
(原)Show, Attend and Translate: Unsupervised Image Translation with Self-Regularization and Attention
转载请注明出处:
https://www.cnblogs.com/darkknightzh/p/9333844.html
论文网址:https://arxiv.org/abs/1806.06195
在gan中,对图像进行风格变换时,一般都是将整个图像进行变换。由于图像包含前景和背景,因而该论文在保持背景区域不变的前提下,对前景区域进行风格变换。同时,使用self-regularization项来约束变换前后背景区域的差异。
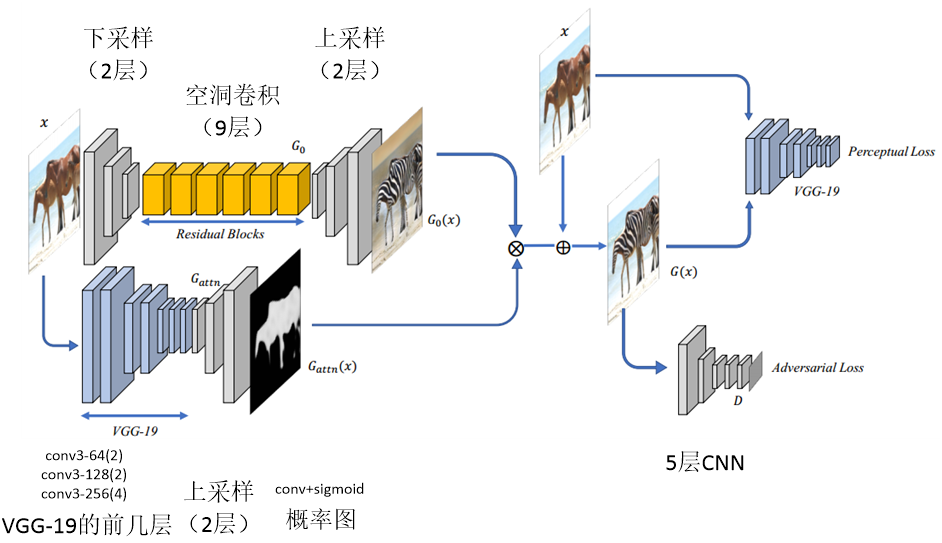
网络结构如下图所示。输入图像通过2层的下采样,而后通过9层的残差网络,在通过2层的上采样,得到。另一方面,通过预训练的vgg-19网络的前几层,并通过2层的上采样,在通过conv+sigmoid,得到Gattn,即前景区域的概率图。网络基本结构均为conv+bn+relu。残差部分使用空洞卷积,因为空洞卷积可以增加感受野的大小。损失函数包含两部分,传统的判别器的损失及感知损失。文中指出,感知损失比传统的距离更接近人类对相似性的认知。传统的判别网络为5层的CNN网络。
其中,
$G(x)={{G}_{attn}}(x)\otimes {{G}_{0}}(x)+(1-{{G}_{attn}}(x))\otimes x$
${{G}_{attn}}(x)\otimes {{G}_{0}}(x)$代表前景区域,$(1-{{G}_{attn}}(x))\otimes x$代表背景区域。${{G}_{attn}}(x)$为前景区域的概率图,像素范围为[0, 1]。
文中判别器:
${{L}_{D}}=\log (D(y))-\log (1-D(G(x)))$
生成器:
${{L}_{G}}={{l}_{adv}}(G(x),y)+\lambda {{l}_{reg}}(x,G(x))$
生成器包含两部分,传统gan的损失:
${{l}_{adv}}(G(x),y)=-\log (-D(G(x)))$
及self-regularization项损失:
${{l}_{reg}}(G(x),x)=\sum\limits_{l=1,2,3}{\frac{1}{{{H}_{l}}{{W}_{l}}}\sum\limits_{h,w}{(\left\| {{w}_{l}}\circ (\hat{F}(x)_{hw}^{l}-\hat{F}(G(x))_{hw}^{l}) \right\|_{2}^{2})}}$
${{l}_{reg}}$使用预训练的vgg-19网络的前三层加权得到。分别将输入图像x及生成的图像$G(x)$通过vgg-19网络前3层,得到对应的特征图,并计算特征图的l2 norm的平方,之后进行加权。各层权重经过大量实验得到为:
$({{w}_{1}},{{w}_{2}},{{w}_{3}})=(1/32,1/16,1/8)$
训练过程:先训练${{G}_{0}}$,再训练${{G}_{attn}}$,最后finetune整个网络。对于$\lambda $,从0增加,直至对抗损失降低到阈值$l_{adv}^{t}$之下,而后固定$\lambda $。
posted on 2018-07-19 08:51 darkknightzh 阅读(817) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号