用AI为工业装上“智能眼”:图像识别与实时视频流的融合实践
一、引言:工业自动化的“智能眼睛”
随着智能制造、工业4.0的持续推进,计算机视觉逐渐取代人眼,成为工业自动化场景中不可替代的“感知系统”。
从生产线上的缺陷检测,到仓储机器人中的定位与导航,再到高危场所的远程识别与告警,图像识别技术已经从实验室走向生产线核心。
但现实问题是,工业视觉系统在部署时往往面临三大难点:
-
📡 视频源复杂:设备支持 RTSP/RTMP/USB 不一,接入不统一;
-
⏱ 实时要求高:必须边播边识别,毫秒级延迟控制;
-
🧠 AI模型计算重:嵌入式、ARM端资源有限,难以大模型推理。
如何在“稳定接入工业视频流”的基础上,高效对接图像识别模型,成为构建智能工业视觉系统的关键一环。
二、整体方案设计:视频输入 × 机器学习模型融合
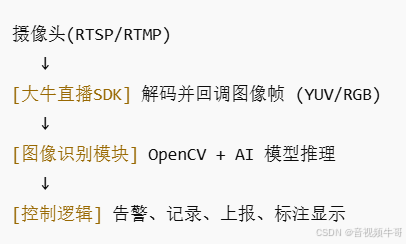
本方案采用如下架构组合:
-
🎬 大牛直播SDK:负责 RTSP/RTMP 摄像头流的实时接入与解码;
-
🧠 OpenCV + AI 模型(如 ONNXRuntime):进行图像识别任务;
-
⚙️ 业务处理模块:如结果上报、告警触发、界面显示、PLC对接等。
数据链路流程如下:
三、基于大牛直播SDK的视频接入与回调实现
✅ Step 1:接入 RTSP/RTMP 工业摄像头
通过大牛直播SDK提供的接口,一行代码即可接入 RTSP/RTMP 视频流:
/*
* SmartPlayer.java
* Created by daniusdk.com
* WeChat: xinsheng120
*/
private void InitAndSetConfig() {
openPlayer();
if (playerHandle == 0) {
Log.e(TAG, "playerHandle 创建失败");
return;
}
configurePlayerOptions();
setPlaybackUrl();
}
private void openPlayer() {
playerHandle = libPlayer.SmartPlayerOpen(myContext);
if (playerHandle != 0) {
libPlayer.SetSmartPlayerEventCallbackV2(playerHandle, new EventHandlerV2Impl(handler, this));
}
}
private void configurePlayerOptions() {
libPlayer.SmartPlayerSetBuffer(playerHandle, playBuffer);
//设置实时回调下载速度
libPlayer.SmartPlayerSetReportDownloadSpeed(playerHandle, 1, 2);
libPlayer.SmartPlayerSetFastStartup(playerHandle, isFastStartup ? 1 : 0);
libPlayer.SmartPlayerSaveImageFlag(playerHandle, 1);
int is_using_tcp = 1; //设置RTSP TCP/UDP模式(默认UDP模式)
libPlayer.SmartPlayerSetRTSPTcpMode(playerHandle, is_using_tcp);
int rtsp_timeout = 10; //设置RTSP超时时间, timeout单位为秒,必须大于0
libPlayer.SmartPlayerSetRTSPTimeout(playerHandle, rtsp_timeout);
libPlayer.SmartPlayerSetRTSPAutoSwitchTcpUdp(playerHandle, 1);
}
private void setPlaybackUrl() {
//playbackUrl = "rtmp://192.168.0.101:1935/hls/stream1";
//playbackUrl = "rtsp://192.168.1.4:18554/stream1";
Log.i(TAG, "setPlaybackUrl: " + playbackUrl);
if (playbackUrl == null || playbackUrl.isEmpty()) {
Log.e(TAG, "playbackUrl is NULL");
return;
}
libPlayer.SmartPlayerSetUrl(playerHandle, playbackUrl);
}
支持工业设备中常见的:
-
RTSP拉流(安防摄像头)
-
RTMP推流(边缘设备、编码器)
-
本地文件/USB摄像头等拓展
✅ Step 2:开启 YUV 或 RGB 图像帧回调
在播放过程中,启用帧数据回调,将视频帧送入图像识别模块,以回调RGB数据为例:
private static class RGBAExternalRender implements NTExternalRender {
// public static final int NT_FRAME_FORMAT_RGBA = 1;
// public static final int NT_FRAME_FORMAT_ABGR = 2;
// public static final int NT_FRAME_FORMAT_I420 = 3;
private final String image_path_;
private long last_save_image_time_ms_;
private int width_;
private int height_;
private int row_bytes_;
private ByteBuffer rgba_buffer_;
public RGBAExternalRender(String image_path) {
this.image_path_ = image_path;
}
@Override
public int getNTFrameFormat() {
Log.i(TAG, "RGBAExternalRender::getNTFrameFormat return " + NT_FRAME_FORMAT_RGBA);
return NT_FRAME_FORMAT_RGBA;
}
@Override
public void onNTFrameSizeChanged(int width, int height) {
width_ = width;
height_ = height;
row_bytes_ = width_ * 4;
rgba_buffer_ = ByteBuffer.allocateDirect(row_bytes_ * height_);
Log.i(TAG, "RGBAExternalRender::onNTFrameSizeChanged width_:" + width_ + " height_:" + height_);
}
@Override
public ByteBuffer getNTPlaneByteBuffer(int index) {
if (index == 0)
return rgba_buffer_;
Log.e(TAG, "RGBAExternalRender::getNTPlaneByteBuffer index error:" + index);
return null;
}
@Override
public int getNTPlanePerRowBytes(int index) {
if (index == 0)
return row_bytes_;
Log.e(TAG, "RGBAExternalRender::getNTPlanePerRowBytes index error:" + index);
return 0;
}
public void onNTRenderFrame(int width, int height, long timestamp) {
if (rgba_buffer_ == null)
return;
rgba_buffer_.rewind();
// copy buffer
// test
// byte[] test_buffer = new byte[16];
// rgba_buffer_.get(test_buffer);
Log.i(TAG, "RGBAExternalRender:onNTRenderFrame " + width + "*" + height + ", t:" + timestamp);
// Log.i(TAG, "RGBAExternalRender:onNTRenderFrame rgba:" +
// bytesToHexString(test_buffer));
}
}四、图像识别模块:AI模型 + OpenCV 工业场景实战
🔍 常见识别任务:
| 场景 | 目标 |
|---|---|
| 生产质检 | 裂痕识别、缺件检测 |
| 工厂监控 | 人员识别、工服识别 |
| 工业装配 | 零件识别、条码识别 |
| 危险区域 | 区域入侵检测、姿态识别 |
🤖 示例:ONNX格式模型的推理处理流程
伪代码如下:
public void process(Mat frame, long timestamp) {
// 前处理:尺寸、归一化、通道变换
Mat resized = new Mat();
Imgproc.resize(frame, resized, new Size(224, 224));
resized.convertTo(resized, CvType.CV_32F, 1.0 / 255);
// 模型推理(ONNXRuntime、NCNN等)
float[] inputData = matToCHW(resized);
float[] output = aiModel.run(inputData);
// 后处理:结果解码 + 可视化
List<Rect> results = decodeBoxes(output);
for (Rect r : results) {
Imgproc.rectangle(frame, r.tl(), r.br(), new Scalar(0, 255, 0), 2);
}
// 可视化/输出
renderer.drawFrame(frame);
}
五、边缘部署优化建议
-
🧩 帧率控制:可选每秒处理2~5帧即可满足大多数识别任务;
-
💡 轻量模型:推荐使用 MobileNet、YOLOv8-n、ResNet18 等结构;
-
⚙️ 异步线程处理:回调中不要阻塞,图像处理用独立线程池;
-
🔄 模型热切换:不同工位/任务可支持动态替换推理模型;
-
📤 识别结果回传:MQTT、Modbus、TCP 上报识别结果/坐标/截图;
六、典型应用案例
✅ 工业质检
-
相机通过 RTSP 推流检测产品表面;
-
OpenCV识别裂纹、划痕、偏位;
-
异常帧保存为图片并上报服务器。
✅ 智能安全生产
-
工厂内 RTMP 视频流实时分析;
-
检测是否佩戴安全帽、是否误入危险区域;
-
未合规人员触发声光报警。
✅ 自动分拣系统
-
机械臂前端通过摄像头识别零件类型;
-
用 AI 模型判断形状、标签、颜色;
-
识别后控制下游执行动作。
七、总结:AI识别从不只是模型,更是系统
在工业自动化落地过程中,图像识别的价值不在于“看得见”,而在于“看得准 + 反应快 + 接得上”。
大牛直播SDK 提供稳定、标准化的视频流输入接口,
OpenCV 提供灵活而强大的图像处理能力,
AI 模型提供智能识别大脑,
三者融合构建起一套真正可部署、可扩展、可维护的智能视觉系统。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号