【转载】 无人机的四旋翼为什么不能运用到大型有人直升机上?
原文地址:
https://baijiahao.baidu.com/s?id=1599790734088854162&wfr=spider&for=pc
------------------------------------------------------------------
1、无人机的四旋翼系统从气动上来说是静不稳定的,也就是说哪怕四个电机和螺旋桨的功率、转速、升力一模一样,重心也在绝对的中心点上,在遇到稍微一点扰动的时候(此时排除飞控的主动补偿),四旋翼系统就会偏离平衡状态,并且无法依靠气动布局本身恢复平衡。
所以,四旋翼系统需要搭载“姿态传感器--飞控--电机&桨”的一整套负反馈系统来维持飞机的平衡,这套系统的特点就在于它是采用控制电机转速进而改变螺旋桨升力的方法来维持平衡状态的,所以除了电机完全没有任何机械装置,相对于常规直升机旋翼的复杂控制机构,四旋翼这一套几乎完全由电子装置组成的反馈控制系统显得特别简洁而可靠,更由于电子工业尤其是芯片产业的飞速发展,成本飞速下降,使其成为一种廉价而可靠的小型无人机的解决方案。

2、为实现四旋翼的稳定飞行,“姿态传感器--飞控--电机&桨”这套反馈系统必须满足一些特定的条件,比如:系统响应速度就是最重要的一点。在四旋翼飞机遇到扰动偏离平衡状态的时候,反馈系统必须在很短的时间内检测到飞机的偏离状态并解算出恢复平衡所需的“解决方案”,然后迅速改变各个电机转速来纠正飞机的姿态。这个过程顺利实现的前提就是系统响应速度要足够快!可以想象:如果系统响应过于迟缓,那么当飞控解算出“解决方案”并指挥电机改变转速的时候,飞机的姿态已经发生了更大的变化,导致之前的解决方案已经过时,那飞机就无法回复到平衡状态,进而进入失控的状态。所以,对四旋翼系统而言,响应速度是至关重要的。而响应速度在传感器和飞控这两个纯电子部分的延时是非常有限的,主要矛盾都集中在电机&桨这个机械装置部分:由于惯性和空气阻尼的存在,电机的转速增加或减少相对于电子系统而言是很缓慢的,为改善这个问题,工程师们也想了很多办法,最常见的两种:(1)、增大电机的功率并减小螺旋桨的惯量与阻尼,尽可能形成“大马拉小车”的格局以增加电机&桨系统的增速斜率。(2)、增加电子刹车等功能,满足电机&桨系统的减速斜率。OK!响应速度的问题终于解决了,但是却带来一个问题:由于采用“大马拉小车”的匹配格局,四旋翼飞机在正常飞行的状态下,实际上电机功率(转速)都处于中间状态,也就是要留下足够的功率用来增速,所以导致四旋翼系统的功率--载荷效率很低,因为一小半的功率都是用来储备着随时纠正飞机姿态用的!

3、当四旋翼系统的尺度增大,电机&桨的转动惯量和空气阻尼都会随之增大,系统响应速度会迅速恶化,当尺寸增大到一定程度以后,就会导致响应速度完全跟不上需要,四旋翼这套电子反馈控制系统就会失效。所以,我们可以看到国内外研发大功率多旋翼系统的时候,很多都采用了变距桨的方案,也就是通过改变桨距来改变升力的方式来维持平衡;这种方式的好处是:在大尺寸大功率的情况下响应速度能满足要求,其次功率--载荷效率会比较高,因为改变桨距来改变升力的方法不需要太多的储备功率用来纠正姿态---虽然增加桨距也需要增加一定的功率来维持转速,但是比单纯依靠提升转速来增加升力的方式所需的储备功率少得多!但是带来的问题就是机械结构复杂程度大大提高了,给整个系统的可靠性带来了风险,而且成本也高得多!

4、当四旋翼系统尺度增大到与载人直升机相当的地步时,更严重的事情出现了!那就是随着桨叶直径的增大,桨叶外端的线速度很快就要接近或者超过音速!这就产生了一个很矛盾的问题:桨叶转速的正负调整区间有了一个上限,而且这个上限离正常飞行时的数值不远!也就意味着转速增加的区间很有限;但是飞控系统没办法在这么小的转速区间里做出足够精度的控制。比如说:原本增加转速的区间是五千转每分钟到一万转每分钟,千分之一的转速阶梯就是五转每分钟;而如果大尺寸桨叶的情况下,为避免桨尖超过音速,将正常转速 降低 为三千转每分钟,而音速上限为四千转每分钟,那么千分之一的转速阶梯就是一转每分钟。这个对于飞控来说基本上就是做不到的控制精度!

5、如果在载人直升机的尺度级别采用变距桨的模式来实现多旋翼模式,至少四个变距机构的复杂性跟常规直升机的旋翼控制机构也不遑多让了,而且还有一个问题,多旋翼模式的悬停效率比常规旋翼 低很多,导致载荷能力低下,经济上、技术上都不划算!
综上所述,大尺度情形下,四旋翼(多旋翼)系统的实用性和可靠性都没有优势,甚至某些方面具有劣势,这也是为什么现在没有哪家公司采用多旋翼系统来做大型飞机的原因了。

---------------------------------------------
ps: 看了些四旋翼无人机和自动控制方面的资料,突然间感觉四旋翼真的好高级,因为它已经有了成熟的控制算法使其能进行自动化的前后左右转向,悬停等动作,而这里功能在真实的载人飞机上就很难实现,这不仅需要较高的飞机机械电气化的设计而且还需要高水平的驾驶水平的飞行员。那么既然四旋翼无人机已经可以实现这些功能了,那么我们直接把这些功能放到现在的真实载人飞机上是不是也能实现这些功能呢,这样飞机驾驶门槛就不像现在那么高不可攀,那是一个十分有意义的事情,就算四旋翼的控制算法可能由于飞机机构问题不能应用到现在的载人飞机上,那么我们重新设计一种可以载人的四旋翼飞机是不是也是一个可行的方案呢。带着这些疑问在网上搜到了上面的文章解答了自己的疑惑。
可能自己理解不充分,说下看了文章的想法:
四旋翼飞机本身工作效率不高,四个螺旋桨而且都是不能全功率工作,甚至为了调整飞机姿态需要留出可能近一半的功率。由于四旋翼无人机没有采用电气化设计,或者说不像有翼飞机或直升机那样有控制飞机姿态的机械电气化的操作,四旋翼调整自身姿态是需要不停的调整不同螺旋桨转数来实现的,如果遇到较为复杂的飞行环境,如多风和复杂气流的情况那么对螺旋桨转数的调整将会更加的频繁,这种情况难以使用非电力的动力设备如加燃油的发动机,同时就是使用大型的电力发动机对其高频的切换转数也是一个较大的负荷,难以胜任较为复杂的航空环境,同时由于其能效不高且难以使用燃油型的动力系统所以续航能力也是较差的。总的说来,四旋翼飞机给适用于航空环境简单的,续航能力要求较低的环境中,所以载人飞行难以适用的。
而四旋翼的广泛应用可能并不是飞机设计技术和控制技术上多么的进步,而更多的是电子元器件的价格低廉化和小型化带来的发展机遇。不论是传感器还是电机都是比较亲民的价格,当然大疆的飞控和炭纤维的机身不属于这情况。
看来简单的飞行器设计和控制系统其适应性也是有限的。
桨距的解释: https://zhidao.baidu.com/question/15974623.html
螺旋桨的桨叶都与bai旋转平面有一du个倾角。假设螺旋桨在一种不能流动的zhi介质中旋转,那么螺旋桨每转dao一圈,就会向前进一个距离,连续旋转就形成一段螺旋。同一片桨叶旋转一圈所形成的螺旋的距离,就称为浆距。显然,桨叶的角度越大,浆距也越大,角度与旋转平面角度为0,浆距也为0。这个“距”,就是桨叶旋转形成的螺旋的螺距。
----------------------------
对于桨距,感觉网上有个说法靠谱些,就是桨距和汽车档位有些像,高桨距相当于低档位,低桨距相当于高档位。高桨距时拉力大,低桨距时拉力小。所以就是高速度时候用低桨距,低速度时用高桨距。不过这个解释没有验证是否正确。
关于变距螺旋桨的视频:
https://www.bilibili.com/video/BV1P7411Z7BQ/?spm_id_from=333.788.videocard.0
--------------------
虽然四旋翼控制系统在载人飞机上有太多的限制,但是由于其有较好较成熟的控制算法,因此在载人飞机上也有一些公司在进行探索,如亿航184,https://baike.baidu.com/item/%E4%BA%BF%E8%88%AA184/19250302?fr=aladdin

以上来源:https://tech.qq.com/a/20160108/009870.htm
根据资料可知:
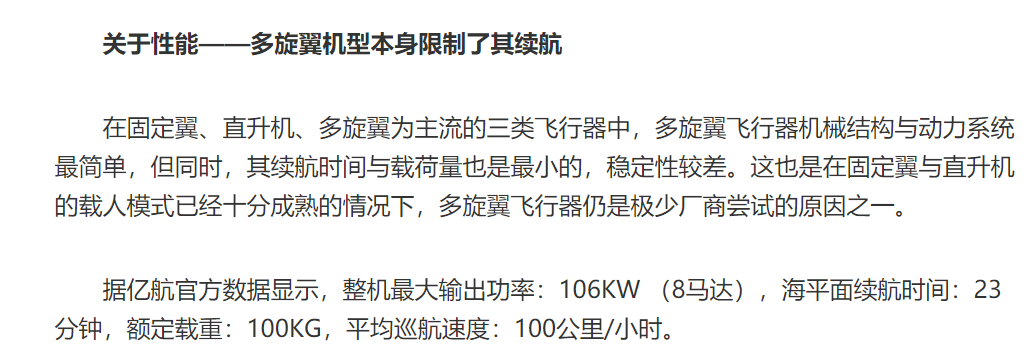
在固定翼、直升机、多旋翼为主流的三类飞行器中,多旋翼飞行器机械结构与动力系统最简单,但同时,其续航时间与载荷量也是最小的,稳定性较差。这也是在固定翼与直升机的载人模式已经十分成熟的情况下,多旋翼飞行器仍是极少厂商尝试的原因之一。
由此可见现阶段的四旋翼载人飞机还是在探索阶段,难以有实际应用,毕竟这东西各方面的性能和几千块的无人机基本差不多,无非就是个头更大了些,可以放个人进去了。
--------------------------------------------------
posted on 2020-08-25 15:41 Angry_Panda 阅读(1534) 评论(1) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号