ros工作标准前奏
1.创建工作空间与功能包
工作空间(workspace)是一个存放工程开发相关文件的文件夹。
src 代码空间 (Source Space)
build 编译空间(Build Space)
devel 开发空间(Development Space)
install 安装空间(Install Space)
具体操作命令
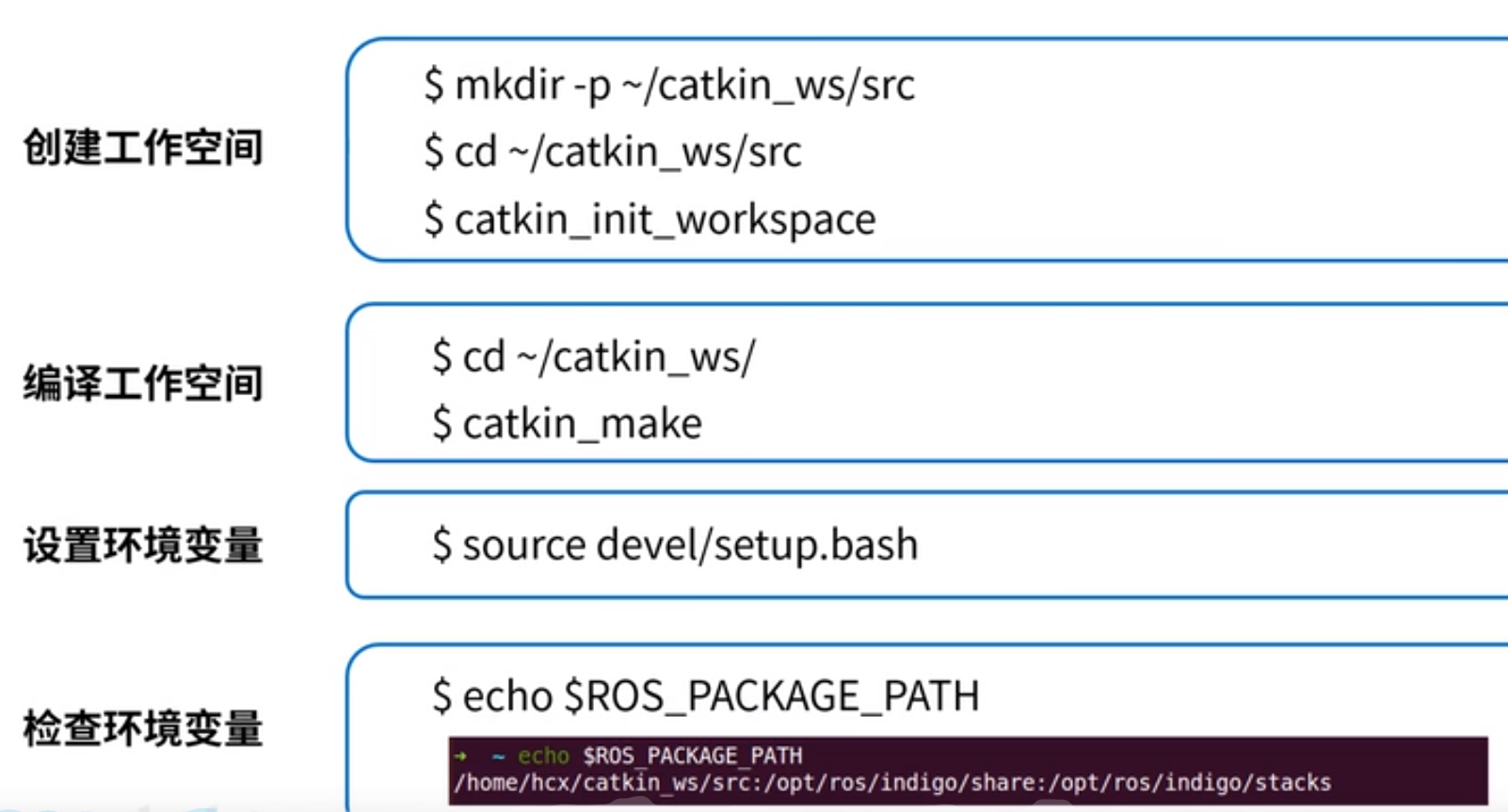
初始化工作空间后产生CMakelists.txt
创建功能包
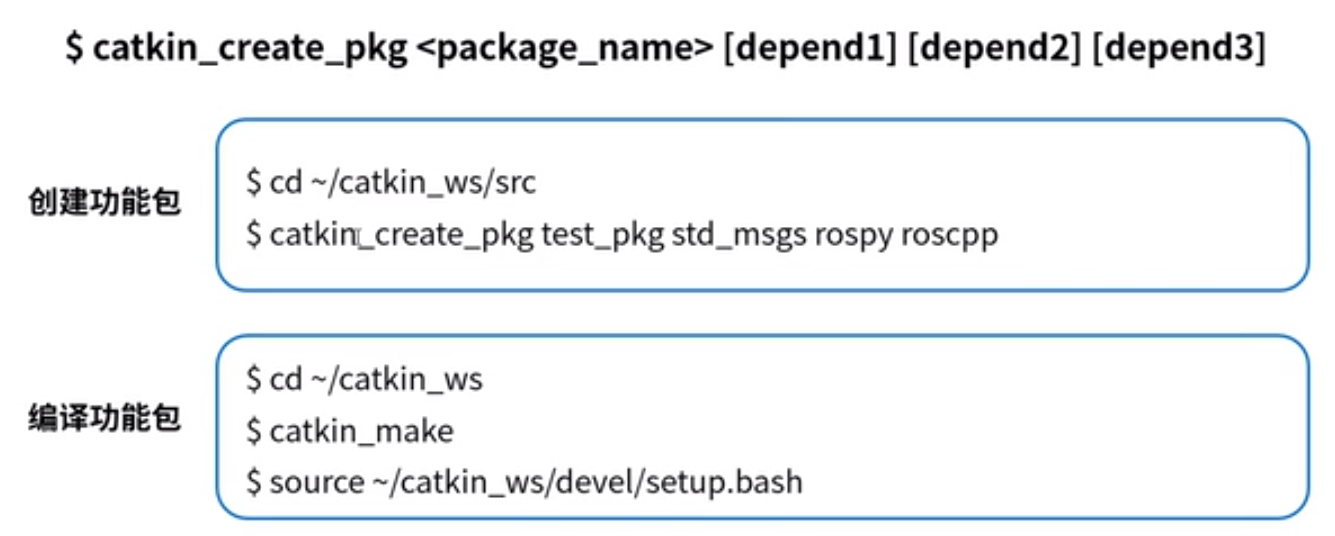
同一个工作空间下,不允许存在同名功能包。
创建功能包后会产生CMakeLists.txt(编译规则……)和package.xml(包信息,依赖文件……)
发布者publisher编译实现:

在src下写c++程序如下:

配置CMakeList.txt(记录编译规则,设置链接库),打开文件夹复制下面
到building下的位置。
第一行含义:把xx.cpp编译成xx.
第二行含义:文件与包做链接。
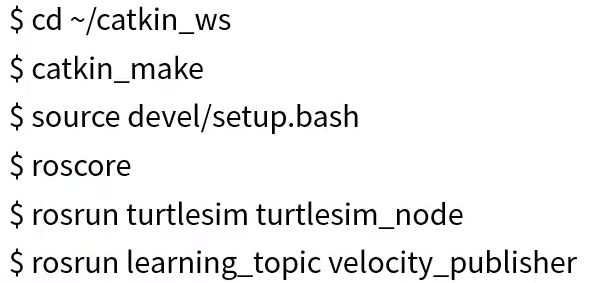
第二行:编译
第三行:设置环境变量
可以在.bashrc下设置把第三行加入(写好有效路径),以后可以省略步骤。
**********************************************************
订阅者Subscriber的编程实现:
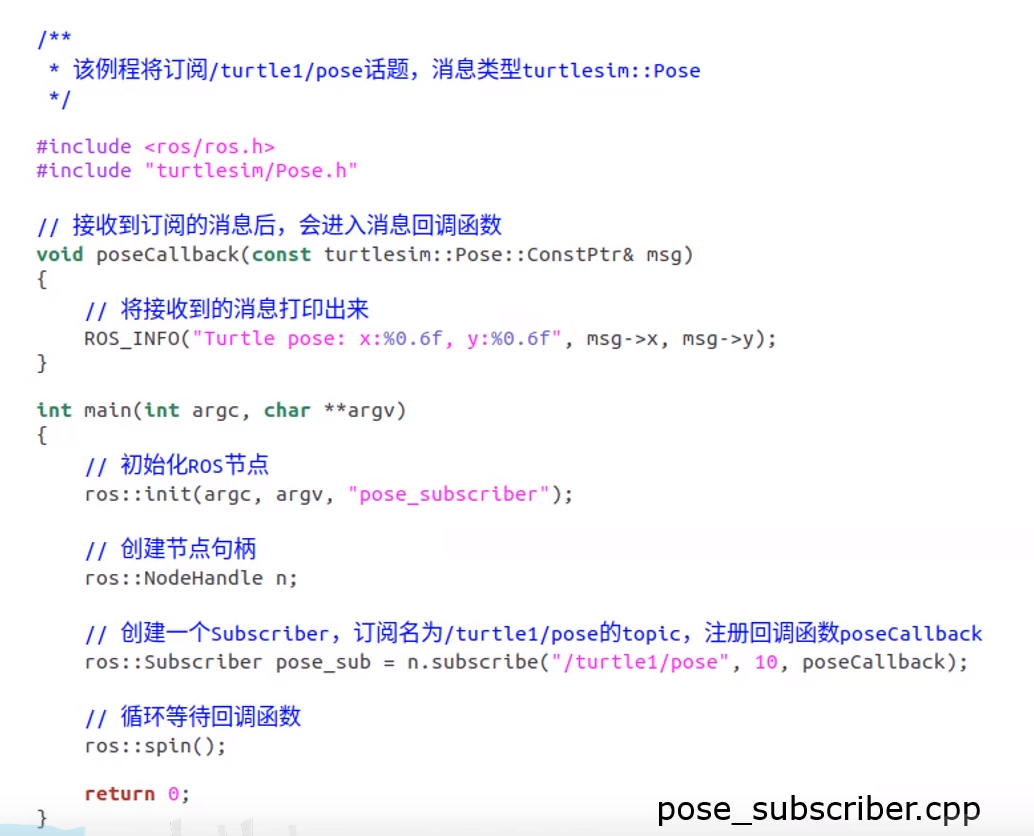
同上修改CMakelists.txt。
测试也同上 编译,系统变量,运行。
新手尝试

 浙公网安备 33010602011771号
浙公网安备 33010602011771号