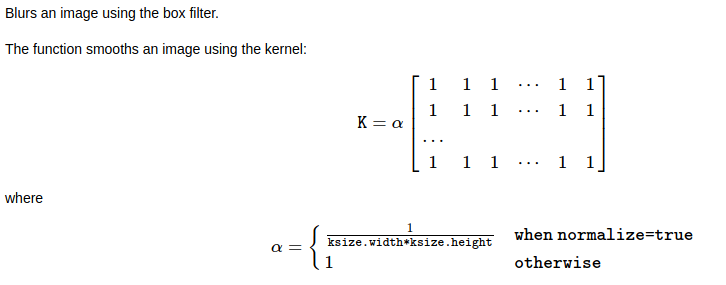
方框滤波
void cv::boxFilter ( InputArray src,
OutputArray dst,
int ddepth,
Size ksize,
Point anchor = Point(-1,-1),
bool normalize = true,
int borderType = BORDER_DEFAULT
)
Python:
dst = cv.boxFilter( src, ddepth, ksize[, dst[, anchor[, normalize[, borderType]]]] )
Parameters
-
src input image. dst output image of the same size and type as src. ddepth the output image depth (-1 to use src.depth()). ksize blurring kernel size. anchor anchor point; default value Point(-1,-1) means that the anchor is at the kernel center. normalize flag, specifying whether the kernel is normalized by its area or not. borderType border mode used to extrapolate pixels outside of the image, see BorderTypes. BORDER_WRAP is not supported.
参考链接:https://docs.opencv.org/master/d4/d86/group__imgproc__filter.html#gad533230ebf2d42509547d514f7d3fbc3

 浙公网安备 33010602011771号
浙公网安备 33010602011771号