L5 Convex Optimization & Gradient-based Optimization Algorithm
Convex Optimization & Gradient-based Optimization Algorithm
凸优化
考虑优化问题:
- 如果 \(\mathcal{L}(\theta)\) 是一个凸函数,则该优化问题称为凸优化。
- 否则,称为非凸优化。
定义:凸函数
一个函数 \(\mathcal{L}: \mathbb{R}^d \rightarrow \mathbb{R}\) 是凸的,如果对于所有 \(\theta, w \in \mathbb{R}^d\) 和任何 \(\alpha \in [0, 1]\),
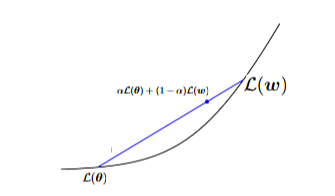
该图像展示了一个图形,说明了凸函数的定义。图形显示了一个表示函数 \(\mathcal{L}\) 的曲线,以及连接曲线上两个点的线段。线段位于曲线之上或与曲线重合,直观地表示了定义中的不等式。
- 几何直觉: 均匀向上的曲率。
- 简单例子: \(\mathcal{L}(\theta) = \theta\),\(\mathcal{L}(\theta) = \theta^2\),\(\mathcal{L}(|\theta|)\),\(\mathcal{L}(|\theta|)^2\)。
一阶凸性特征
假设 \(\mathcal{L} : \mathbb{R}^d \to \mathbb{R}\) 是可微的。\(\mathcal{L}\) 是凸的当且仅当对于所有 \(\theta, w \in \mathbb{R}^d\),
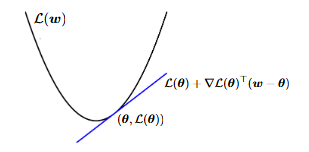
图像显示了一个凸函数 \(L(w)\) 及其在点 \((\theta, L(\theta))\) 的切线。切线由方程 \(L(\theta) + \nabla L(\theta)^T (w - \theta)\) 表示。
-
该定理常用于分析。
-
含义:\(\nabla L(\theta^*) = 0\) 当且仅当 \(\theta^*\) 是全局最小值。
-
这就是我们如何找到最小二乘法(线性回归)的最优参数。
二阶凸性特征
定理:通过海森矩阵判断凸性
设 \(\mathcal{L} : \mathbb{R}^d \to \mathbb{R}\) 是二次连续可微的。当且仅当其海森矩阵是半正定的(PSD),即:
- 如果目标函数是二次连续可微的,可以通过这种方式测试凸性。
示例:机器学习中的凸实例
我们有以下函数是凸的:
-
最小二乘法:
\[L(\theta) = ||X\theta - y||_2^2 \]\[L(\theta) = (X\theta - y)^T (X\theta - y) = \theta^T X^T X \theta - 2y^T X \theta + y^T y \]\[ \frac{\partial}{\partial \theta} \left( \theta^T X^T X \theta \right) = 2X^T X \theta \]\[\nabla L(\theta) = 2X^T X \theta - 2X^T y \]凸性因为海森矩阵 \(\nabla^2 L(\theta) = 2X^T X\) 是正半定的。
-
逻辑回归:
\[L(\theta) = \frac{1}{n} \sum_{i=1}^n \log(1 + \exp(-y_i \cdot \theta^T x_i)). \] -
多类逻辑回归:
\[L(\theta) = -\frac{1}{n} \sum_{i=1}^n \sum_{k=1}^K 1_{\{y_i=k\}} \log \left( \frac{\exp(\theta_k^T x_i)}{\sum_{j=1}^K \exp(\theta_j^T x_i)} \right). \] -
支持向量机学习问题(稍后)。
凸优化的优势
- 没有局部最小值。零梯度意味着全局最优解,对应于 \(\hat{\theta}\)。
- 尽管我们通常没有闭式解,但我们有可靠且高效的算法来找到全局最小值,即提供零梯度的点。
- 有一套完善的凸优化算法工具。
算法:
- 基于梯度的方法。
- 次梯度方法。
- ...
基于梯度的优化算法
迭代算法
从初始点 \(\theta_0\) 开始,迭代算法 \(A\) 将生成一系列迭代
对于 \(k = 0, 1, 2, \dots\),
- \(k\) 代表迭代,是一个索引数字。
- \(\theta_k\) 代表第 \(k\) 次迭代的结果。
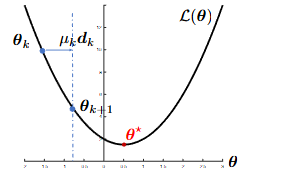
在实践中,\(A\) 通常具有什么形式?
- \(\Re \ni \mu_k > 0\) 是步长 / 学习率。
- \(d_k \in \mathbb{R}^d\) 是搜索方向,通常依赖于 \(\theta_k\)。
- 关键是在每次迭代中选择一个合适的方向 \(d_k\)。
需要确定的事项:
- 初始点\(\theta_0\)(适用于凸优化)。
- 搜索方向\(d_k\)。
- 学习率\(\mu_k\)。
- 停止标准。
搜索方向 \(d_k\)
目标:
要求:
\(d_k\) 应该指向一个能够降低函数值的方向。
命题:下降方向
假设 \(\mathcal{L}\) 是连续可微的,如果存在一个 \(d\) 使得
那么,存在一个 \(\tilde{\mu} > 0\) 使得
对于所有 \(\mu \in (0, \tilde{\mu})\)。因此,\(d\) 是在 \(\theta\) 处的下降方向。(该命题可以通过泰勒定理证明。)
梯度下降
-
这个命题告诉我们:在第 \(k\) 次迭代中,找到一个 \(d_k\) 使得
\[\nabla \mathcal{L}(\theta_k)^T d_k < 0 \]那么,\(d_k\) 必须是当前迭代点 \(\theta_k\) 的下降方向。
因此,一个可能的选择是
结果算法
梯度下降 (GD)
可以等价地写为
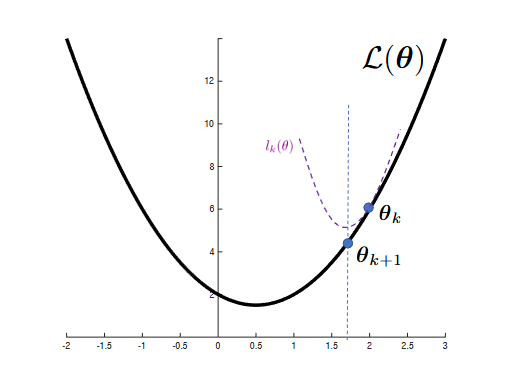
- \(\mathcal{L}(\theta_k) + \nabla \mathcal{L}(\theta_k)^\top (\theta - \theta_k)\) 是在 \(\theta_k\) 处对 \(\mathcal{L}\) 的线性近似。
- \(\frac{1}{2\mu_k} \|\theta - \theta_k\|_2^2\) 是与学习率 \(\mu_k\) 相关的近端项。
梯度下降:解释
- \(l_k(\theta)\) 是 \(\theta\) 的二次函数,即二次近似
- 在每次迭代中,我们有封闭形式的更新,即梯度下降算法
几乎通用的算法设计策略
通过解决一系列更简单的子问题来解决原始问题。
更简单的子问题可以从两个方面进行解释:
- \(\mathcal{L}(\theta)\) 的线性近似 + 一个近端项
- \(\mathcal{L}(\theta)\) 的二次近似 \(l_k(\theta)\)
一个有用的算法设计框架
假设任务是 \(\min_{\theta \in \mathbb{R}^d} \mathcal{L}(\theta)\),我们可以设计一个算法如下:
\(\mu_k\) 是类似学习率的量。
- 当 \(q_k(\theta)\) 是 \(\mathcal{L}\) 的线性近似时 \(\implies\) 梯度下降 gradient descent
- 当 \(q_k(\theta)\) 是 \(\mathcal{L}\) 的二阶近似时 \(\implies\) 牛顿法 Newton’s method
- 当 \(q_k(\theta)\) 是 \(\mathcal{L}\) 本身时 \(\implies\) 近端点法 proximal point method
- 当 \(q_k(\theta)\) 是 \(\mathcal{L}\) 的单分量线性近似时 \(\implies\) 随机梯度下降 (SGD) stochastic gradient descent (SGD)
...
许多优化算法遵循这个设计框架。
收敛问题
- 为了解决 \(\min_{\theta \in \mathbb{R}^d} \mathcal{L}(\theta)\),我们无法解析地获得解 \(\hat{\theta}\)。
- 设计一个迭代算法,从 \(\theta_0\) 开始,它将生成 \(\{\theta_0, \theta_1, \theta_2, \dots, \theta_k, \dots\}\)。
算法的收敛性分析关注:
- \(\theta_k\) 是否会收敛到解 \(\hat{\theta}\)?即\[\lim_{k \to \infty} \theta_k \stackrel{?}{=} \hat{\theta} \]
- 如果是,这种收敛的速度是多少?
GD的收敛性
- 假设\(L\)是凸的且可微的,并且具有Lipschitz连续梯度,参数为\(L\),\[\|\nabla L(w) - \nabla L(u)\|_2 \le L\|w - u\|_2, \quad \forall w, u ~~ 在LR中满足凸性和Lipschitz梯度。 \]
Lipschitz 连续梯度(Lipschitz Continuous Gradient):这表示梯度变化不会太快,函数的曲线是“平滑”的
定理:GD的收敛性及收敛速率
具有恒定学习率\(\mu_k = \mu = 1/L\)的梯度下降满足
- \(L(\theta_k)\)以\(O(1/k)\)的速率收敛到\(L(\hat{\theta})\)。
- 这并不意味着\(\{\theta_k\}\)以某种速率收敛到\(\hat{\theta}\)。
- \(L(\theta_k) - L(\hat{\theta})\)称为次优性间隙。
学习率
学习率的选择
梯度下降:
- 在实践中,学习率最简单的选择是使用恒定学习率,即对于某个相对较小的 \(\mu\),有 \(\mu_k = \mu\),其中 \(k = 0, 1, \dots\)。一些典型的猜测值:\(0.05, 0.01, 0.005, \dots\)
- 在机器学习中,较大的模型通常需要较小的恒定学习率。
- 在优化中,也可以使用某种线搜索方法以自适应的方式选择 \(\mu_k\)。
- 然而,在机器学习中,线搜索并不被使用,因为它浪费了太多的计算。
- 当我们研究随机梯度下降时,将介绍衰减学习率的调度。
梯度下降的停止标准
典型的停止标准:
- 固定总迭代次数为 \(K\)。
- 当 \(\| \nabla \mathcal{L}(\theta_k) \|_2\) 很小时停止,比如 \(\| \nabla \mathcal{L}(\theta_k) \|_2 \leq \epsilon\)。
- 因为在最小值 \(\hat{\theta}\) 处,\(\| \nabla \mathcal{L}(\hat{\theta}) \|_2 = 0\)。
- 当 \(\| \theta_{k+1} - \theta_k \|_2\) 很小时时停止,比如 \(\| \theta_{k+1} - \theta_k \|_2 \leq \epsilon\)。
- 在机器学习中,当验证误差开始增加时停止。
将GD应用于LR
给定一组训练数据点:\(\{(x_1, y_1), \dots, (x_n, y_n)\}\),二元逻辑回归的学习问题为:
- \(\mathcal{L}\) 是凸的,并且具有Lipschitz梯度。
- 我们可以应用梯度下降法(GD):
如果学习率选择得当,它具有收敛保证:\(\mathcal{L}(\theta_k) - \mathcal{L}(\hat{\theta}) \leq \mathcal{O}(1/k)\)。
- 主要元素包括:1. 计算梯度并形成搜索方向。2. 确定学习率(通常是一个小常数)。3. 当满足停止标准时停止。
- 需要知道如何通过链式法则计算梯度。
一些GD的优缺点
优点:
- GD实现简单。
- 对几乎所有可微凸问题效果良好。
缺点:
- GD的收敛速度相对较慢。
加速梯度下降
带动量的梯度下降(Gradient Descent with Momentum)
GD:
- GD在每次迭代中强制实现充分下降,留下探索更有效搜索方向的可能性。
- 加速梯度下降方法的一个相当流行的技术是动量技术:
(动量)
等效形式:
- 由于Boris T. Polyak提出。
- 每次迭代的时间成本几乎与GD相同。
- 在实践中广泛使用,特别是在Adam算法中。
动量加速:几何解释
梯度下降(GD): \(\theta_{k+1} = \theta_k - \mu_k \nabla \mathcal{L}(\theta_k)\)
带动量的梯度下降:\(\theta_{k+1} = \theta_k - \alpha_k \nabla \mathcal{L}(\theta_k) + \beta_k (\theta_k - \theta_{k-1})\)
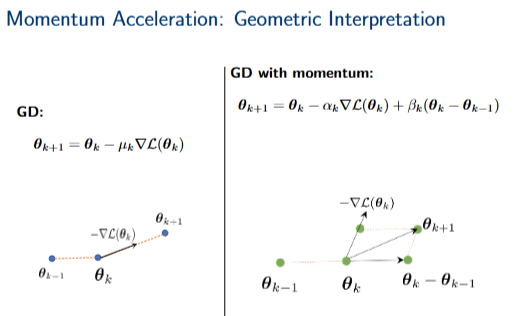
左侧图示了梯度下降(GD)的几何解释,其中一个点表示当前参数 \(\theta_k\),另一个点表示下一个参数 \(\theta_{k+1}\)。从 \(\theta_k\) 指向 \(\theta_{k+1}\) 的向量代表了更新步长,其方向与负梯度 \(-\nabla \mathcal{L}(\theta_k)\) 相同。
右侧图示了带动量的梯度下降(GD with momentum)的几何解释。除了当前参数 \(\theta_k\) 和下一个参数 \(\theta_{k+1}\),还引入了前一个参数 \(\theta_{k-1}\)。更新步长由两部分组成:一部分是与负梯度 \(-\nabla \mathcal{L}(\theta_k)\) 成比例的向量,另一部分是与前一步的更新向量 \((\theta_k - \theta_{k-1})\) 成比例的向量。这两个向量的叠加决定了最终的更新方向和大小。
涅斯特罗夫加速梯度下降法Nesterov’s Accelerated Gradient Descent
Nesterov加速
梯度下降(GD):
另一种非常有用的加速GD的技术是Nesterov加速梯度下降(AGD):
- Nesterov加速的动机来自动量,但在外推点上评估梯度,并且对\(\beta_k\)有特定选择。
- 每次迭代的时间成本几乎与GD相同。
- 在实践中广泛使用。
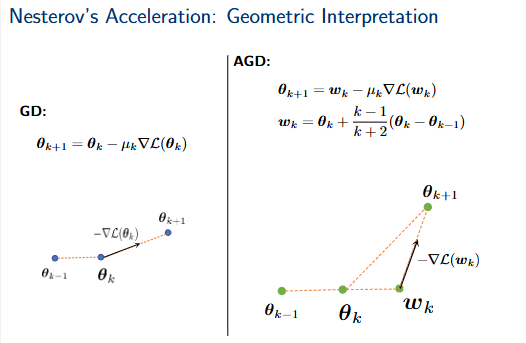
Nesterov加速:几何解释
梯度下降(GD):\(\theta_{k+1} = \theta_k - \mu_k \nabla \mathcal{L}(\theta_k)\)
加速梯度下降(AGD):\(\theta_{k+1} = w_k - \mu_k \nabla \mathcal{L}(w_k)\) \(w_k = \theta_k + \frac{k-1}{k+2}(\theta_k - \theta_{k-1})\)
左侧图展示了梯度下降(GD)的几何解释,其中一个点 \(\theta_{k-1}\) 移动到 \(\theta_k\),然后根据负梯度 \(-\nabla \mathcal{L}(\theta_k)\) 移动到 \(\theta_{k+1}\)。
右侧图展示了加速梯度下降(AGD)的几何解释。从 \(\theta_{k-1}\) 到 \(\theta_k\) 的移动,然后计算一个动量项 \(\frac{k-1}{k+2}(\theta_k - \theta_{k-1})\),将 \(\theta_k\) 移动到 \(w_k\)。最后,根据负梯度 \(-\nabla \mathcal{L}(w_k)\) 从 \(w_k\) 移动到 \(\theta_{k+1}\)。
AGD的收敛性
► 假设 \(L\) 是凸的且可微的,并且具有Lipschitz连续梯度,参数为\(L\)(例如,线性回归问题)。
定理:AGD的收敛性
具有恒定学习率 \(\mu_k = \mu = 1/L\) 的加速梯度下降满足
► \(\mathcal{L}(\theta_k)\)以 \(O(1/k^2)\) 的速度收敛到 \(\mathcal{L}(\hat{\theta})\)。
► 这个速度比GD快得多,后者仅具有 \(O(1/k)\) 的收敛速度。 AGD 收敛速度更快

 浙公网安备 33010602011771号
浙公网安备 33010602011771号