
MCAL
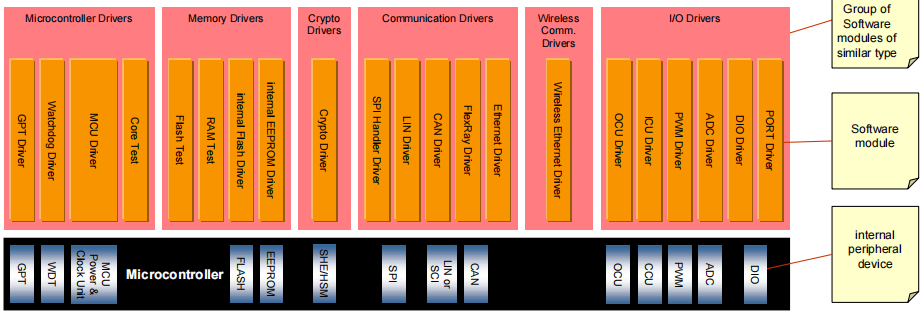
Microcontroller Drivers
组成/分类:
- General Purpose Timer(GPT) Driver
- Watchdog Driver
- MCU Driver
- Core Test
其中,有内部外设驱动,比如:Watchdog、General Purpose Timer(GPT);
直接访问MCU的函数,比如:Core test。
Memory Drivers
组成/分类:
- Internal EEPROM Driver
- Internal Flash Driver
- RAM Test
- Flash Test
主要是片上存储设备驱动,比如:Internal Flash、Internal EEPROM;
以及内存映射的外部存储驱动设备,比如:External Falsh。
Crypto Drivers
组成/分类:
- Crypto Driver
片上加密设备的驱动,比如:SHE、HSM。
Communication Drivers
组成/分类:
- Ethernet Driver
- FlexRay Driver
- CAN Driver
- LIN Driver
- SPI Handler
主要是ECU板上驱动,比如:SPI;
和汽车通信的驱动,比如:CAN;
以及OSI-Layer:数据链路层的一部分。
Wireless Communication Drivers
组成/分类:
- Wireless Ethernet Driver
主要是无线网络系统的驱动(车载或非车载通信)。
I/O Driver
组成/分类:
- PORT Driver
- DIO Driver
- ADC Driver
- PWM Driver
- ICU Driver
- OCU Driver
主要是模拟和数字I/O的驱动,比如:ADC、PWM、DIO。
SPIHandlerDriver of MCAL
SPIHandlerDriver允许多个客户端对一个或多个SPI总线进行并发访问。

为了抽象出专用于芯片选择的SPI微控制器引脚的特性/功能,这些特性/功能应该直接由SPIHandlerDriver直接处理。这意味着,这些CS引脚在DIO驱动中不可用。
MCAL的SPIHandlerDriver可被ECU抽象层的多种/多个功能模块调用,例如:

Complex Drivers
一个Complex Driver是一个在基础软件栈中实现非标准功能的模块。
示例:使用特定的中断and/or复杂的MCU外设(比如:PCP、TPU)直接访问MCU,从而实现复杂传感器检测和执行器控制,比如:Injection control、Electric valve control、Incremental position detection。
主要作用:为操作复杂传感器和执行器实现特定的功能和时间需求。
实现依赖:高度依赖于MCU、ECU和应用软件。
为上层SW-Cs根据AUTOSAR(AUTOSAR interface)提供/实现特定的功能/接口。
对于下层,访问标准化接口时受限。

示例:

ECU Abstraction Layer
I/O Hardware Abstraction
I/O硬件抽象是一组抽象了外围I/O设备(片上或板上)和ECU硬件布局(比如:MCU引脚了解和电平信号倒置)的位置的模块。I/O硬件抽象并不会抽象传感器或者执行器。
不同的I/O设备可能通过一个I/O信号接口访问。
主要作用:
- 表示I/O信号,当I/O连接到ECU硬件时(比如:电流、电压、频率);
- 从更高软件层中隐藏ECU硬件和布局的属性。

示例:

Communication Hardware Abstraction
通信硬件抽象是一组抽象了通信控制器和ECU硬件布局的位置的模块。对于所有通信系统,一个特定的通信硬件抽象是必要的。
主要作用:提供一个相同的机制来访问总线通道,而不必理会总线的位置(片上或者板上)。
实现依赖:独立于MCU,但依赖于ECU的其他硬件(比如板上CAN控制器)和其他外部设备。
其上层依赖于总线,但独立于MCU和ECU硬件。

示例:一个ECU有一个带着两个内部CAN通道的MCU和一个带着4个CAN控制器的板上ASIC(Application Specific Integrated Circuit 特定用途集成电路)。这个CAN-ASIC通过SPI与MCU相连。则可通过总线特定接口(CAN Interface)(在ECU Abstraction Layer上)访问通信驱动(如CAN Driver)而不必理会是片上CAN还是板上CAN,也不用关注是通过MCU的CAN接口还是SPI接口连接的。

Memory Hardware Abstraction
存储硬件抽象是一组抽象了外围存储器设备(片上或板上)和ECU硬件布局的位置的模块。
主要作用:提供一个相同的机制访问内部(片上)和外部(板上)存储设备和存储硬件类型(比如:EEPROM、Flash)。
实现依赖:独立于MCU,但依赖于外部设备。
其上层独立于MCU、ECU硬件和存储设备。

示例:片上EEPROM和外部EEPROM都可以通过相同的机制访问。通过存储器特定的抽象/仿真模块(比如:EEPROM Abstraction)可以访问存储器驱动(On MCAL)。通过在Flash硬件单元上模拟EEPROM抽象,启用了通过内存抽象接口对这两种类型硬件的通用访问。

Onboard Device Abstraction
板上设备驱动包含了不能视作传感器和执行器(比如:内部或外部watchdogs)的ECU板上设备的驱动。这些驱动通过MCAL层访问ECU板上设备。
主要作用:抽象ECU特定的板上设备。
实现依赖:独立于MCU,但依赖于外部设备。
其上层独立于MCU,但部分依赖于ECU硬件。
示例:


Crypto Hardware Abstraction
加密硬件抽象是一组抽象了密码原语(内部/外部硬件,或者基于软件的密码原语)的位置。
主要作用:提供相同的机制访问内部(片上)/外部(板上)设备,或者软件加密设备。
实现依赖:独立于MCU。
其上层独立于MCU、ECU硬件和加密设备。
示例:AES原语在SHE中实现或者作为软件库提供给外部。


Services Layer
Crypto Services
加密服务主要包含三个模块:
- Crypto Service Manager:负责管理加密作业。
- Key Manager(密钥管理器):与密钥配置主服务器(在NVM或者加密驱动中)进行交互,并管理证书链的存储和验证。
- Intrusion Detection System Manager(入侵检测系统管理器):负责处理BSW模块或者SW-C报告的安全事务。
主要作用:以统一方式为应用软件提供加密原语、IDS服务和秘钥存储功能/服务;抽象硬件设备和属性。
实现依赖:独立于MCU和ECU硬件,高度可配置。
其上层独立于MCU和ECU硬件;根据AUTOSAR(AUTOSAR Interface)指定和实现。


Communication Services
General
通信服务是一组车载网络通信模块(CAN、LIN、FlexRay、Ethernet),通过Communication Hardware Abstraction与Communication Drivers相连。
主要作用:
- 为车载网络通信提供统一接口;
- 为网络管理提供统一服务;
- 为车载网络诊断通信提供统一接口;
- 为上层应用软件隐藏协议和报文属性。
实现依赖:独立于MCU和ECU硬件,但部分依赖于总线类型。
其上层独立于MCU、ECU硬件和总线类型。

服务类型:

Communication Stack - CAN
CAN Communication Services是一组为带CAN通信系统的车载网络通信提供的模块。
主要作用:为CAN网络提供统一接口;为上层应用软件隐藏协议和报文属性。
CAN Communication Stack支持:Classic CAN communication(CAN 2.0); CAN FD communication, if supported by hardware.
属性:
- 实现依赖:独立于MCU和ECU硬件,但部分依赖于CAN。
- 对于所有车载网络系统来说,AUTOSAR COM、通用NM(Network Management) 接口和Diagnostic Communication Manager是相同的;且对于每个ECU来说,他们作为一个实例。
- 通用NM接口只包含一个调度程序,没有更多的功能。对于网关ECU来说,它还可以包括NM协调器功能, 该协调器允许同步多个不同的网络,以同步唤醒或关闭他们。
- CAN NM是CAN网络专用的,且为每个CAN车载网络系统分别实例化。
- 通信系统特定的CAN State Manager处理与通信系统相关的启动和关闭功能。此外,它还控制着COM的不同选项来发送PDUs和监控信号超时。


Communication Stack Extension - TTCAN
TTCAN Communication Services是普通CAN接口和CAN驱动模块的可选扩展,用于带有通信系统TTCAN的车载网络通信。
主要作用:为TTCAN网络提供一个统一接口;为上层应用软件隐藏协议和报文属性。
注意:带TTCAN的CAN接口可以作为普通CAN和CAN Driver TTCAN。
属性:
TTCAN是CAN的一个绝对超集,即,一个支持TTCAN的CAN栈可以作为一个CAN和一个TTCAN总线。
CanIf和CanDrv是唯一需要扩展来服务TTCAN通信的模块。
通信栈CAN的属性也适用于带TTCAN功能的CAN。


Communication Stack Extension - J1939
J1939 Communication Services扩展了普通CAN通信栈,应用于重型汽车中的车载网络通信。
主要作用:提供J1939需要的协议服务;对不需要的应用程序隐藏了协议和报文属性。
注意:在CAN栈中有两个传输协议模块:Can Tp和J1939Tp,两者可在不同通道上交替或并行使用。用途分别为:
CanTp: ISO Diagnostics(DCM), large PDU transporton standard CAN bus;
J1939Tp: J1939 Diagnostics, large PDU transport onJ1939 driven CAN bus.
属性:
- 实现依赖:独立于MCU和ECU硬件,但基于CAN。
- 对于所有车载网络系统来说,AUTOSAR COM、通用NM(Network Management) 接口和Diagnostic Communication Manager是相同的;且对于每个ECU来说,他们作为一个实例。
- 支持在配置时使用未知的动态标志符。
- J1939网络管理处理每个ECU的唯一地址分配,但不支持休眠/唤醒处理和相关概念,比如部分网络(partial networking)。
- 提供J1939诊断和请求处理。


Communication Stack - LIN
LIN Communication Services 是一组为带通信系统LIN的车载网络提供的模块。
主要作用:为LIN网络提供统一接口;为上层应用软件隐藏协议和报文属性。
属性:
注意:


Communication Stack - FlexRay
FlexRay Communication Services是一组为带通信系统FlexRay的车载网络提供的模块。
主要作用:为FlexRay网络提供统一接口;为上层应用软件隐藏协议和报文属性。
属性:
注意:


Communication Stack - TCP/IP
TCP/IP Communication Services是一组为带通信系统TCP/IP的车载网络通信提供的模块。
主要作用:为TCP/IP网络提供统一接口;为上层应用软件隐藏协议和报文属性。
属性:
- TcpIp模块实现了TCP/IP协议族的主要协议(TCP、UDP、IPv4、IPv6、ARP、ICMP、DHCP),并通过以太网提供了动态、基于socket的通信;
- Socket Adaptor module(SoAd)是TcpIp模块的单独的上层模块。


Communication Stack - General
Off-board Communication Stack - Vehicle-2-X
Memory Services
Memory Services由一个模块组成:NVRAM Manager,负责非易失性数据的管理(读写不同的存储设备)。
主要作用:
- 以一个统一的方式为应用软件提供非易失性数据;
- 抽象出存储器地址和其属性;
- 为非易失性数据提供机制,比如:保存、加载、检验保护、验证、可靠存储等。
实现依赖:独立于MCU和ECU硬件;高度可配置性。
其上层独立于MCU和ECU硬件,根据AUTOSAR(AUTOSAR interface)指定和实现。


System Services
System Services是一组可以被所有层的模块使用的函数和模块。比如:实时操作系统(OS包含timer services)、Error Manager等待。
一些系统服务依赖于MCU(比如:OS),且可能支持特殊的MCU功能(比如:时间服务),此外也部分依赖于ECU硬件和应用软件。但是,有些系统服务也会独立于硬件和MCU。
主要作用:为应用软件和BSW提供基础服务。
实现依赖:部分依赖于MCU、ECU硬件和应用软件。
其上层接口独立于MCU和ECU硬件。


Error Handling, Reporting and Diagnostic
在AUTOSAR中有用于错误处理的不同方面的专用模块。比如:
- Diagnostic Event Manager(DEM)负责处理和保存诊断事件(错误)和相关的冻结帧数据。
- Diagnostic Log and Trace 模块支持应用软件的logging和tracing。它收集用户定义的日志信息,并将其转换为一种标准化的格式。
- 在基础软件中检测到的所有开发错误都会报告给Default Error Trace(DET)。
- Diagnostic Communication Manager 为诊断服务提供了一个通用的API。
- etc.


Application Layer: Sensor/Actuator Software Component
Sensor/Actuator AUTOSAR Software Component是一个用于传感器检测和执行器控制的特定类型的AUTOSAR软件组件。尽管它不属于AUTOSAR BSW,但其和本地信号的关系紧密。出于集成原因(标准化接口实现和接口描述),已决定将Sensor/Actuator SW Components定位在RTE之上。由于它们与原始局部信号的强相互作用关系,重定位受到限制。
主要作用:抽象连接到ECU的硬件传感器和执行器的特定物理属性。
实现依赖:独立于MCU和ECU硬件,但依赖于传感器和执行器。


