harris角点检测函数:cv2.cornerHarris()
img:数据类型为 float32 的入图像。
blockSize:角点检测中指定区域的大小。
ksize:Sobel求导中使用的窗口大小。常用 3。
k:取值参数为 [0,04,0.06]。常用 0.04。
import cv2
import numpy as np
img = cv2.imread('01_Picture/17_Chessboard.jpg')
print('img.shape:',img.shape)
#输出 img.shape: (512, 512, 3)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#gray = np.float32(gray)
dst = cv2.cornerHarris(gray,2,3,0.04) # 每个点与对应点的相似性地值,即变化值
print('dst.shape:',dst.shape)
#输出 dst.shape: (512, 512)
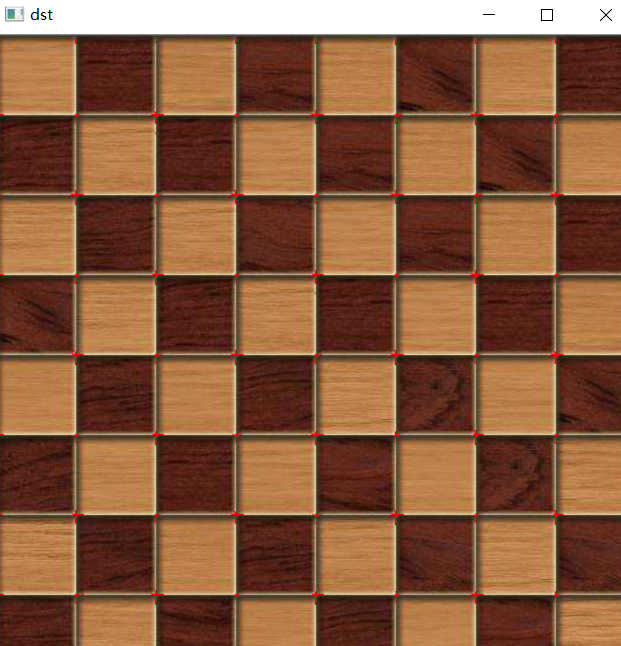
img[dst>0.01*dst.max()] = [0,0,255] # 比相似性最大值的百分之一要大,则标注为角点
cv2.imshow('dst',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
点击查看详情

 浙公网安备 33010602011771号
浙公网安备 33010602011771号