WCH TMOS用法详解
WCH TMOS详解
1.概述
蓝牙为了实现同多个设备相连,实现多功能和多任务,产生了调度问题。虽然软件和协议栈可扩充,但终究最底层的执行部门只有一个。为了实现多事件和多任务切换,需要把事件和任务对应,针对这种应用起了一个TMOS名字操作系统抽象层。
TMOS作为调度核心,BLE协议栈、profile定义、所有的应用都围绕它来实现。TMOS不是传统大家使用的操作系统,而是一个允许软件建立和执行事件的循环。
多任务管理方式实际上只有一个任务在运行,但是可以使用任务调度的策略将多个任务进行调度,每个任务占用一定的时间(独占式,执行完当前任务退出,继续查询其他可执行任务),所有的任务通过时间分片的方式处理。
TMOS 系统时钟单位为 625us,以 RTC 为基准得到所有需要系统的时间。
软件功能是由任务事件来实现的,创建一个任务事件需要以下工作:
- 创建task identifier任务ID;
例如:


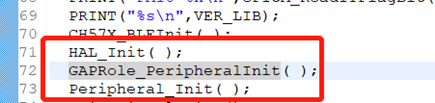
2.编写任务初始化(task initialization routine)进程,并需要添加到TMOS初始化进程中,这就是说系统启动后不能动态添加功能(新的Task ID);
3.编写任务处理程序;

4.定义任务事件,编写用户功能代码。
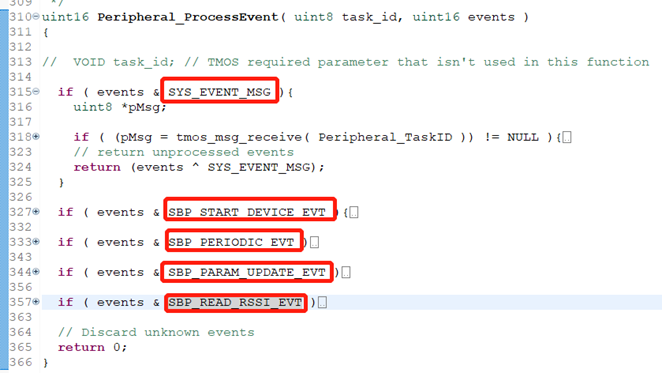
事件名按位定义,每一层taskID最多包含1个消息事件和15个任务事件(共16位)
列如:
按位定义EVT任务事件,如下图:

任务事件的启动有2种方式:(任务启动后只执行1次,如果重复执行,需要再重新开启任务)
1) 立即启动任务,调用后event时间立即执行
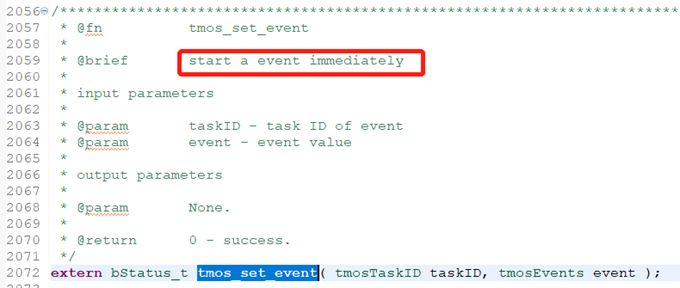
比如:

2) 设定延迟启动1个任务,从设定完成后开始计时
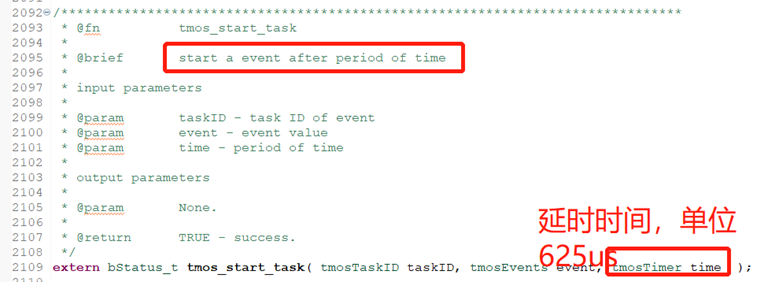
比如:Peripheral_TaskID功能下的自定义的SBP_PERIODIC_EVT任务,延迟(SBP_READ_RSSI_EVT_PERIOD*625)us后运行

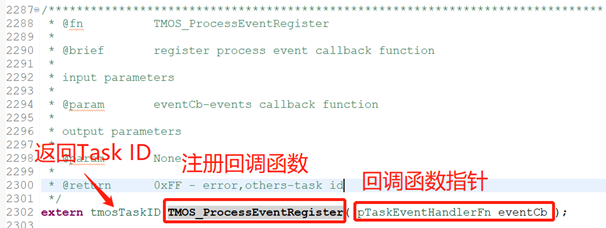
用户代码功能,前面有讲生成TaskID的时候需要向Tmos注册EVT处理函数指针,EVT执行条件满足后,Tmos就会自动调用该函数,如下图所示:
externbStatus_ttmos_stop_task( tmosTaskIDtaskID, tmosEvents event );
此函数将停止一个会在taskID层生效的,名为event的任务,调用此函数后,该事件任务将不会生效。
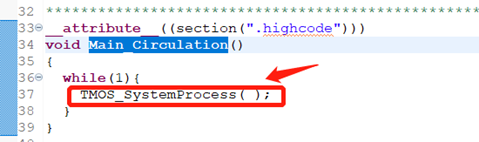
5.主循环不停调用TMOS_SystemProcess,查询可执行event事件;如果开始HAL_SLEEP,芯片开启低功耗睡眠模式,Tmos会开启RTC唤醒功能,事件被执行前会自动唤醒,运行事件代码。
任务调度函数使用注意事项:
1、 禁止在中断中调用
2、 建议不要在单个任务中执行超过连接间隔一半时长的任务,否则将影响蓝牙通讯
3、 同理,在中断中建议不要执行超过连接间隔一半时长的任务,否则将影响蓝牙通讯
4、 在事件生效执行的代码中调用延时执行函数时,延时时间以当前事件生效时间点为基准偏移,所以对调用延时执行函数在生效执行的代码中摆放的位置没有要求。
5、 任务存在优先级,根据在xxx_ProcessEvent函数中判断的先后顺序决定,同时生效的任务,先执行先判断,后执行后判断。注意,执行完先判断的事件任务后,要等到任务调度系统轮巡一遍后,才会执行后判断的事件任务。
6、 事件名按位定义,每一层taskID最多包含1个消息事件和15个任务事件(共16位)
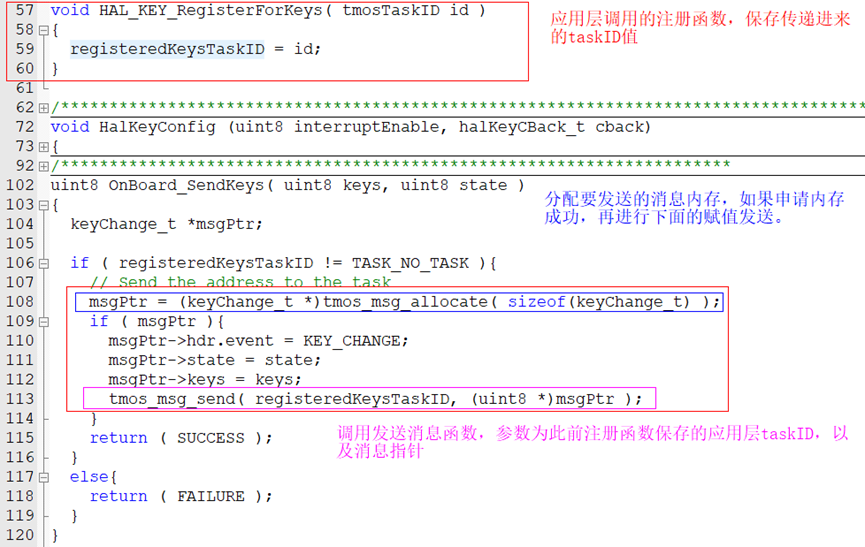
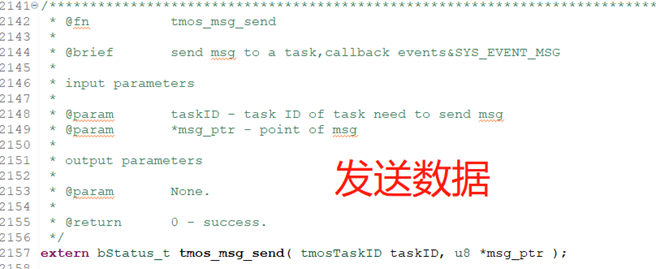
前面讲了1个Task ID的应用情况,为了降低C文件或者功能之间的耦合,一般比较好的做法是把同功能或者相近的event放到同一个Task ID下,这样就产生了1个问题,不同的Task ID可能会有数据需要交互,Tmos提供了不同Task ID之间进行数据交互的函数。
比如:外设里面拿其中两个Task ID 举例子halTaskID和Peripheral_TaskID,假设这两个Task之间要进行数据交互。


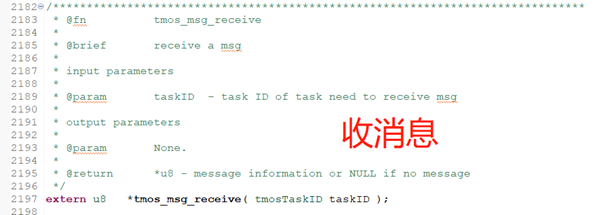
之前有讲每个Task ID都有1个消息event
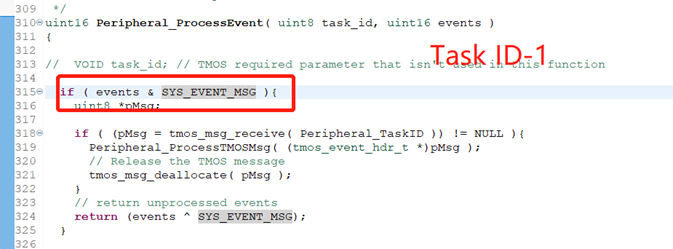
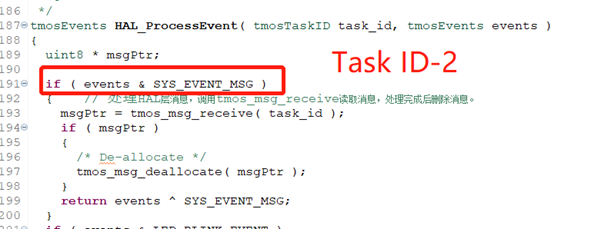
上图演示的是接收消息,接收主要用到2个函数

 浙公网安备 33010602011771号
浙公网安备 33010602011771号