Canny边缘检测
- 流程
Canny边缘检测流程:
1) 使用高斯滤波器,以平滑图像,滤除噪声。
2) 计算图像中每个像素点的梯度强度和方向。
3) 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
4) 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5) 通过抑制孤立的弱边缘最终完成边缘检测。
-
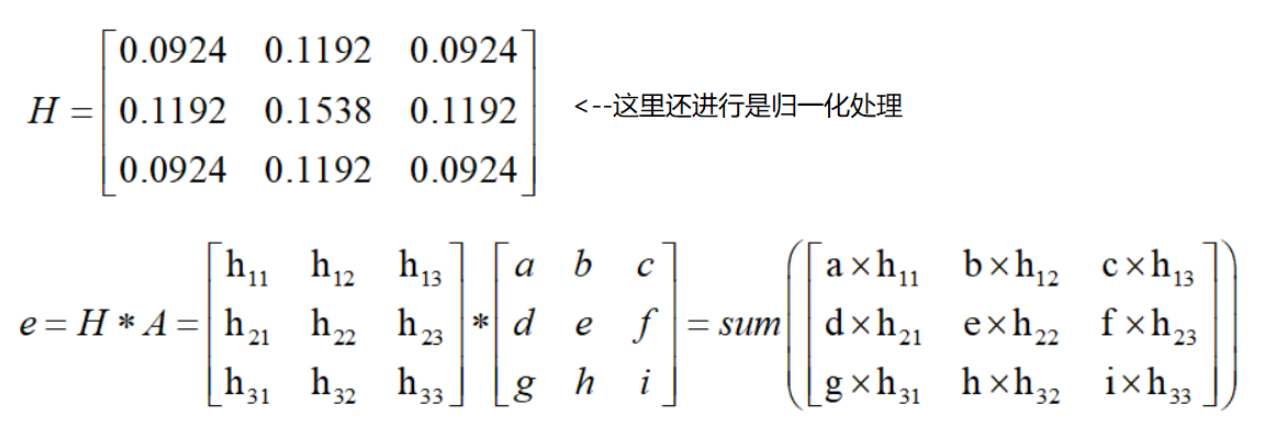
高斯滤波器:高斯滤波器靠近的中心点的权重比较大,较远中心点的权重比较小
-
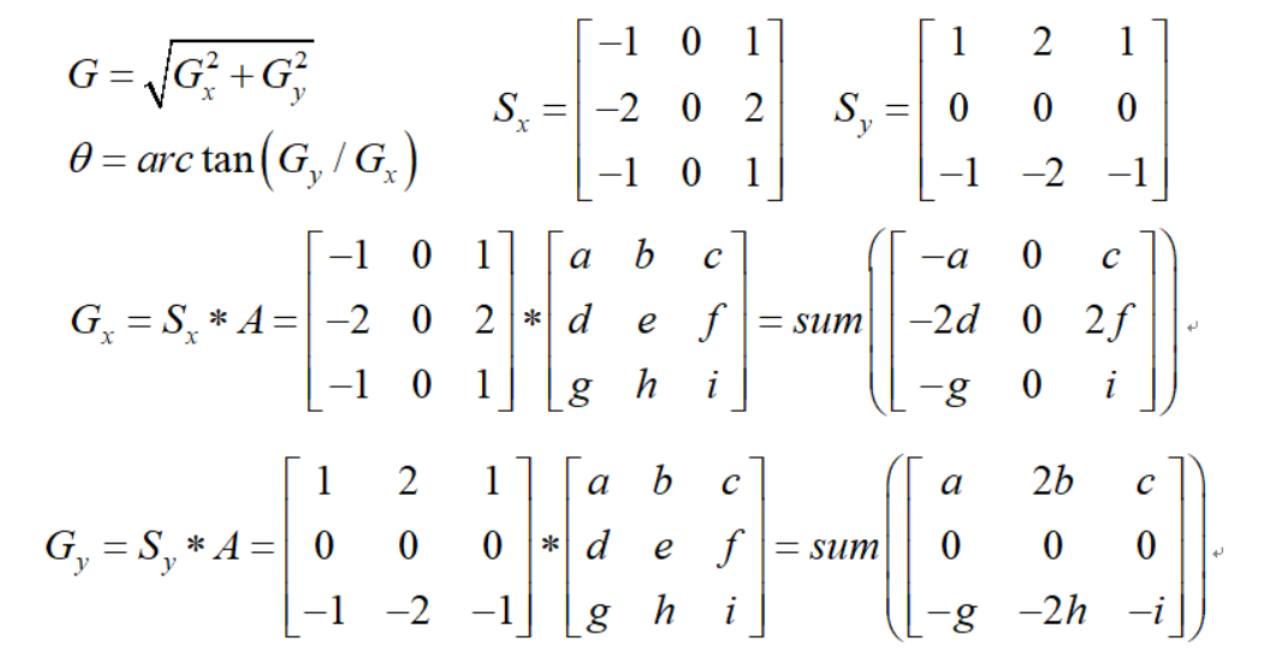
梯度和方向
-
非极大值抑制
C 点的梯度和方向可以通过前一步算出来。
C 点的梯度是不是一个极大值点,应该是去跟它的临近点去比较。
利用 C 点梯度的方向,可以得到上面有一个交点 Q,下面有一个交点 Z,如果 C 点的梯度比 Q 和 Z 都大,那么 C 就是极大值点,其中 Q 和 Z 的梯度值通过线性差值法来计算。
如果 C 的梯度是极大值点,那么 C 就是边缘点。否则 C 不是极大值点,就会被抑制

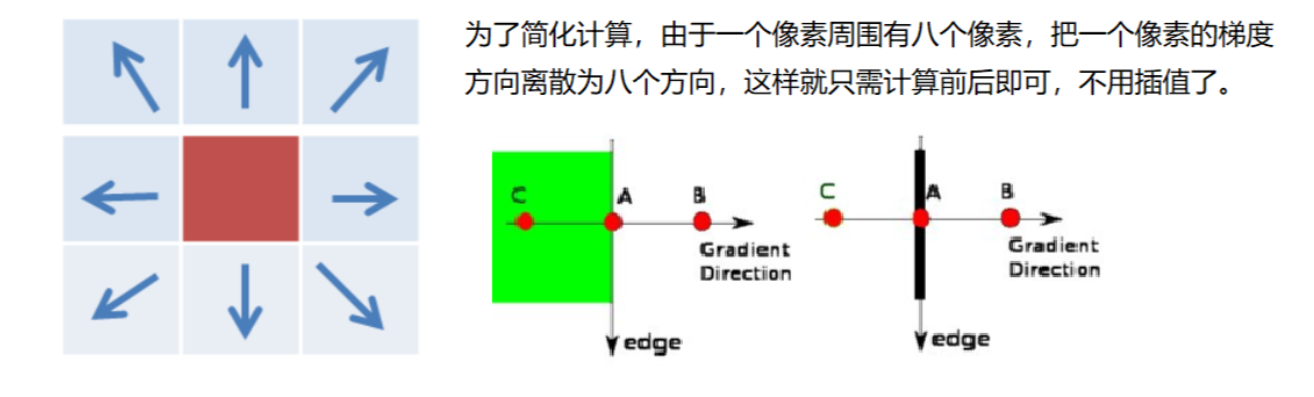
简单计算将像素点周围固定为八个像素,当梯度角度相交的点与哪个方向近,就哪个方向的两个点。
例如,梯度方向是 43° 就取上下两个像素来做极大值判断,如果梯度方向是 46°,就取左下、右上两个像素来做极大值判断。
如下图所示,如果 A 的梯度值比 B 和 C 都要大,那么 A 就是边界,由于边界与梯度方向垂直,所以如下图所示黑色为边界。
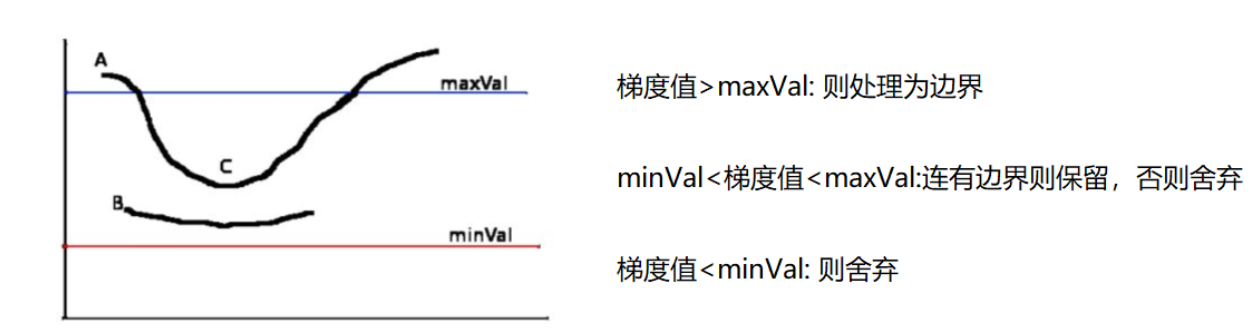
- 双阈值检测
C 在 minVal 与 maxVal 之间,是候选边界,若 C 的左右或上下两边连有 A,而 A 是边界,那么定义 C 也是边界。
B 在 minVal 与 maxVal 之间,是候选边界,若B的左右或上下像素都不是边界,那么 B 就被舍弃,不定义为边界。
- 代码案例
import cv2 #opencv的缩写为cv2
import matplotlib.pyplot as plt # matplotlib库用于绘图展示
import numpy as np # numpy数值计算工具包
# 魔法指令,直接展示图,Jupyter notebook特有
%matplotlib inline
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
img = cv2.imread('01_Picture/07_Lena.jpg',cv2.IMREAD_GRAYSCALE)
v1 = cv2.Canny(img,80,150) # 第二个参数为minVal,第三个参数为maxVal
v2 = cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show(res,'res')
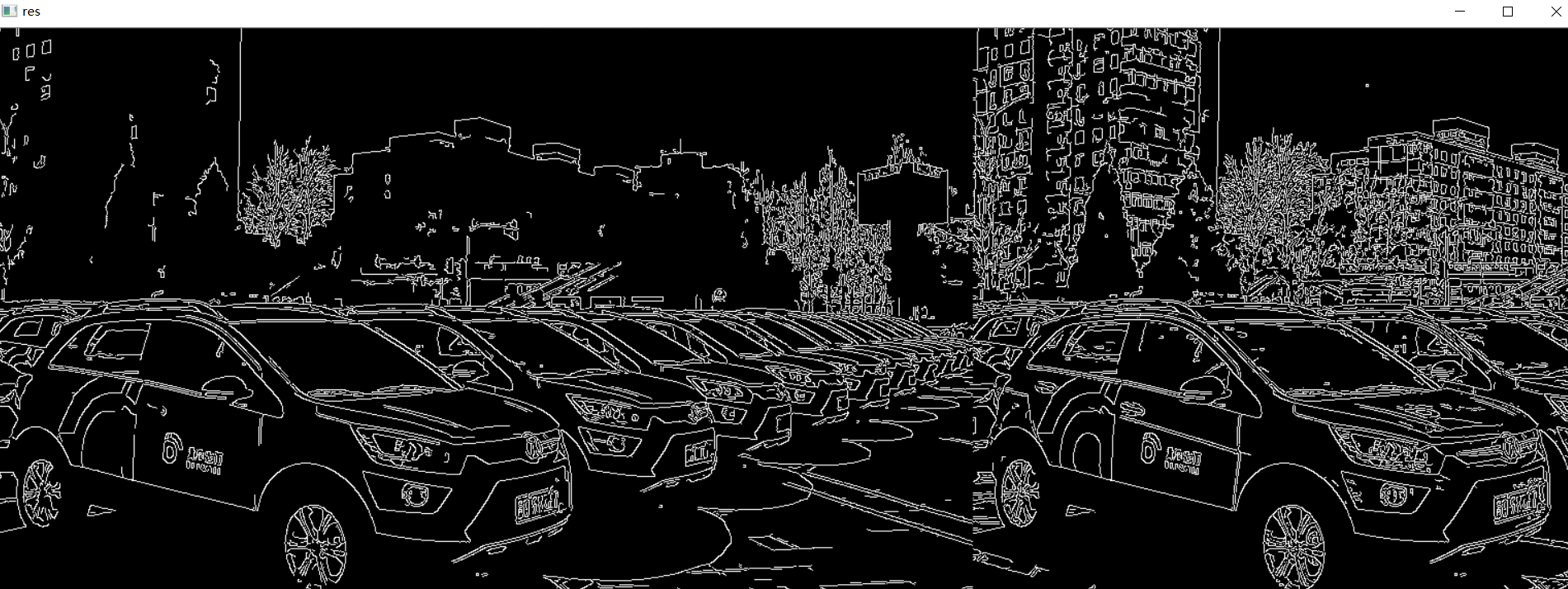
img = cv2.imread('01_Picture/08_Car.png',cv2.IMREAD_GRAYSCALE)
v1 = cv2.Canny(img,120,250) # 第二个参数为minVal,第三个参数为maxVal
v2 = cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show(res,'res')
- 执行结果
点击查看详情


 浙公网安备 33010602011771号
浙公网安备 33010602011771号