ros基础命令行介绍
常用命令:
rostopic
rosservice
rosnode
rosparam
rosmsg
rossrv
---------------------------------
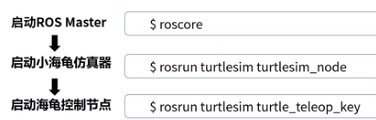
海龟仿真
rqt_graph aqt开头的都是一些可视化工具。可以看到系统的全貌。
rosout 采集所有节点的日志信息,提供给上面界面做显示的。 默认的话题。
rostopic pub -r[频率] /turtle1/cmd_vel geometry_msgs/Twist【两下tab 补全,填写信息】
linear 线速度,angular角速度,theta 初始角
rosservice call /spawn 【两下tab 补全,填写信息】
rosbag record -a -O cmd_record 记录所有数据。保存数据在当前终端的默认路径。(生成.bag后缀文件)
rosbag play cmd_ record.bag 记录数据复现。
新手尝试

 浙公网安备 33010602011771号
浙公网安备 33010602011771号