移动机器人领域相关C++库的综述
C++开源库的介绍,包括Eigen, Sophus, NLopt, OOQP, Mosek, OSQP, OpenCV,Ipopt, GLPK, OMPL, SBPL, MoveIt,Ceres, g2o, PCL.
Ceres和g2o(General Graphic Optimization)作为SLAM常用的两个优化库。
一. Eigen
处理矩阵,向量,数值分析等线性代数的C++库.

二. Sophus
Sophus是关于李群李代数相关的C++库,在Eigen基础上开发,支持SO(3),SE(3),SO(2),SE(2),以及相似变换Sim(3).
群:群(Group)是一种集合加上一种运算的代数结构,以A表示集合,“·”表示运算,则群一般写作 G(A, ·),满足四个性质:凤(封闭性)姐(结合性)咬(幺元性)你(可逆性)
李群李代数:李群是指拥有(连续)光滑性质的群,常用的也就是旋转矩阵群,变换矩阵群(旋转+平移).
表达旋转的方式有旋转向量,旋转矩阵,四元数,欧拉角等方式,但关于为什么还要采用李群李代数表达机器人旋转,这篇博客写的比较好https://blog.csdn.net/qq_45010210/article/details/126692609,简言之就是,在估计机器人位姿时需要对表示旋转的量求导,变换矩阵不满足加法封闭性,变换矩阵加变换矩阵不等于变换矩阵,而李群可以作对数映射转化为李代数,就是三维向量,满足加法封闭,便于求导。

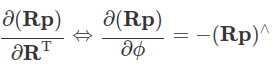
假设我们对空间一点p进行旋转,得到Rp,现在我们要计算旋转之后的点关于旋转矩阵的导数:

由于R不满足加法,所以转换成李代数进行求导:
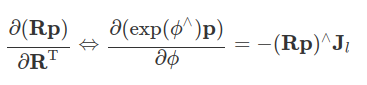
上式的结果用BCH近似得到,由于Jl的存在,增加计算的复杂度,所以可以使用扰动模型(左乘)来进行简化。左扰动模型的结果为:
李群BCH公式:
1. 安装:
git clone https://github.com/strasdat/Sophus.git cd Sophus git checkout a621ff mkdir build cd build cmake .. make sudo make install
如果make时提示错误
Sophus/sophus/so2.cpp:33:26:error: lvalue required as left operand of assignment
unit_complex_.real() = 1.;
改为unit_complex_.real(1.);
安装完成

2. 使用
SO(3),SE(3),so(3),se(3)的相互转换关系

CMakeLists.txt文件如下:
cmake_minimum_required(VERSION 3.10) project(test) find_package(Sophus REQUIRED) find_package(Eigen3 REQUIRED) include_directories(include ${Sophus_INCLUDE_DIRS} ${EIGEN3_INCLUDE_DIR}) add_executable(test test.cpp) target_link_libraries(test ${Sophus_LIBRARIES} ${EIGEN3_LIBRARIES})
头文件:
#include<Eigen/Core> #include<sophus/so3.h> #include<sophus/se3.h>
常用函数:Sophus::SO3::exp(V1);SO3_V1.log();Sophus::SO3::hat(so3_V1);Sophus::SO3::vee(M_so3_V1);
用的时候可以查阅:https://blog.csdn.net/u011092188/article/details/77833022
三. NLopt
开源的非线性优化库,官网:https://nlopt.readthedocs.io/en/latest/
1. 安装:
下载完,
cd nlopt-2.7.1
mkdir build
cmake ..
make
sudo make install
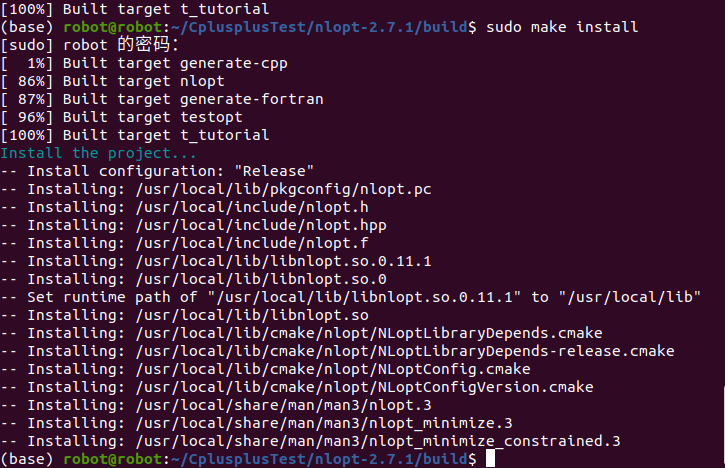
2. 使用
相比官方教程,需要在CMaikeists.txt中增加 set(NLopt_LIBRARIES /usr/local/lib/libnlopt.so.0.11.1 )
否则会报下面的错:
/usr/bin/ld: CMakeFiles/test.dir/test.cpp.o: in function `main': test.cpp:(.text+0x2be): undefined reference to `nlopt_create' /usr/bin/ld: test.cpp:(.text+0x2d5): undefined reference to `nlopt_set_lower_bounds' /usr/bin/ld: test.cpp:(.text+0x2ed): undefined reference to `nlopt_set_min_objective' /usr/bin/ld: test.cpp:(.text+0x30e): undefined reference to `nlopt_add_inequality_constraint' /usr/bin/ld: test.cpp:(.text+0x32f): undefined reference to `nlopt_add_equality_constraint' /usr/bin/ld: test.cpp:(.text+0x344): undefined reference to `nlopt_set_xtol_rel' /usr/bin/ld: test.cpp:(.text+0x35b): undefined reference to `nlopt_optimize' /usr/bin/ld: test.cpp:(.text+0x39c): undefined reference to `nlopt_destroy' collect2: error: ld returned 1 exit status make[2]: *** [CMakeFiles/test.dir/build.make:103:test] 错误 1 make[1]: *** [CMakeFiles/Makefile2:76:CMakeFiles/test.dir/all] 错误 2 make: *** [Makefile:84:all] 错误 2
CMakeLists.txt如下:
cmake_minimum_required(VERSION 3.10) project(test) find_package(NLopt REQUIRED) set(NLopt_LIBRARIES /usr/local/lib/libnlopt.so.0.11.1 ) //动态连接库位置需要指定,否则容易报错;也可以是libnlopt.so.0,具体按照自己安装的版本 include_directories(include ${NLopt_INCLUDE_DIRS}) add_executable(test test.cpp) target_link_libraries(test ${NLopt_LIBRARIES} )
2.1案例



代码结构:
ls文件夹:
build CMakeLists.txt include(/test.h) test.cpp
CMakeLists.txt 已经给出,test.cpp如下:
#pragma once #include"test.h"
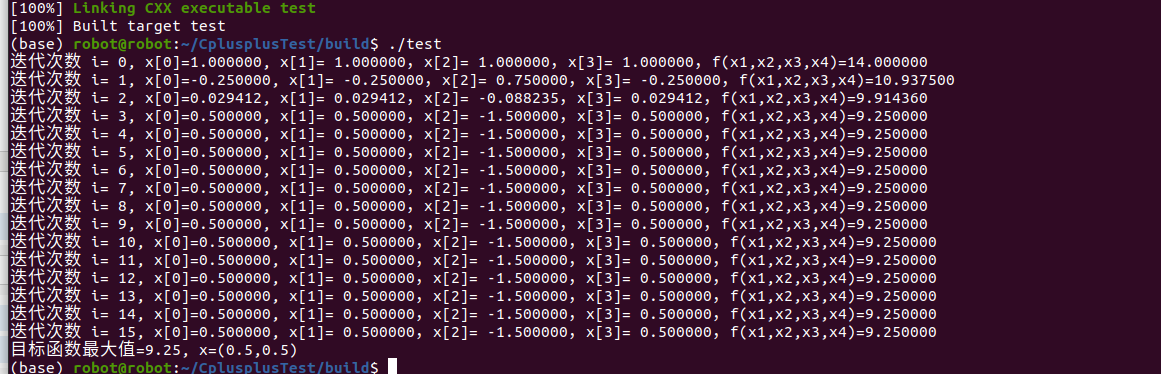
using namespace std; using namespace nlopt; /* * main.c * * Created on: Oct 9, 2018 * Author: lgh */ #define INF (1.0/0.0) int i=0; //目标函数; double utility(unsigned n, const double *x, double *grad, void *data) { if(grad){ grad[0]=2*x[0]; grad[1]=2*x[1]; grad[2]=1.0; grad[3]=2*x[3]; } printf("迭代次数 i= %d, x[0]=%f, x[1]= %f,x[2]= %f,x[3]= %f,f(x1,x2,x3,x4)=%f\n",i++,x[0],x[1],x[2],x[3],x[0]*x[0]+x[1]*x[1]+x[2]+x[3]*x[3]+10); return ( x[0]*x[0]+x[1]*x[1]+x[2]+x[3]*x[3]+10 ); } //等式限制条件; double constraint(unsigned n, const double *x, double *grad, void *data) { if(grad){ grad[0]= 1.0; grad[1]= 1.0; grad[2]= 1.0; grad[3]= 1.0; } return (x[0]+x[1]+x[2]+x[3]); } //不等式限制条件; double inconstraint(unsigned n, const double *x, double *grad, void *data) { if(grad){ grad[0]= -2*x[0]; grad[1]= -2*x[1]; } return (-x[0]*x[0]-x[1]*x[1]-100); } int main(int argc, char const *argv[]) { double tol=1e-8; double lb[4]={-INF,-INF,-INF,-INF}; //x1、x2的下边界; double ub[4]={INF,INF,INF,INF}; double x[4]={1, 1, 1, 1}; //给x1、x2赋予初始值; double f_max; nlopt_opt opter=nlopt_create( NLOPT_LD_SLSQP, 4); //设置自变量下限; nlopt_set_lower_bounds(opter, lb); // 目标函数; nlopt_set_min_objective(opter, utility, NULL); // 不等式约束; nlopt_add_inequality_constraint(opter, inconstraint, NULL, tol); // 等式约束; nlopt_add_equality_constraint(opter, constraint, NULL, tol); // 停止时需要的条件; nlopt_set_xtol_rel(opter, tol); // 开始优化; nlopt_result result=nlopt_optimize(opter, x, &f_max); if (result) { printf("目标函数最大值=%g, x=(%g,%g)\n", f_max, x[0], x[1], x[2], x[3]); } //free nlopt_destroy(opter); return 0; }
test.h如下:
#pragma once #include<iostream>
#include <vector> #include <string>#include <iomanip> #include <nlopt.hpp>
#include <stdio.h> #include <math.h>
运行结果:
运动规划案例:https://github.com/HKUST-Aerial-Robotics/grad_traj_optimization
求解器类型:
GN_DIRECT = 0, GN_DIRECT_L, GN_DIRECT_L_RAND, GN_DIRECT_NOSCAL, GN_DIRECT_L_NOSCAL, GN_DIRECT_L_RAND_NOSCAL, GN_ORIG_DIRECT, GN_ORIG_DIRECT_L, GD_STOGO, GD_STOGO_RAND,
LD_LBFGS_NOCEDAL, LD_LBFGS, LN_PRAXIS, LD_VAR1, LD_VAR2, LD_TNEWTON, LD_TNEWTON_RESTART, LD_TNEWTON_PRECOND, LD_TNEWTON_PRECOND_RESTART,
GN_CRS2_LM, GN_MLSL, GD_MLSL, GN_MLSL_LDS, GD_MLSL_LDS,
LD_MMA, LN_COBYLA, LN_NEWUOA, LN_NEWUOA_BOUND, LN_NELDERMEAD, LN_SBPLX, LN_AUGLAG,
LD_AUGLAG, LN_AUGLAG_EQ, LD_AUGLAG_EQ, LN_BOBYQA, GN_ISRES, AUGLAG, AUGLAG_EQ, G_MLSL, G_MLSL_LDS, LD_SLSQP, LD_CCSAQ, GN_ESCH,
G/L代表的就是 全局(global)或者局部(local)优化,N/D代表的就是 不需导数 或者 需要导数 的优化.
例如 LN_COBYLA 就是用的 COBYLA 算法 ,然后该算法用于局部(L)无需导数(N)的优化
四. OOQP
OOQP是一个基于原对偶内点方法的面向对象C++程序包,用于求解凸二次规划问题.
1. 安装:
OOQP的安装之前需要安装完成BLAS和MA27/MA57
BLAS安装命令:
sudo apt-get install libblas-dev
安装位置:
/usr/lib/x86_64-linux-gnu/libblas.so /usr/lib/x86_64-linux-gnu/libblas.a
MA27/MA57安装:
2. 使用
五. Mosek
MOSEK是一款数学优化求解器,也是公认的求解二次规划、二阶锥规划和半正定规划问题最快的求解器之一.
六. OSQP
OSQP求解形式如下的凸二次规划问题.
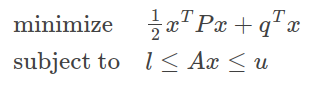
目标函数是二次的,约束是线性的.
1. 安装:
安装 qsqp-eigen
cmeke ..
make
sudo make install
2. 使用:
https://zhuanlan.zhihu.com/p/376122376
(1)创建求解器Solver的实例
OsqpEigen::Solver solver;
(2)设置Setting参数
(3)设置Data参数
(4)初始化求解器Solver
(5)求解优化问题
(6)提取最优解
七. OpenCV

 浙公网安备 33010602011771号
浙公网安备 33010602011771号