pyTorch基础
什么是动量:
在物理学中:动量(Momentum),又称线动量,是物理学中刻画物体运动状态的核心矢量。它定义为物体质量与速度的乘积,表达式为p=mv 。在国际单位制中,动量的单位是千克·米每秒(kg·m/s)。
机器学习中:动量(Momentum)方法通过累积之前梯度的方向来加速梯度下降,使得优化过程更加稳定,并且有助于跳出局部极小值。
核心思想:
加速下降:在梯度一致的方向上,动量累积后能够加速下降,提高收敛速度。
降低震荡:在高噪声或曲率大的方向上(如鞍点附近),动量可以降低震荡,提高优化稳定性。
跨越局部极小值:由于动量累积了之前的梯度信息,在遇到局部极小值时仍然可能继续前进,从而避免陷入局部极小值。
什么是鞍点:数学含义是: 目标函数在此点上的梯度(一阶导数)值为 0
当处于鞍点位置时,由于当前的梯度为 0,参数无法更新。但是 Momentum 动量梯度下降算法已经在先前积累了一些梯度值,很有可能使得跨过鞍点。
由于 mini-batch 普通的梯度下降算法,每次选取少数的样本梯度确定前进方向,可能会出现震荡,使得训练时间变长。Momentum 使用移动加权平均,平滑了梯度的变化,使得前进方向更加平缓,有利于加快训练过程。
正则化
在设计机器学习算法时希望在新样本上的泛化能力强。许多机器学习算法都采用相关的策略来减小测试误差,这些策略被统称为正则化。
神经网络的强大的表示能力经常遇到过拟合,所以需要使用不同形式的正则化策略。
过拟合:是指模型因参数过多而过度适应训练数据,导致泛化能力下降的现象。这种情况下模型可能只是记住了训练集数据,而不是学习到了数据特征。
欠拟合:模型描述能力太弱,以至于不能很好地学习到数据中的规律。产生欠拟合的原因通常是模型过于简单。
目前在深度学习中使用较多的策略有范数惩罚,DropOut,特殊的网络层等
Dropout(随机失活)正则化
在训练过程中,Dropout的实现是让神经元以超参数p(入参,eg:dropout = nn.Dropout(p=0.4),随机失活概率是0.4)的概率停止工作或者激活被置为0,未被置为0的进行缩放,缩放比例为1/(1-p)。
在测试过程中,随机失活不起作用。
批量归一化(BN层)
先对数据标准化,再对数据重构(缩放+平移)
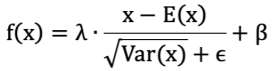
λ 和 β 是可学习的参数,它相当于对标准化后的值做了一个线性变换,λ 为系数,β 为偏置;
eps 通常指为 1e-5,避免分母为 0;
E(x) 表示变量的均值;
Var(x) 表示变量的方差;
批量归一化层在计算机视觉领域使用较多
logits
Logits 是深度学习模型预测过程中最后一层输出的原始值。它们通常是一个未归一化的实数向量,每个值对应一个类别。Logits 的取值范围可以是正数、负数,甚至非常大或非常小的值。
Logits 是模型预测的中间结果。它们本身并非最终的预测值,而需要通过激活函数(如 Softmax)进行归一化,转化为概率分布。模型的优化目标(如交叉熵损失)直接基于 Logits 或其归一化结果进行计算。
criterion = nn.CrossEntropyLoss() #适用于多类别分类问题
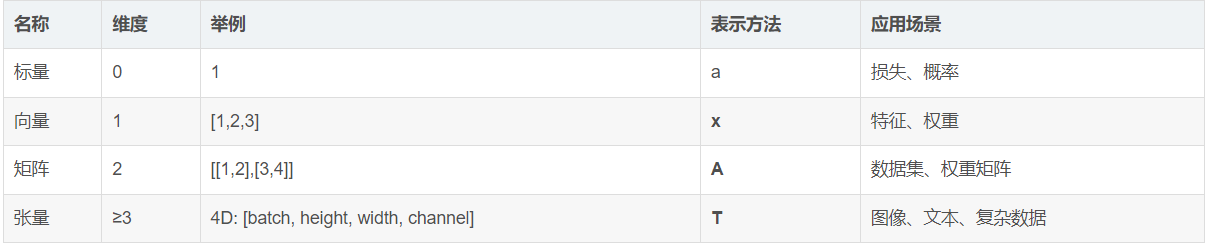
什么是标量,向量,矩阵,张量:
标量:标量就是一个单独的数值。它没有方向,只有大小。
向量(Vector):向量是一组有序的数值,可以理解为一维数组。它有大小和方向。
矩阵(Matrix):矩阵是一个二维数组,由多个向量组成。可以理解为表格。
张量(Tensor):张量是更高维度的数组,标量是一阶张量,向量是二阶,矩阵是三阶,更多维度就是更高阶的张量。
在PyCharm中,张量(Tensor)是PyTorch框架的核心数据结构,本质是多维数组,用于存储和操作数值数据。以下是关键点:
张量的基本概念
- 定义:张量只有一种类型,如果是int型,则张量中所有数据都为int型,并且维度可以是0维,1维,2维,3维等等...,支持任意维度的数值存储 。
张量的基本类型:
(确认张量是几维:0维没有[],几维就有几个[])
0维张量:标量(scalar)
scalar = torch.tensor(7) scalar.ndim
输出:>>> 0
1维张量:向量(vector)
vector = torch.tensor([7, 7]) vector.ndim
输出:>>> 1
2维张量:矩阵(matrix)
MATRIX = torch.tensor([[7, 8], [9, 10]]) MATRIX.ndim
输出:>>> 2
多维张量
TENSOR = torch.tensor([[[1, 2, 3], [3, 6, 9], [2, 4, 5]]]) TENSOR.ndim
输出:>>> 3
说明:
torch.tensor根据指定数据创建张量
import torch # 需要安装torch模块,虚拟环境中已经安装好了
import numpy as np
# 1. 创建张量标量
data = torch.tensor(10)
print(data)
# 2. numpy 数组, 由于 data 为 float64, 下面代码也使用该类型
data = np.random.randn(2, 3)
data = torch.tensor(data)
print(data)
# 3. 列表, 下面代码使用默认元素类型 float32
data = [[10., 20., 30.], [40., 50., 60.]]
data = torch.tensor(data)
#--------------------------------------------
输出结果:
tensor(10)
tensor([[ 0.1345, 0.1149, 0.2435],
[ 0.8026, -0.6744, -1.0918]], dtype=torch.float64)
tensor([[10., 20., 30.],
[40., 50., 60.]])
torch.Tensor根据形状创建张量, 其也可用来创建指定数据的张量
# 1. 创建2行3列的张量, 默认 dtype 为 float32 data = torch.Tensor(2, 3) print(data) # 2. 注意: 如果传递列表, 则创建包含指定元素的张量 data = torch.Tensor([10]) print(data) data = torch.Tensor([10, 20]) print(data) #---------------------------------------------------------- 输出结果: tensor([[0.0000e+00, 3.6893e+19, 2.2018e+05], [4.6577e-10, 2.4158e-12, 1.1625e+33]]) tensor([10.]) tensor([10., 20.])
torch.IntTensor、torch.FloatTensor、torch.DoubleTensor创建指定类型的张量
- 直接创建方法:
- torch.IntTensor():创建int32类型张量
- torch.FloatTensor():创建float32类型张量
- torch.DoubleTensor():创建float64类型张量
- 注意事项:
- 当传入元素类型不正确时会自动进行类型转换
- 示例:torch.IntTensor([2.5, 3.3])会将浮点数强制转换为整数
类型转换的区别
- 两种转换方式:
- data.type(torch.DoubleTensor):通过指定目标类型转换
- data.double():直接调用类型方法转换
- 存储格式说明:
- torch.float64表示数值的存储格式
- torch.DoubleTensor表示创建的是float64格式的张量对象
- 实际应用建议:
- 推荐使用torch.DoubleTensor创建张量
- 数值转换后dtype显示的是存储格式而非对象类型
特殊张量创建
- 全1张量:
- torch.ones():创建指定形状的全1张量
- torch.ones_like():根据已有张量形状创建全1张量
- 全0张量:
- torch.zeros():创建指定形状的全0张量
- torch.zeros_like():根据已有张量形状创建全0张量
- 指定值张量:
- torch.full():创建指定形状和值的张量
- torch.full_like():根据已有张量形状创建指定值张量
- 示例:torch.full([2,3], 10)创建2行3列全为10的张量
线性张量创建
- torch.arange():
- 在指定区间按步长生成元素(左闭右开区间)
- 示例:torch.arange(0, 10, 2) → tensor([0, 2, 4, 6, 8]) 参数第三位含义:隔两步取一个值
- torch.linspace():
- 在指定区间按元素个数均匀生成(闭区间)
- 示例:torch.linspace(0, 11, 10) → tensor([0.0000,1.2222,...,11.0000]) 参数第三位含义:一共取十个值
- 关键区别:
- arange通过步长控制,linspace通过元素数量控制
- arange是左闭右开,linspace是闭区间
指定值张量:
torch.full()
torch.full_like()
_like方法说明:后缀_like表示创建与输入张量形状相同的新张量 ;只关注输入张量的形状,不关心具体数值
张量类型转换
- 转换方法:
- data.type(torch.DoubleTensor)
- data.double()
- 注意事项:
- 类型转换会创建新的张量对象
- 需要根据计算需求选择合适的数值精度
随机张量创建
1)随机数生成
- 随机种子设置:
- torch.random.initial_seed()
- torch.random.manual_seed()
- 正态分布随机数:
- torch.randn():生成标准正态分布的随机张量
矩阵乘法
torch.matmu:广义的矩阵乘法(适用于任意维度张量)
torch.matmul()函数提供了更广泛的矩阵乘法功能,它可以处理任意维度的张量。这个函数会按照张量的维度自动进行合适的乘法操作。
torch.mm():矩阵乘法(只适用于二维张量)
torch.mm()函数用于执行矩阵乘法,但它只适用于二维张量(即矩阵)。如果你试图对高于二维的张量使用torch.mm(),将会得到一个错误。
torch.mul():元素级别的乘法
torch.mul()函数用于执行元素级别的乘法,即对应位置的元素相乘。这个函数对于两个形状相同的张量特别有用。
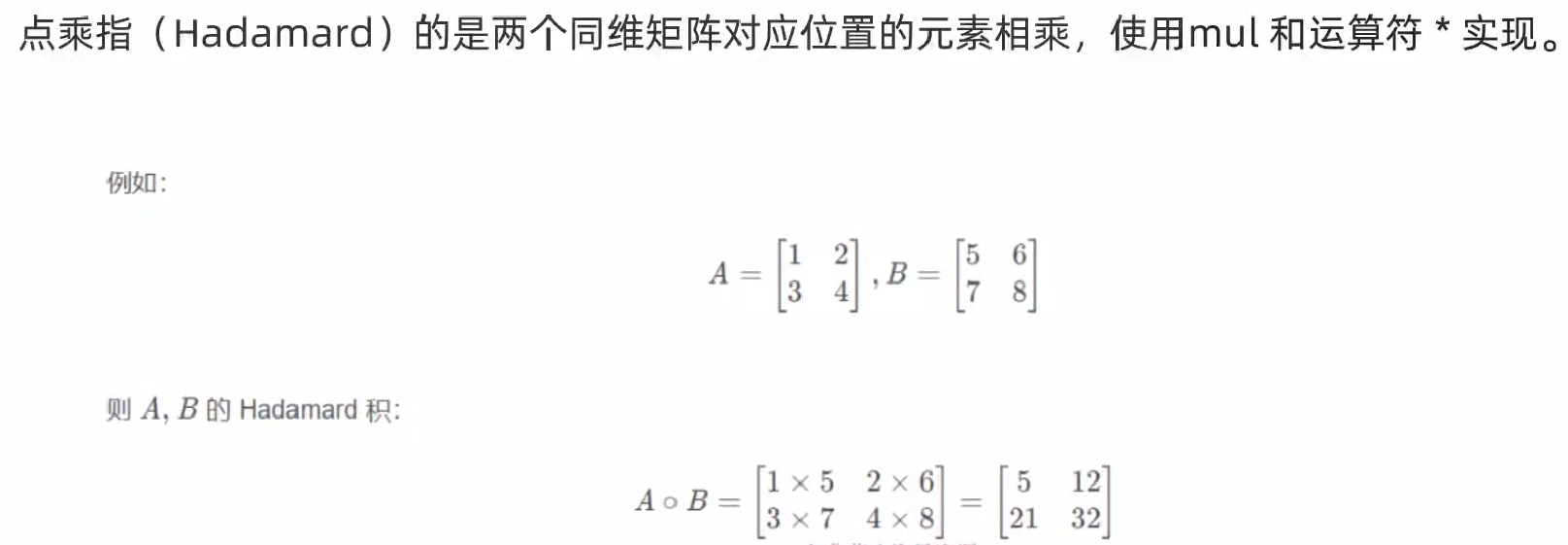
import torch # 创建两个二维张量 matrix1 = torch.tensor([[1, 2], [3, 4]]) matrix2 = torch.tensor([[5, 6], [7, 8]]) # 使用torch.mm()进行矩阵乘法 result_mm = torch.mm(matrix1, matrix2) print(result_mm) # 对于二维张量,torch.matmul()与torch.mm()行为相同 result_matmul_2d = torch.matmul(matrix1, matrix2) print(result_matmul_2d) # 对于高于二维的张量,torch.matmul()可以执行广播和批量矩阵乘法 tensor3d_1 = torch.randn(3, 2, 4) # 3个2x4的矩阵 tensor3d_2 = torch.randn(3, 4, 5) # 3个4x5的矩阵 # 批量矩阵乘法 result_matmul_3d = torch.matmul(tensor3d_1, tensor3d_2) print(result_matmul_3d.shape) # 输出应为(3, 2, 5),表示3个2x5的矩阵
张量与NumPy数组转换
基本方法:使用Tensor.numpy()函数转换,但会共享内存
内存问题:共享内存意味着修改原张量会影响转换后的NumPy数组,反之亦然
通过.copy()函数可避免共享内存问题
data_tensor = torch.tensor([2, 3, 4]) data_numpy = data_tensor.numpy() # 共享内存 data_numpy_copy = data_tensor.numpy().copy() # 不共享内存
使用 torch.tensor可以将ndarray数组转换为Tensor,默认不共享内存。
-
- 张量→NumPy:
- .numpy()共享内存
- .numpy().copy()不共享内存
- NumPy→张量:
- from_numpy()共享内存
- tensor()不共享内存
- 张量→NumPy:
-
- 标量处理:
- 零维张量用.item()获取数值
- 单元素张量同样适用
- 标量处理:
张量基本运算:
包括加减乘除(add/sub/mul/div)和取负(neg)五种基础运算
-
- 带下划线版本:如add_、sub_等会直接修改原数据,等价于+=操作
- 标准版本:如add()会返回新张量,原数据保持不变
常见运算函数
均值计算:数据类型要求:必须为Float或Double类型张量才能计算均值
全局均值:data.mean()计算所有元素的平均值
维度指定:dim=0按列计算,dim=1按行计算
维度指定方法
维度记忆:dim=0表示列操作,dim=1表示行操作;类比理解:类似图像坐标系,编程中行列编号常与数学习惯相反;应用场景:求和(sum)、均值(mean)等统计函数均可指定维度
示例验证:对上述张量按行求和得[11,14],按列求和得[10,3,12]
指数对数运算
平方根:data.sqrt()计算每个元素的平方根;指数运算:data.exp()计算每个元素的自然指数 e^x
对数运算:data.log():以e为底的自然对数;data.log2():以2为底的对数;data.log10():以10为底的对数
幂运算:torch.pow(data, n)计算data的n次方,如平方用2,立方用3
核心函数:sum(求和)、mean(均值)、sqrt(平方根)、pow(幂次)、exp(指数)、log(对数)
记忆技巧:统计类(sum/mean)、代数类(sqrt/pow)、高等数学类(exp/log)
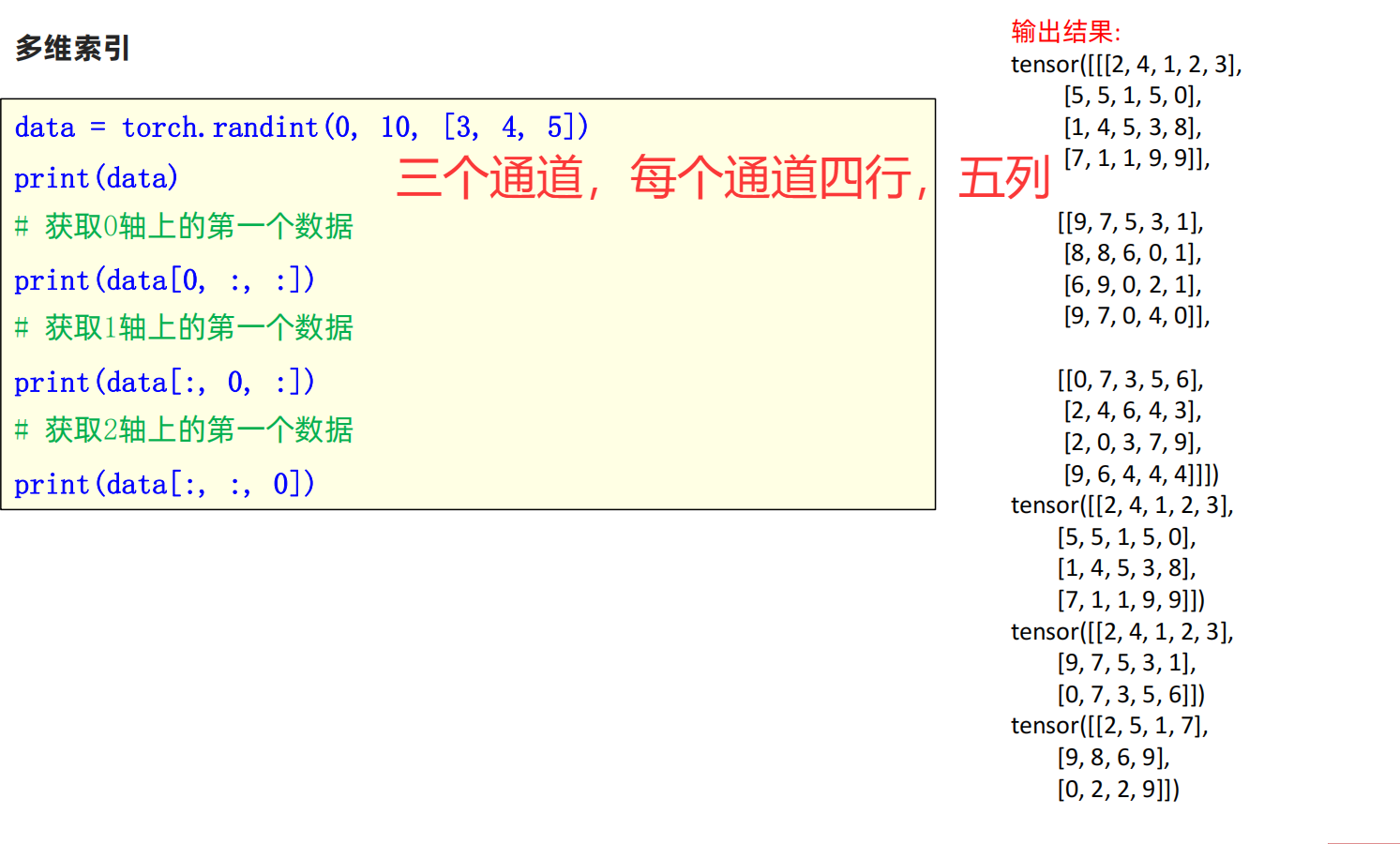
张量索引操作
基本原则:数字从零开始:所有索引计数从0开始,如第0行、第0列;冒号表示全部:data[:,0]表示取所有行的第0列;单值取行:data[0]表示取第0行所有元素;双值取行列:data[行,列]格式,左边是行索引,右边是列索引
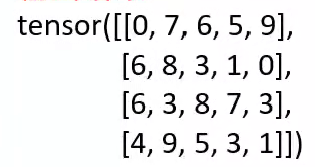
data[0] → tensor([0,7,6,5,9])(取第0行);data[:,0] → tensor([0,6,6,4])(取所有行的第0列)
列表索引
两种形式:对应位置取值:data[[0,1],[1,2]] → 取(0,1)和(1,2)位置的元素(7和3);范围取值:data[[[0],[1]],[1,2]] → 取第0行和第1行的1-2列([[7,6],[8,3]])
关键区别:第一种形式取的是离散的单个元素;第二种形式取的是连续的行列范围组合
范围索引原则
左闭右开原则:data[:3,:2] → 取0-2行(不含第3行),0-1列(不含第2列);data[2:,:2] → 从第2行到最后,取前两列
实际应用:冒号前数字包含,冒号后数字不包含;如data[1:3]取第1、2行(不含第3行)
布尔索引
两种形式:单条件筛选:data[data[:,2]>5] → 筛选第2列值>5的所有行;多条件筛选:data[:,data[1]>5] → 筛选第1行值>5的所有列
reshape函数
功能:在不改变张量数据前提下改变维度形状;可直接获取形状:data.shape或data.size();支持任意合法形状变换:内存连续性:不要求数据存储在连续内存块
import torch data = torch.tensor([[10, 20, 30], [40, 50, 60]]) # 1. 使用 shape 属性或者 size 方法都可以获得张量的形状 print(data.shape, data.shape[0], data.shape[1]) print(data.size(), data.size(0), data.size(1)) # 2. 使用 reshape 函数修改张量形状 new_data = data.reshape(1, 6) print(new_data.shape) ''' 输出结果: torch.Size([2, 3]) 2 3 torch.Size([2, 3]) 2 3 torch.Size([1, 6]) '''
squeeze和unsqueeze函数
squeeze:功能:删除形状为1的维度(降维);示例:tensor([ [1],[2],[3] ]).squeeze() → tensor([1,2,3])
unsqueeze:功能:添加形状为1的维度(升维);维度参数:dim=0:在最前面添加维度;dim=1:在中间添加维度;dim=-1:在最后添加维度;应用场景:图像处理中增加batch维度
transpose和permute函数
transpose:功能:交换两个指定维度;限制:每次只能交换两个维度
permute: 功能:一次性重排多个维度顺序;优势:比多次transpose更高效;内存影响:操作后数据可能变为非连续存储
view和contiguous函数
view函数:
功能:修改张量形状(类似reshape);限制:要求数据存储在连续内存块;不适用场景:transpose/permute后的张量;
torch.view 方法的参数数量是可变的,你可以根据需要传入任意多个参数。每个参数都代表张量在对应维度上的大小。
参数的具体含义:
- 每个参数都是整数,对应新张量在该维度的大小
- 参数-1的特殊作用:表示该维度由PyTorch自动计算,保证总元素数不变
- 参数乘积必须等于原张量元素总数:这是使用view方法的基本前提
实际应用示例:
x.view(3, 2):将张量重构成3行2列1x.view(-1):将张量展平为一维1x.view(-1, 2):自动计算行数,确保有2列1:
contiguous函数:作用:将非连续存储张量转为连续存储;判断连续性:组合使用:通过is_contiguous()方法检测
# 1 一个张量经过了 transpose 或者 permute 函数的处理之后,就无法使用
view 函数进行形状操作
# 若要使用view函数, 需要使用contiguous() 变成连续以后再使用view函数
# 2 判断张量是否使用整块内存
data = torch.tensor( [[10, 20, 30],[40, 50, 60]])
print('data--->', data, data.shape)
# 1 判断是否使用整块内存
print(data.is_contiguous()) # True
# 2 view
mydata2 = data.view(3, 2)
print('mydata2--->', mydata2, mydata2.shape)
# 3 判断是否使用整块
print('mydata2.is_contiguous()--->', mydata2.is_contiguous())
'''
输出结果:
data---> tensor([[10, 20, 30],
[40, 50, 60]]) torch.Size([2, 3])
True
mydata2---> tensor([[10, 20],
[30, 40],
[50, 60]]) torch.Size([3, 2])
mydata2.is_contiguous()---> True
'''
x = torch.arange(6)
print("x->", x)
z = x.view(2, 3)
print("z->", z)
# 使用 reshape 改变形状为 (3, 2)
y = torch.reshape(x, (3, 2))
print("y->", y)
print(y)
'''
x-> tensor([0, 1, 2, 3, 4, 5])
z-> tensor([[0, 1, 2],
[3, 4, 5]])
y-> tensor([[0, 1],
[2, 3],
[4, 5]])
tensor([[0, 1],
[2, 3],
[4, 5]])
'''
张量拼接操作
cat函数使用
基本功能:torch.cat()函数可以将两个张量根据指定的维度拼接起来,不改变维度数。
维度原则:遵循从零开始编号和左闭右开两个基本原则。
- 拼接示例:
- 原始张量:三维张量(1通道×2行×3列)
- dim=0拼接:将两个1通道张量拼接成2通道,结果尺寸为2×2×3
- dim=1拼接:按行拼接,将两行扩展为四行,结果尺寸为1×4×3
- dim=2拼接:按列拼接,将三列扩展为六列,结果尺寸为1×2×6
- 实际应用:在模型训练中需要明确每个维度的拼接方式,理解拼接后的张量形状变化。
import torch data1 = torch.randint(0, 10, [1, 2, 3]) data2 = torch.randint(0, 10, [1, 2, 3]) print(data1) print(data2) # 1. 按0维度拼接 new_data = torch.cat([data1, data2], dim=0) print(new_data) print(new_data.shape) # 2. 按1维度拼接 new_data = torch.cat([data1, data2], dim=1) print(new_data) print(new_data.shape) # 3. 按2维度拼接 new_data = torch.cat([data1, data2], dim=2) print(new_data) print(new_data.shape) ''' 输出结果: tensor([[[7, 8, 7], [6, 3, 6]]]) tensor([[[3, 6, 5], [7, 5, 0]]]) tensor([[[7, 8, 7], [6, 3, 6]], [[3, 6, 5], [7, 5, 0]]]) torch.Size([2, 2, 3]) tensor([[[7, 8, 7], [6, 3, 6], [3, 6, 5], [7, 5, 0]]]) torch.Size([1, 4, 3]) tensor([[[7, 8, 7, 3, 6, 5], [6, 3, 6, 7, 5, 0]]]) torch.Size([1, 2, 6]) '''
自动微分模块
- 计算流程:
- 前向计算得到预测值
z=x∗w+bz = x*w + bz=x∗w+b
- 计算损失函数(如MSE)
loss=MSE(z,y)loss = \text{MSE}(z, y)loss=MSE(z,y)
- 调用loss.backward()进行梯度回传
- 通过grad属性获取梯度值
- 前向计算得到预测值
- 关键属性:requires_grad=True标记需要计算梯度的张量。
- 梯度意义:梯度大小反映参数更新速度,梯度越大表示减小损失的速度越快。
import torch # 1. 当X为标量时梯度的计算 def test01(): x = torch.tensor(5) # 目标值 y = torch.tensor(0.) # 设置要更新的权重和偏置的初始值 w = torch.tensor(1., requires_grad=True, dtype=torch.float32) b = torch.tensor(3., requires_grad=True, dtype=torch.float32) # 设置网络的输出值 z = x * w + b # 矩阵乘法 # 设置损失函数,并进行损失的计算 loss = torch.nn.MSELoss() loss = loss(z, y) # 自动微分 loss.backward() # 打印 w,b 变量的梯度 # backward 函数计算的梯度值会存储在张量的 grad 变量中 print("W的梯度:", w.grad) print("b的梯度", b.grad) ''' 输出结果: # 当X是标量时的结果 W的梯度: tensor(80.) b的梯度 tensor(16.) '''
什么是归一化,什么是标准化?
归一化和标准化是数据预处理中常用的两种方法,旨在消除不同特征间的量纲差异,使数据更适合算法处理。归一化(Normalization) 通常将数据线性缩放到固定区间(如),而标准化(Standardization) 则通过调整数据分布使其均值为0、方差为1。
归一化的定义与特点
归一化通过最小-最大缩放将数据映射到特定范围,公式为:
x′=x−min(x)max(x)−min(x)x′=max(x)−min(x)x−min(x)
其中 xx 为原始数据,x′x′ 为归一化后的值。其核心特点是:
- 缩放范围固定:结果严格限定在预设区间(如),便于直观比较。
- 对极值敏感:最大值和最小值易受异常点影响,鲁棒性较差,适合数据分布稳定、无极端值的场景。
标准化的定义与特点
标准化(如Z-score标准化)通过计算均值和标准差调整数据分布,公式为:
x′=x−μσx′=σx−μ
其中 μμ 为均值,σσ 为标准差。其核心特点是:
- 分布中心化:处理后数据均值为0,方差为1,符合标准正态分布。
- 抗干扰性强:异常值对均值的影响较小,适合噪声较多或数据分布未知的场景。
主要区别
- 缩放依据:
- 归一化依赖数据极值(最小/最大值)。
- 标准化依赖整体统计量(均值和标准差)。
- 归一化依赖数据极值(最小/最大值)。
- 输出范围:
- 归一化结果固定。
- 标准化结果无固定范围,可能超出[-1,1]。
鲁棒性(是系统、算法或事物在面临异常、不确定性或意外情况时,仍然能够保持其功能、性能以及稳定性的能力):
- 归一化结果固定。
- 归一化易受异常值干扰。
- 标准化对异常值更稳健。
参考:
原文链接:https://blog.csdn.net/weixin_41599072/article/details/143169138
https://blog.csdn.net/IT_ORACLE/article/details/146803548

 浙公网安备 33010602011771号
浙公网安备 33010602011771号