 输入捕获
输入捕获
输入捕获(通用定时器和高级定时器)
当通道输入引脚出现指定电平跳变时,当前CNT的值被锁存到CCR寄存器,用于测量PWM波形的频率、占空比、脉冲间隔和电平持续时间。

频率测量方法:
测频法(直接法,适合高频信号):单位时间T内的上升沿次数 频率 f = N/T
测周法(间接法,适合低频信号):在两个上升沿内,测量标准频率信号f c的上升沿次数N
f = 1/T fc = N/T -------> fc = f×N ---------> f = fc/N

线路1:
三输入异或门 | CH1信号------>输入滤波器------>边沿检测器------->TI1FP1----->输入捕获通道1
----->预分频器----->触发信号----->CNT寄存器值转运至CCR寄存器,在状态寄存器置标志位,产生捕获中断
线路2:
三输入异或门 | CH1信号------>输入滤波器------>边沿检测器------->TI1FP2----->输入捕获通道2
----->预分频器----->触发信号----->CNT寄存器值转运至CCR寄存器,在状态寄存器置标志位,产生捕获中断
主从触发模式 (输入比较只能在通道1和通道2)

主模式:将定时器内部信号------>TRGO引脚-------->触发别的外设
从模式:接收其他外设或者自身外设的信号,控制自身定时器的运行


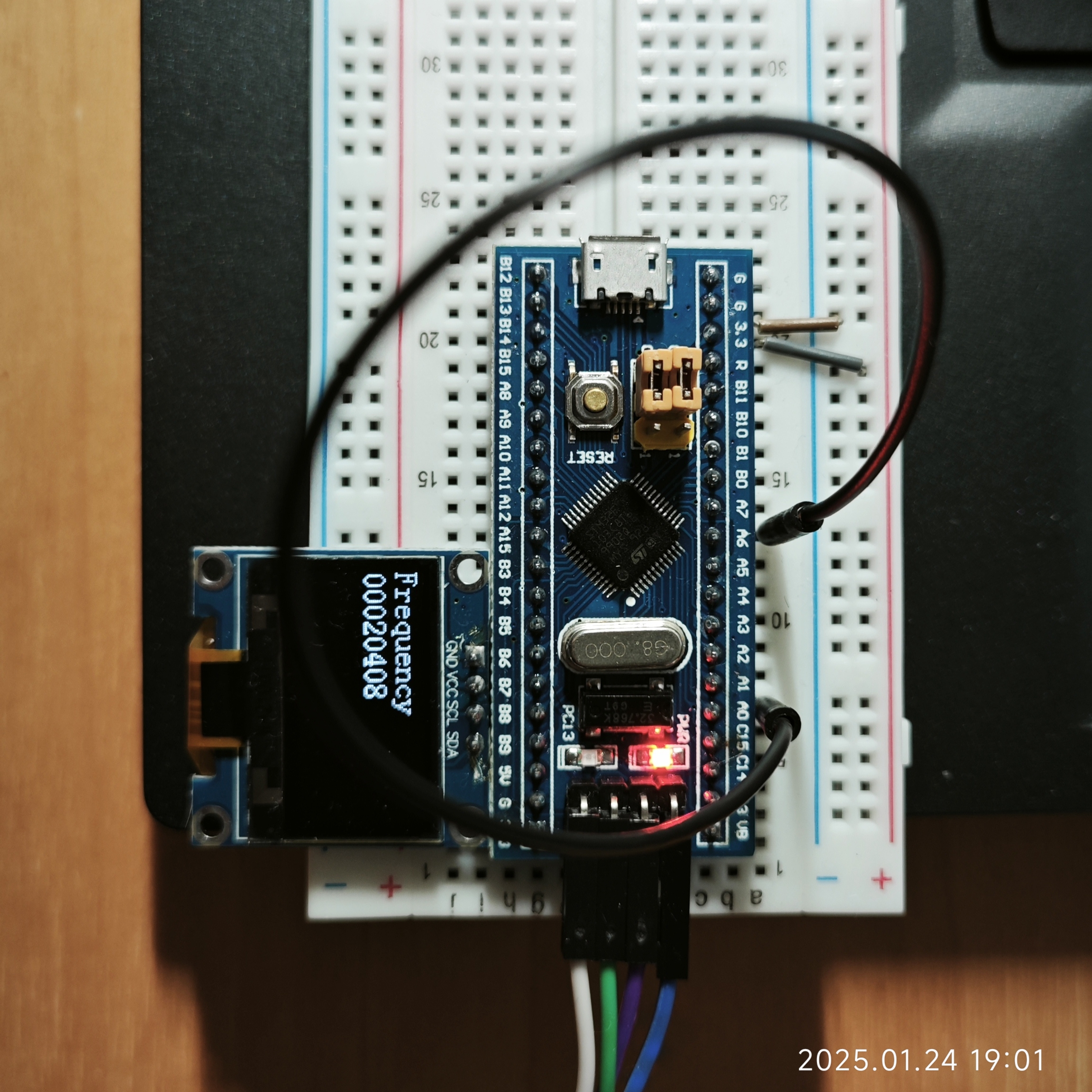
输入捕获测量频率(测量PA0口输出的PWM信号频率)
输入捕获单元IC.c
#include "stm32f10x.h"
#define IC_ARR (65536-1) /* PWM的分辨率 = 1 / ARR+1 */
#define IC_PSC (72-1) /* PWM的频率 f = CK_PSC / (PSC+1)(ARR+1) */
void IC_Init(void)
{
/* 1.RCC开启时钟 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* 2.GPIO初始化 */
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 引脚:模式通用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; // 要初始化的引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输出速度
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 3.配置时基单元 */
TIM_InternalClockConfig(TIM3); //选择内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInitStruct.TIM_Period = IC_ARR;
TIM_TimeBaseInitStruct.TIM_Prescaler = IC_PSC;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
/* 4.配置输入捕获单元 */
TIM_ICInitTypeDef TIM_ICInitStruct;
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICFilter = 0xF;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; //直连通道
TIM_ICInit(TIM3, &TIM_ICInitStruct);
/* 5.选择从模式触发源 */
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);
/* 6.选择触发操作 */
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
/* 7.开启定时器 */
TIM_Cmd(TIM3, ENABLE);
}
uint16_t IC_GetFrequency(void)
{
return 1000000 / TIM_GetCapture1(TIM3);
}主函数main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
#include "IC.h"
uint8_t i;
int main(void)
{
OLED_Init();
PWM_Init();
IC_Init();
OLED_ShowString(1, 1, "Frequency");
while (1)
{
/* PWM的占空比 = CCR / ARR+1 */
PWM_SetCompare1(50); //设置CCR
OLED_ShowNum(2, 1, IC_GetFrequency(), 8);
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号