让无人机“未造先飞”:重塑无人机研发范式
• 软件必须等硬件到位才能开展真实调试
• 系统验证必须依赖外场实测
• 高风险场景的测试往往依赖“勇气”而非充分验证
尤其是在任务管理计算机(Mission Management Computer,MMC)的研发过程中,软件必须等到真实硬件、真实总线与真实飞控等节点全部就位,才能开始系统级联调;而飞控系统状态边界、链路切换、操作流程等关键场景,往往只能在外场一次性验证,难以复现与深入分析。同时,培养一名合格飞手也需要消耗大量真机时长,成本高昂、周期漫长。
基于天目全数字实时仿真软件SkyEye所构建的新研发体系,则围绕“任务管理计算机的数字化仿真”实现了关键转变——使无人机研发从硬件驱动走向软件先行,真正实现:
未造先飞、未装先测、未训先会。
01. 传统模式下的“三座大山”
1.软件进度受限于硬件
任务管理计算机软件无法脱离实体机载硬件运行,参数调整或逻辑优化均需等待整机、场地与人员就位,研发节奏被动。
2.高风险测试场景难以覆盖
如链路中断重连、飞控权限切换、发射流程等高危场景,缺乏可控、可复现的测试手段,系统潜在问题难以提前暴露。
3. 外场试验成本高、约束多
空域、天气、保障资源等均构成限制,每次外场调试都意味着高昂的时间与经济成本。
4. 人员训练难以模拟真实系统逻辑
传统飞行模拟器虽然界面仿真度高,但底层逻辑常被简化,无法真实模拟任务系统在复杂故障或链路异常等场景下的软件行为,训练效果受限。
究其根本,传统研发模式过度依赖实物系统,关键功能验证必须基于真实硬件与外场环境,导致效率低、风险高、迭代慢。
02. SkyEye的核心突破:将MMC搬进数字空间
SkyEye的核心能力,是让MMC的嵌入式二进制程序在数字化硬件仿真环境中零改动、零适配、原样运行,实现真正意义上的硬件等效级全真实执行,而非传统模型化或流程化的模拟。
具体而言,平台实现:
- 处理器指令集精确仿真:完整仿真PPC架构,支持VxWorks实时操作系统,确保任务管理计算机软件如同在真实硬件上一般启动、调度与执行。
- 全接口协议高保真模拟:对1553B、RS422、离散量等机载总线与接口进行时序与协议层面的精确仿真,通信协议、数据、帧格式、时序与真实硬件保持一致。
- 与全系统无缝集成:通过DDS等中间件,将运行在数字平台上的MMC与其他仿真节点(如飞管、导航、载荷、雷达等)进行数据与时钟同步,构建完整的无人机系统仿真环境。
这意味着:
MMC的“大脑”在实验室中已完全激活,软件在系统集成前即可开展真实、闭环的系统验证。
03. SkyEye如何支撑全数字无人机的构建?
尽管全数字无人机由多个子系统共同构成,但SkyEye在其中扮演了“数字心脏”这一核心角色——它承载并运行真实的MMC软件,并使其在虚拟系统中作为实际控制核心参与仿真闭环:
1. MMC(SkyEye承载)
- 运行最终版二进制程序
- 仿真PPC处理器与VxWorks运行环境
- 高保真模拟1553B、RS422、离散量等接口
- 经由DDS与其它仿真节点实时交互
2. 其他系统节点(源码/功能级仿真)
- 飞管计算机、导航、光电、雷达等系统以高精度源码/功能级形式参与仿真
- 各模型通过DDS与任务管理计算机进行数据与时钟同步,形成完整逻辑链
- 所有节点的数据流、协议格式、消息频率、数据时序均与真机一致
3. 真实地面站与视景系统
- 接入真实操纵台、摇杆与显示界面,飞控/载荷/任务等界面全部与真实一致
- 配合实时三维视景,构建沉浸式任务环境
4. 实验室里的数字试飞到底多“真”?
走进操作实验室,你可能会看到这样的画面:
- 前方是与真机完全一致的地面控制站:摇杆、飞参界面、三维视景和实机一模一样;
- 身后是一排计算机,其中一台正运行PPC架构仿真模块——客户MMC的二进制程序在此高速运转;
- DDS总线流动着与实机一致的1553B数据包,飞控、载荷、数据链像真实飞机一样协同工作;
- 操作员推动摇杆,无人机从跑道起飞,三维画面同步呈现高速飞行的环境画面,画面实时跟踪目标,雷达同步生成高分辨率图像,地面控制站显示的飞参(高度、速度、链路状态)与实飞时保持一致。
在这样的体系下,操作员可在实验室内完成从起飞、航路执行、目标识别、链路中断应对到流程演练的完整任务,且MMC核心任务逻辑均由真实软件所驱动,既是工程验证平台,又是飞行培训系统,更是任务流程验证环境。
04. 研发模式对比:从硬件依赖到数字先行
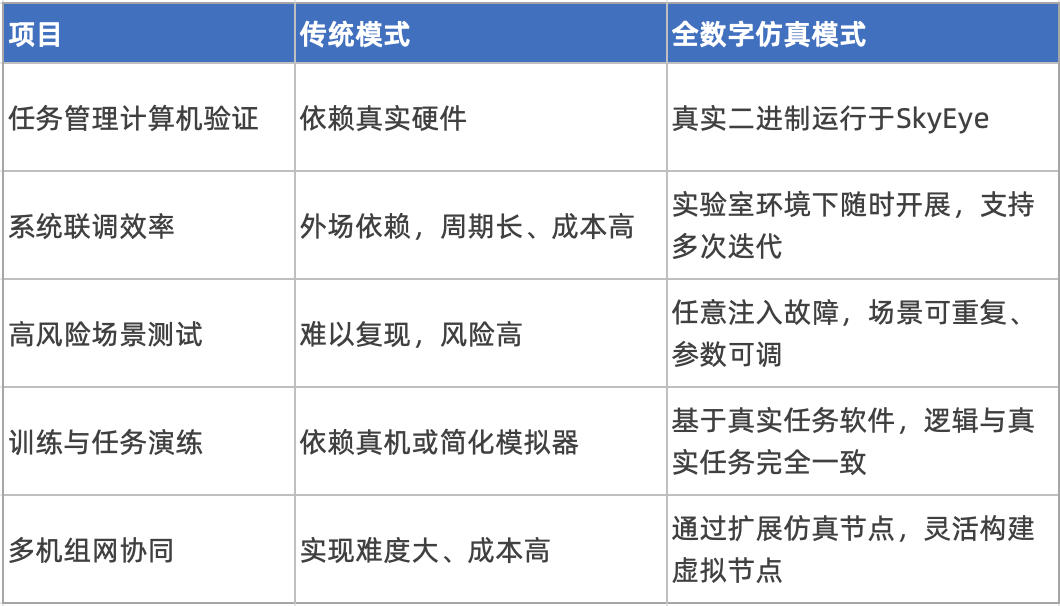
核心结论:
SkyEye通过对MMC的精准仿真,将系统验证与软件开发前移,使无人机研发从硬件依赖式串行转向数字引领式并行。
05. 结语:从靠实物验证到用数字赋能
SkyEye不仅是一种工具升级,更是一种研发理念的重构。它让MMC在硬件尚未制造时便可活在数字空间,提前接受真实任务的考验,实现系统逻辑的充分验证与人员训练的有效前置。
在这样的体系支撑下,无人机系统得以在数字世界中反复飞行成千上万次,不断优化软件逻辑与任务流程,从而在现实世界的首飞中飞得更稳、更准、更可靠。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号