分析:轮足混合式机器人 —— 逐际动力 —— 目前最为切实可行的轮足结构设计
最近看到逐际动力公司推出的一款轮足混合式机器人,感觉比较新奇。轮足机器人理论上虽然在全地形场景下有更好的性能表现,但是往往由于其物理结构问题难以解决导致其落地时性能十分鸡肋,虽然有着轮式机器人在平地上上的快速移动能力,但是在负载能力和续航能力上都难以和纯足式机器人相比,而在越野地形时由于没有完整的脚掌结构因此并不难适用野外复杂的环境,并且轮足结构的组合导致其不论是切换成轮式行走还是足式行走其性能都无法和完全的轮式机器人和足式机器人先比。虽然轮足机器人在物理结构上有着较大缺陷,但是轮足结构确实可以同时适应一定难度的轮式机器人环境和足式机器人环境,其实对于轮足机器人的设计一直难有切实落地的方案和产品,尤其是在轮足切换时到底应该采用何种物理结构也是莫衷一是的,虽然直接用轮结构替代足式机器人的脚掌结构有诸多不足,但是目前来看这个解决方案是最为易操作和可行的。
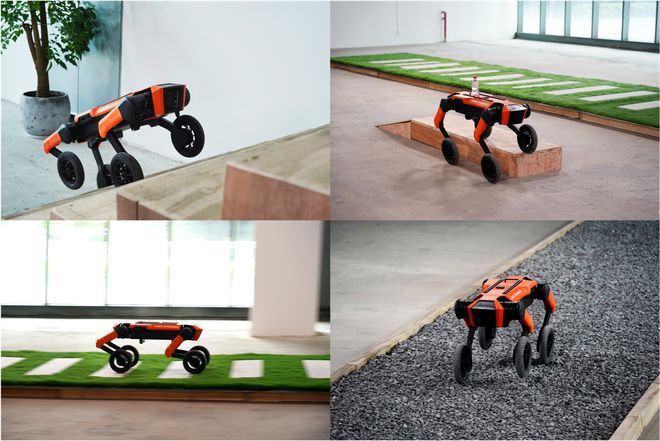
智能实体机器人最重要的两方面能力,即环境感知与运动控制;轮足机器人在足式运行时可以安装learning-based方式通过强化学习方法来进行决策控制,而在切换为轮式运动式则可以切换为model-based方式通过传统的模型预测控制方式来进行决策控制,可以说该种设计在软硬件方面都采用了一种最为切实可行的方式。
由于直接使用轮替代脚掌设计的轮足机器人可以根据环境感知来进行具体的运行模式的切换(强化学习方式or模型预测控制方式),因此该种设计对于环境感知的要求更高,机器人必须准确的判断出当前所处的环境究竟应该采取足式运行方式还是轮式运行方式。
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2024-03-23 10:00 Angry_Panda 阅读(537) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号