和欠采样来提高频率分辨率,而不失真频谱。
从每个瞌睡驾驶动作的音频信号的多普勒轮廓中提取有效特征,并用作长短期记忆(LSTM)网络的输入;训练了两个LSTM模型:第一个分类正常状态、点头、打哈欠;第二个分类正常、异常的操作方向盘。
两个LSTM的输出被传递给神经网络,以预测驾驶员是否昏昏欲睡。
实验结果:
94%的精度
主要限制/整体评价:
需要大量数据来训练分类器;
道路情况会影响精度;在弯曲道路上需要更频繁操作方向盘时,精度会变低;
没有说明乘客的存在是否会影响精度,因为乘客的行动也会影响多普勒频移;
不知道LSTM、NN是否能在智能手机环境下训练。
C.总结
具体的特征在相应的论文中有列表;
瞌睡检测的主要思想是通过直接分析驾驶员的特征,例如他的眼睑、头部或身体以连续的方式运动。因此,手机必须安装在安全的位置,以捕捉司机的脸,无论光照条件如何。
四、异常驾驶模式检测
A.阈值方法
Fazeen,极端驾驶行为将在加速计收集的数据中产生更高的值;设定阈值可以很快检测出异常驾驶行为,同样可以检测异常道路状况(减速带、坑洞等)。
实验设置:
智能手机首先在加速度计的y轴上与车辆坐标系对齐,并与车辆的移动方向对齐;
x轴加速度计的数据可用于检测转弯或变道,y轴可用于检测加速或制动;z轴可用于检测振动或道路异常。
实验结果:
没有公布异常驾驶的精度;
总体道路异常分类系统精度85.6%;
整体评价/系统限制:
这个简单的想法可以很容易地部署到任何智能手机上,并且不需要很高的计算成本。
只能针对特定的道路、车辆、和手机条件来设定阈值,当条件更改时,阈值也会随之发生变化。
恶劣的道路环境影响读取传感器数据,不能区分大量的驾驶模式;
低速、短距离的时候可以工作良好;长时间长距离的时候会有加速计的累积误差;
要求手机固定,而且如果发生倾斜需要能够自动调整。
B.模式匹配方法
用DTW比对收集到的传感器信号和激进行为的信号。
1)Johnson and Trivedi,系统MIROAD,利用加速度计、陀螺仪和磁力计的传感器融合输出上的DTW对驾驶员执行的动作进行分类。
陀螺仪可以清晰地给出转向信息;
陀螺仪加上加速度计和磁力计之后,可以获取准确的设备方向。数组[陀螺仪x轴,加速计y轴,地磁仪x轴]可以准确地指示驾驶员行为。
为了检测事件开始和结束时间,使用绕陀螺仪x轴旋转能量的简单移动平均SMA;如果超出预设阈值,则事件开始,接下来的样本被连接,直到低于阈值则事件结束。
使用DTW比较不同行为的模板(用相同方式收集);
根据计算得到的距离,用KNN算法(k=3)来将事件分为3类;
实验结果:
精度:91.9%
2)Eren,用加速度计、陀螺仪和磁力计
实验流程:
① 收集安全驾驶行为模板:转向、加速、减速、变道;(来自于5位安全驾驶员,手动选择标记)
② 为了识别选定信号的事件,对窗口样本进行z-score归一化后与每个模板进行匹配,用DTW方法计算相似性;
③ 使用贝叶斯推理计算的概率来对驾驶员行为进行分类;
实验结果:
93%
3)Singh,检测刹车和车辆横向运动,通过群体感知可以检测道路拥挤(当同一地理区域中有多部智能手机检测到刹车事件时),可以检测刹车和急刹车
实验步骤:
① 从加速度计收集到的数据首先使用欧拉角定位到原始轴;
② 只有y轴的数据和刹车有关
③ SMA过滤器使数据更平滑,由于车辆震动产生的
④ 带通滤波器移除数据噪音,由于硬件灵敏度产生的
⑤ 偏航角(Yaw)的计算方法:重力传感器和陀螺仪的z轴融合,计算角速度
⑥ 角速度通过SMA过滤器,更加平滑
⑦ 将处理后的数据分别与模板进行比较,相似性最低的就是所收集数据的事件。
实验结果:
94.6%
4)Ali,做了DTW和KNN的评估,用手机中的加速计、陀螺仪和GPS。
传感器的作用(手机坐标系和车辆坐标系需要一致):
加速计的y和z查明道路上的颠簸,x轴来确定是否激进驾驶;
陀螺仪的z轴检测激进行为;
GPS提供车辆速度;
实验过程:
① 用低通滤波器处理数据,去噪音;
② 两个月记录了540个驾驶事件(9个事件类别)
③ 对比了两种算法对两种任务的分类能力:
task1:正常驾驶、激进驾驶分类,考虑到道路异常;更广义;结果:KNN 98.67% vs. DTW 90.22%
task2:正常、激进的转弯和变道转弯的分类,不考虑道路异常;结果:KNN 78.06% vs. DTW 96.75%
整体评估/实验限制:
DTW的主要限制:需要收集模板数据,并与模板进行比较计算;计算量大;不安全行为模板不好收集;
普遍的限制:手机需要固定;
只考虑到转向事件,超速、急刹车没有考虑到;
U形转弯正确率不高;
只计算了10位驾驶员的先验概率,不能代表驾驶员全体;
分类器的准确性基于测试参与者完成的调查,也就是说结果受主观因素影响;
高速行驶情况下检测的正确率不清楚;
每种行为只保留一个模板,如果模板代表性不够,那么不知道什么时候什么方式可以进行更新;
群体感知有可以集体共享数据,但是实现这样应用的时间成本受限;
没有提供KNN算法中k的值,也没有讨论k值对结果的影响;
没有包含急刹车和急加速事件。
5)Chaovalit,模板匹配方法,使用SAX进行数据分析。加速度计用于考虑沿横向和纵向轴的运动,对应于转弯、变道、制动和加速;磁强计的原始数据被用作检测横向域驾驶事件的指标;利用GPS数据提供车辆的位置和速度数据。
整体评价:
不清楚如何收集不同攻击性驾驶行为的代表性样本;
只提及到激进驾驶(突然加速、突然刹车等)样本,并进行了人工验证;
比Eren的系统计算成本低。
实验过程:
SAX将数据转为串,在转为串之前将一个时间窗口内的样本取平均,进行分段聚合;SAX主要的目的是计算消耗;
驾驶过程中的流式数据转为串,并与转换后的代表性数据进行比较,用min-dist计算的距离代表相似性。
如果相似性超过阈值,可以判定为某一个驾驶行为;
系统限制:
时间信息被平均出来,影响精度;
不适合部署于实际检测,因为精度只有25%;
需要固定手机位置来检测。
C.模糊逻辑方法
1)Castignani,模糊逻辑机制,SenseFleet,检测危险驾驶行为:猛加速,猛刹车,剧烈转向,超速。包括校准阶段,使其适应并且克服检测不同异常驾驶行为的硬阈值。该系统利用加速度计、重力传感器、磁传感器和GPS来计算加速度、方向速率、速度变化和方位变化,用于异常驾驶检测。地磁计和陀螺仪计算方向变化;考虑到不同道路的速度限制来检测超速事件;系统考虑到天气和时间因素来考量事件风险性和为驾驶员评分。然后输入到有一系列模糊规则的模糊逻辑系统,输出事件(加速过猛、刹车过猛、转向过猛或超速)。
实验结果:
检测率:90%
1500个校准样例
系统限制:
需要校准样例;如果校准样例不具有代表性,会变的很复杂;
需要手机固定
2)Eftekhari and Ghatee,混合离散小波变换DWT和自适应模糊推理系统ANFIS识别驾驶行为;四个特征:角速度、横向加速度、纵向加速度和角度变化;
系统实现:
在计算4个特征之前用DWT对时间序列数据进行两层分解,作为ANFIS的输入;
训练6个ANFIS来计算安全、半攻击、攻击性之间的相似性和相异性;
提出3种决策机制(多数投票、相似性和相异性的比值、分级排序),其中分级排序正确率最高;
20位驾驶员,完成问卷来判断是安全、半攻击还是攻击;
数据采集频率2Hz,采集时长8分钟,共960个样例;70%用来训练,30%用来测试;
实验结果:
正确率92%;
根据问卷分类不是很准;
系统限制:
验证样本数目少;
计算量大,手机环境不适合计算;
手机位置需要固定。
3)Eftekhari and Ghatee,提出一个新系统:模糊逻辑 + 神经网络,利用手机的陀螺仪、加速度计、磁力计,检测激进驾驶。
系统实现:
比较每位驾驶员的行为和安全/激进行为之间的相似性;
分析传感器数据段的4个阶段组成,每个阶段都有6个样本和50%重叠的3s数据组成;①数据段能量F:陀螺仪在6s内沿z轴收集的平方值之和来计算,设定阈值,超过阈值的会被判定为某一行为(变道、转弯、U形转弯);②行为类型的判定用F的峰值、角度变化和持续时间作为具有10个神经单元的单个隐藏层的神经网络反向传播的输入来确定的,500个训练输入得到的精度89%;③检测到的行为被赋予模糊值,模糊值由加速度计在横向上平方值的方差来计算;④用模糊值来评估驾驶行为;隶属函数首先通过考虑从三个积极的和三个安全的驾驶员那里收集的750个机动动作来确定。
相似性被制成表格;
给出安全和激进行为评分;
两个评分加上驾驶员怒气值来评估驾驶员行为:安全分<激进分and怒气值<51:激进驾驶员!
20位驾驶员,手机和车都不一样;
系统限制:
小数量的驾驶员不能代表全体;
会假阳性或漏检测的概率高;
驾驶行为只有变道、转弯、U形转弯;
如果安全分=激进分,不好进行分类;
调查问卷得到的怒气值不能代表行驶过程中的怒气值;采集问卷的时候是平静的,开车过程中遇到没有见的情况,怒气值暴增,会严重影响系统精度;
手机需要固定。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号