Arm Linux系统调用流程详细解析
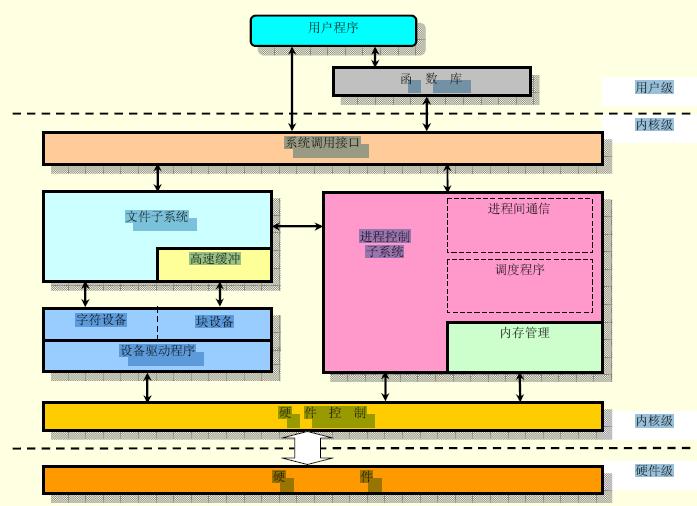
Linux系统通过向内核发出系统调用(system call)实现了用户态进程和硬件设备之间的大部分接口。
系统调用是操作系统提供的服务,用户程序通过各种系统调用,来引用内核提供的各种服务,系统调用的执行让用户程序陷入内核,该陷入动作由swi软中断完成。
1、用户可以通过两种方式使用系统调用:
第一种方式是通过C库函数,包括系统调用在C库中的封装函数和其他普通函数。
第二种方式是使用_syscall宏。2.6.18版本之前的内核,在include/asm-i386/unistd.h文件中定义有7个_syscall宏,分别是:
_syscall0(type,name)
_syscall1(type,name,type1,arg1)
_syscall2(type,name,type1,arg1,type2,arg2)
_syscall3(type,name,type1,arg1,type2,arg2,type3,arg3)
_syscall4(type,name,type1,arg1,type2,arg2,type3,arg3,type4,arg4)
_syscall5(type,name,type1,arg1,type2,arg2,type3,arg3,type4,arg4,type5,arg5)
_syscall6(type,name,type1,arg1,type2,arg2,type3,arg3,type4,arg4,type5,arg5,type6,arg6)
其中,type表示所生成系统调用的返回值类型,name表示该系统调用的名称,typeN、argN分别表示第N个参数的类型和名称,它们的数目和_syscall后面的数字一样大。
这些宏的作用是创建名为name的函数,_syscall后面跟的数字指明了该函数的参数的个数。
比如sysinfo系统调用用于获取系统总体统计信息,使用_syscall宏定义为:
_syscall1(int, sysinfo, struct sysinfo *, info);
展开后的形式为:
int sysinfo(struct sysinfo * info)
{
long __res;
__asm__ volatile("int $0x80" : "=a" (__res) : "0" (116),"b" ((long)(info)));
do {
if ((unsigned long)(__res) >= (unsigned long)(-(128 + 1)))
{
errno = -(__res);
__res = -1;
}
return (int) (__res);
} while (0);
}
可以看出,_syscall1(int, sysinfo, struct sysinfo *, info)展开成一个名为sysinfo的函数,原参数int就是函数的返回类型,原参数struct sysinfo *和info分别构成新函数的参数。
在程序文件里使用_syscall宏定义需要的系统调用,就可以在接下来的代码中通过系统调用名称直接调用该系统调用。下面是一个使用sysinfo系统调用的实例。
代码清单5.1 sysinfo系统调用使用实例
#include <stdlib.h> #include <errno.h> #include <linux/unistd.h> #include <linux/kernel.h> /* for struct sysinfo */ _syscall1(int, sysinfo, struct sysinfo *, info); int main(void) { struct sysinfo s_info; int error;
error = sysinfo(&s_info); printf("code error = %d/n", error); printf("Uptime = %lds/nLoad: 1 min %lu / 5 min %lu / 15 min %lu/n" "RAM: total %lu / free %lu / shared %lu/n" "Memory in buffers = %lu/nSwap: total %lu / free %lu/n" "Number of processes = %d/n", s_info.uptime,
s_info.loads[0], s_info.loads[1], s_info.loads[2], s_info.totalram, s_info.freeram, s_info.sharedram,
s_info.bufferram, s_info.totalswap, s_info.freeswap, s_info.procs); exit(EXIT_SUCCESS); }
但是自2.6.19版本开始,_syscall宏被废除,我们需要使用syscall函数,通过指定系统调用号和一组参数来调用系统调用。
syscall函数原型为:
int syscall(int number, ...);
其中number是系统调用号,number后面应顺序接上该系统调用的所有参数。下面是gettid系统调用的调用实例。
代码清单5.2 gettid系统调用使用实例
#include <unistd.h> #include <sys/syscall.h> #include <sys/types.h> #define __NR_gettid 224 int main(int argc, char *argv[]) { pid_t tid; tid = syscall(__NR_gettid); }
大部分系统调用都包括了一个SYS_符号常量来指定自己到系统调用号的映射,因此上面第10行可重写为:
tid = syscall(SYS_gettid);
2 系统调用与应用编程接口(API)区别
应用编程接口(API)与系统调用的不同在于,前者只是一个函数定义,说明了如何获得一个给定的服务,而后者是通过软件中断向内核发出的一个明确的请求。POSIX标准针对API,而不针对系统调用。Unix系统给程序员提供了很多API库函数。libc的标准c库所定义的一些API引用了封装例程(wrapper routine)(其唯一目的就是发布系统调用)。通常情况下,每个系统调用对应一个封装例程,而封装例程定义了应用程序使用的API。反之则不然,一个API没必要对应一个特定的系统调用。从编程者的观点看,API和系统调用之间的差别是没有关系的:唯一相关的事情就是函数名、参数类型及返回代码的含义。然而,从内核设计者的观点看,这种差别确实有关系,因为系统调用属于内核,而用户态的库函数不属于内核。
大部分封装例程返回一个整数,其值的含义依赖于相应的系统调用。返回-1通常表示内核不能满足进程的请求。系统调用处理程序的失败可能是由无效参数引起的,也可能是因为缺乏可用资源,或硬件出了问题等等。在libd库中定义的errno变量包含特定的出错码。每个出错码定义为一个常量宏。
当用户态的进程调用一个系统调用时,CPU切换到内核态并开始执行一个内核函数。因为内核实现了很多不同的系统调用,因此进程必须传递一个名为系统调用号(system call number)的参数来识别所需的系统调用。所有的系统调用都返回一个整数值。这些返回值与封装例程返回值的约定是不同的。在内核中,整数或0表示系统调用成功结束,而负数表示一个出错条件。在后一种情况下,这个值就是存放在errno变量中必须返回给应用程序的负出错码。
3 系统调用执行过程
ARM Linux系统利用SWI指令来从用户空间进入内核空间,还是先让我们了解下这个SWI指令吧。SWI指令用于产生软件中断,从而实现从用户模式变换到管理模式,CPSR保存到管理模式的SPSR,执行转移到SWI向量。在其他模式下也可使用SWI指令,处理器同样地切换到管理模式。指令格式如下:
SWI{cond} immed_24
其中:
immed_24 24位立即数,值为从0——16777215之间的整数。
使用SWI指令时,通常使用一下两种方法进行参数传递,SWI异常处理程序可以提供相关的服务,这两种方法均是用户软件协定。SWI异常中断处理程序要通过读取引起软件中断的SWI指令,以取得24为立即数。
1)、指令中24位的立即数指定了用户请求的服务类型,参数通过通用寄存器传递。如:
MOV R0,#34 SWI 12
2)、指令中的24位立即数被忽略,用户请求的服务类型有寄存器R0的只决定,参数通过其他的通用寄存器传递。如:
MOV R0, #12 MOV R1, #34 SWI 0
在SWI异常处理程序中,去除SWI立即数的步骤为:首先确定一起软中断的SWI指令时ARM指令还是Thumb指令,这可通过对SPSR访问得到;然后取得该SWI指令的地址,这可通过访问LR寄存器得到;接着读出指令,分解出立即数(低24位)。
由用户空间进入系统调用
通常情况下,我们写的代码都是通过封装的C lib来调用系统调用的。以0.9.30版uClibc中的open为例,来追踪一下这个封装的函数是如何一步一步的调用系统调用的。在include/fcntl.h中有定义:
# define open open64
open实际上只是open64的一个别名而已。
在libc/sysdeps/linux/common/open64.c中可以看到:
extern __typeof(open64) __libc_open64; extern __typeof(open) __libc_open;
可见open64也只不过是__libc_open64的别名,而__libc_open64函数在同一个文件中定义:
libc_hidden_proto(__libc_open64) int __libc_open64 (const char *file, int oflag, ...) { mode_t mode = 0; if (oflag & O_CREAT) { va_list arg; va_start (arg, oflag); mode = va_arg (arg, mode_t); va_end (arg); } return __libc_open(file, oflag | O_LARGEFILE, mode); } libc_hidden_def(__libc_open64)
最终__libc_open64又调用了__libc_open函数,这个函数在文件libc/sysdeps/linux/common/open.c中定义:
libc_hidden_proto(__libc_open) int __libc_open(const char *file, int oflag, ...) { mode_t mode = 0; if (oflag & O_CREAT) { va_list arg; va_start (arg, oflag); mode = va_arg (arg, mode_t); va_end (arg); } return __syscall_open(file, oflag, mode); }
libc_hidden_def(__libc_open)
__syscall_open在同一个文件中定义:
static __inline__ _syscall3(int, __syscall_open, const char *, file, int, flags, __kernel_mode_t, mode)
在文件libc/sysdeps/linux/arm/bits/syscalls.h文件中可以看到:
#undef _syscall3
#define _syscall3(type,name,type1,arg1,type2,arg2,type3,arg3) \
type name(type1 arg1,type2 arg2,type3 arg3) \
{ \
return (type) (INLINE_SYSCALL(name, 3, arg1, arg2, arg3)); \
}
这个宏实际上完成定义一个函数的工作,这个宏的第一个参数是函数的返回值类型,第二个参数是函数名,之后的参数就如同它的参数名所表明的那样,分别是函数的参数类型及参数名。__syscall_open实际上为:
int __syscall_open (const char * file,int flags, __kernel_mode_t mode) { return (int) (INLINE_SYSCALL(__syscall_open, 3, file, flags, mode)); }
INLINE_SYSCALL为同一个文件中定义的宏:
#undef INLINE_SYSCALL #define INLINE_SYSCALL(name, nr, args...) \ ({ unsigned int _inline_sys_result = INTERNAL_SYSCALL (name, , nr, args); \ if (__builtin_expect (INTERNAL_SYSCALL_ERROR_P (_inline_sys_result, ), 0)) \ { \ __set_errno (INTERNAL_SYSCALL_ERRNO (_inline_sys_result, )); \ _inline_sys_result = (unsigned int) -1; \ } \ (int) _inline_sys_result; }) #undef INTERNAL_SYSCALL #if !defined(__thumb__) #if defined(__ARM_EABI__) #define INTERNAL_SYSCALL(name, err, nr, args...) \ ({unsigned int __sys_result; \ { \ register int _a1 __asm__ ("r0"), _nr __asm__ ("r7"); \ LOAD_ARGS_##nr (args) \ _nr = SYS_ify(name); \ __asm__ __volatile__ ("swi 0x0 @ syscall " #name \ : "=r" (_a1) \ : "r" (_nr) ASM_ARGS_##nr \ : "memory"); \ __sys_result = _a1; \ } \ (int) __sys_result; }) #else /* defined(__ARM_EABI__) */ #define INTERNAL_SYSCALL(name, err, nr, args...) \ ({ unsigned int __sys_result; \ { \ register int _a1 __asm__ ("a1"); \ LOAD_ARGS_##nr (args) \ __asm__ __volatile__ ("swi %1 @ syscall " #name \ : "=r" (_a1) \ : "i" (SYS_ify(name)) ASM_ARGS_##nr \ : "memory"); \ __sys_result = _a1; \ } \ (int) __sys_result; }) #endif #else /* !defined(__thumb__) */ /* We can't use push/pop inside the asm because that breaks unwinding (ie. thread cancellation). */ #define INTERNAL_SYSCALL(name, err, nr, args...) \ ({ unsigned int __sys_result; \ { \ int _sys_buf[2]; \ register int _a1 __asm__ ("a1"); \ register int *_v3 __asm__ ("v3") = _sys_buf; \ *_v3 = (int) (SYS_ify(name)); \ LOAD_ARGS_##nr (args) \ __asm__ __volatile__ ("str r7, [v3, #4]\n" \ "\tldr r7, [v3]\n" \ "\tswi 0 @ syscall " #name "\n" \ "\tldr r7, [v3, #4]" \ : "=r" (_a1) \ : "r" (_v3) ASM_ARGS_##nr \ : "memory"); \ __sys_result = _a1; \ } \ (int) __sys_result; }) #endif /*!defined(__thumb__)*/
这里也将同文件中的LOAD_ARGS宏的定义贴出来:
#define LOAD_ARGS_0()
#define ASM_ARGS_0 #define LOAD_ARGS_1(a1) \ _a1 = (int) (a1); \ LOAD_ARGS_0 () #define ASM_ARGS_1 ASM_ARGS_0, "r" (_a1) #define LOAD_ARGS_2(a1, a2) \ register int _a2 __asm__ ("a2") = (int) (a2); \ LOAD_ARGS_1 (a1) #define ASM_ARGS_2 ASM_ARGS_1, "r" (_a2) #define LOAD_ARGS_3(a1, a2, a3) \ register int _a3 __asm__ ("a3") = (int) (a3); \ LOAD_ARGS_2 (a1, a2)
这项宏用来在相应的寄存器中加载相应的参数。SYS_ify宏获得系统调用号
#define SYS_ify(syscall_name) (__NR_##syscall_name)
也就是__NR___syscall_open,在libc/sysdeps/linux/common/open.c中可以看到这个宏的定义:
#define __NR___syscall_open __NR_open
__NR_open在内核代码的头文件中有定义。在r7寄存器中存放系统调用号,而参数传递似乎和普通的函数调用的参数传递也没有什么区别。
在这个地方,得注意那个EABI, EABI是什么东西呢?ABI,Application Binary Interface,应用二进制接口。在较新的EABI规范中,是将系统调用号压入寄存器r7中,而在老的OABI中则是执行的swi中断号的方式,也就是说原来的调用方式(Old ABI)是通过跟随在swi指令中的调用号来进行的。同时这两种调用方式的系统调用号也是存在这区别的,在内核的文件arch/arm/inclue/asm/unistd.h中可以看到:
#define __NR_OABI_SYSCALL_BASE 0x900000
#if defined(__thumb__) || defined(__ARM_EABI__) #define __NR_SYSCALL_BASE 0 #else #define __NR_SYSCALL_BASE __NR_OABI_SYSCALL_BASE #endif /* * This file contains the system call numbers. */ #define __NR_restart_syscall (__NR_SYSCALL_BASE+ 0) #define __NR_exit (__NR_SYSCALL_BASE+ 1) #define __NR_fork (__NR_SYSCALL_BASE+ 2) #define __NR_read (__NR_SYSCALL_BASE+ 3) #define __NR_write (__NR_SYSCALL_BASE+ 4) #define __NR_open (__NR_SYSCALL_BASE+ 5) ……
接下来来看操作系统对系统调用的处理。我们回到ARM Linux的异常向量表,因为当执行swi时,会从异常向量表中取例程的地址从而跳转到相应的处理程序中。在文件arch/arm/kernel/entry-armv.S中:
/* * We group all the following data together to optimise * for CPUs with separate I & D caches. */ .align 5 .LCvswi: .word vector_swi .globl __stubs_end __stubs_end: .equ stubs_offset, __vectors_start + 0x200 - __stubs_start .globl __vectors_start __vectors_start: ARM( swi SYS_ERROR0 ) THUMB( svc #0 ) THUMB( nop ) W(b) vector_und + stubs_offset W(ldr) pc, .LCvswi + stubs_offset W(b) vector_pabt + stubs_offset W(b) vector_dabt + stubs_offset W(b) vector_addrexcptn + stubs_offset W(b) vector_irq + stubs_offset W(b) vector_fiq + stubs_offset .globl __vectors_end __vectors_end:
而.LCvswi在同一个文件中定义为:
.LCvswi:
.word vector_swi
也就是最终会执行例程vector_swi来完成对系统调用的处理,接下来我们来看下在arch/arm/kernel/entry-common.S中定义的vector_swi例程:
/*============================================================================= * SWI handler *----------------------------------------------------------------------------- */ /* If we're optimising for StrongARM the resulting code won't run on an ARM7 and we can save a couple of instructions. --pb */ #ifdef CONFIG_CPU_ARM710 #define A710(code...) code .Larm710bug: ldmia sp, {r0 - lr}^ @ Get calling r0 - lr mov r0, r0 add sp, sp, #S_FRAME_SIZE subs pc, lr, #4 #else #define A710(code...) #endif .align 5 ENTRY(vector_swi) sub sp, sp, #S_FRAME_SIZE stmia sp, {r0 - r12} @ Calling r0 - r12 ARM( add r8, sp, #S_PC ) ARM( stmdb r8, {sp, lr}^ ) @ Calling sp, lr THUMB( mov r8, sp ) THUMB( store_user_sp_lr r8, r10, S_SP ) @ calling sp, lr mrs r8, spsr @ called from non-FIQ mode, so ok. str lr, [sp, #S_PC] @ Save calling PC str r8, [sp, #S_PSR] @ Save CPSR str r0, [sp, #S_OLD_R0] @ Save OLD_R0 zero_fp /* * Get the system call number. */ #if defined(CONFIG_OABI_COMPAT) /* * If we have CONFIG_OABI_COMPAT then we need to look at the swi * value to determine if it is an EABI or an old ABI call. */ #ifdef CONFIG_ARM_THUMB tst r8, #PSR_T_BIT movne r10, #0 @ no thumb OABI emulation ldreq r10, [lr, #-4] @ get SWI instruction #else ldr r10, [lr, #-4] @ get SWI instruction A710( and ip, r10, #0x0f000000 @ check for SWI ) A710( teq ip, #0x0f000000 ) A710( bne .Larm710bug ) #endif #ifdef CONFIG_CPU_ENDIAN_BE8 rev r10, r10 @ little endian instruction #endif #elif defined(CONFIG_AEABI) /* * Pure EABI user space always put syscall number into scno (r7). */ A710( ldr ip, [lr, #-4] @ get SWI instruction ) A710( and ip, ip, #0x0f000000 @ check for SWI ) A710( teq ip, #0x0f000000 ) A710( bne .Larm710bug ) #elif defined(CONFIG_ARM_THUMB) /* Legacy ABI only, possibly thumb mode. */ tst r8, #PSR_T_BIT @ this is SPSR from save_user_regs addne scno, r7, #__NR_SYSCALL_BASE @ put OS number in ldreq scno, [lr, #-4] #else /* Legacy ABI only. */ ldr scno, [lr, #-4] @ get SWI instruction A710( and ip, scno, #0x0f000000 @ check for SWI ) A710( teq ip, #0x0f000000 ) A710( bne .Larm710bug ) #endif #ifdef CONFIG_ALIGNMENT_TRAP ldr ip, __cr_alignment ldr ip, [ip] mcr p15, 0, ip, c1, c0 @ update control register #endif enable_irq
//tsk 是寄存器r9的别名,在arch/arm/kernel/entry-header.S中定义:// tsk .req r9 @current thread_info
// 获得线程对象的基地址。
get_thread_info tsk
// tbl是r8寄存器的别名,在arch/arm/kernel/entry-header.S中定义:
// tbl .req r8 @syscall table pointer,
// 用来存放系统调用表的指针,系统调用表在后面调用
adr tbl, sys_call_table @ load syscall table pointer #if defined(CONFIG_OABI_COMPAT) /* * If the swi argument is zero, this is an EABI call and we do nothing. * * If this is an old ABI call, get the syscall number into scno and * get the old ABI syscall table address. */ bics r10, r10, #0xff000000 eorne scno, r10, #__NR_OABI_SYSCALL_BASE ldrne tbl, =sys_oabi_call_table #elif !defined(CONFIG_AEABI)
// scno是寄存器r7的别名
bic scno, scno, #0xff000000 @ mask off SWI op-code eor scno, scno, #__NR_SYSCALL_BASE @ check OS number #endif ldr r10, [tsk, #TI_FLAGS] @ check for syscall tracing stmdb sp!, {r4, r5} @ push fifth and sixth args #ifdef CONFIG_SECCOMP tst r10, #_TIF_SECCOMP beq 1f mov r0, scno bl __secure_computing add r0, sp, #S_R0 + S_OFF @ pointer to regs ldmia r0, {r0 - r3} @ have to reload r0 - r3 1: #endif tst r10, #_TIF_SYSCALL_TRACE @ are we tracing syscalls? bne __sys_trace cmp scno, #NR_syscalls @ check upper syscall limit adr lr, BSYM(ret_fast_syscall) @ return address ldrcc pc, [tbl, scno, lsl #2] @ call sys_* routine add r1, sp, #S_OFF
// why也是r8寄存器的别名
2: mov why, #0 @ no longer a real syscall
cmp scno, #(__ARM_NR_BASE - __NR_SYSCALL_BASE) eor r0, scno, #__NR_SYSCALL_BASE @ put OS number back bcs arm_syscall b sys_ni_syscall @ not private func ENDPROC(vector_swi) /* * This is the really slow path. We're going to be doing * context switches, and waiting for our parent to respond. */ __sys_trace: mov r2, scno add r1, sp, #S_OFF mov r0, #0 @ trace entry [IP = 0] bl syscall_trace adr lr, BSYM(__sys_trace_return) @ return address mov scno, r0 @ syscall number (possibly new) add r1, sp, #S_R0 + S_OFF @ pointer to regs cmp scno, #NR_syscalls @ check upper syscall limit ldmccia r1, {r0 - r3} @ have to reload r0 - r3 ldrcc pc, [tbl, scno, lsl #2] @ call sys_* routine b 2b __sys_trace_return: str r0, [sp, #S_R0 + S_OFF]! @ save returned r0 mov r2, scno mov r1, sp mov r0, #1 @ trace exit [IP = 1] bl syscall_trace b ret_slow_syscall .align 5 #ifdef CONFIG_ALIGNMENT_TRAP .type __cr_alignment, #object __cr_alignment: .word cr_alignment #endif .ltorg /* * This is the syscall table declaration for native ABI syscalls. * With EABI a couple syscalls are obsolete and defined as sys_ni_syscall. */ #define ABI(native, compat) native #ifdef CONFIG_AEABI #define OBSOLETE(syscall) sys_ni_syscall #else #define OBSOLETE(syscall) syscall #endif .type sys_call_table, #object ENTRY(sys_call_table) #include "calls.S" #undef ABI #undef OBSOLETE
上面的zero_fp是一个宏,在arch/arm/kernel/entry-header.S中定义:
.macro zero_fp #ifdef CONFIG_FRAME_POINTER mov fp, #0 #endif .endm //而fp位寄存器r11。
像每一个异常处理程序一样,要做的第一件事当然就是保护现场了。紧接着是获得系统调用的系统调用号。
然后以系统调用号作为索引来查找系统调用表,如果系统调用号正常的话,就会调用相应的处理例程来处理,就是上面的那个ldrcc pc, [tbl, scno, lsl #2]语句,然后通过例程ret_fast_syscall来返回。
在这个地方我们接着来讨论ABI的问题。现在,我们首先来看两个宏,一个是CONFIG_OABI_COMPAT 意思是说与old ABI兼容,另一个是CONFIG_AEABI 意思是说指定现在的方式为EABI。这两个宏可以同时配置,也可以都不配,也可以配置任何一种。我们来看一下内核是怎么处理这一问题的。我们知道,sys_call_table 在内核中是个跳转表,这个表中存储的是一系列的函数指针,这些指针就是系统调用函数的指针,如(sys_open)。系统调用是根据一个系统调用号(通常就是表的索引)找到实际该调用内核哪个函数,然后通过运行该函数完成的。
首先,对于old ABI,内核给出的处理是为它建立一个单独的system call table,叫sys_oabi_call_table,这样,兼容方式下就会有两个system call table, 以old ABI方式的系统调用会执行old_syscall_table表中的系统调用函数,EABI方式的系统调用会用sys_call_table中的函数指针。
配置无外乎以下4中:
第一、两个宏都配置行为就是上面说的那样。
第二、只配置CONFIG_OABI_COMPAT,那么以old ABI方式调用的会用sys_oabi_call_table,以EABI方式调用的用sys_call_table,和1实质上是相同的。只是情况1更加明确。
第三、只配置CONFIG_AEABI系统中不存在sys_oabi_call_table,对old ABI方式调用不兼容。只能 以EABI方式调用,用sys_call_table。
第四、两个都没有配置,系统默认会只允许old ABI方式,但是不存在old_syscall_table,最终会通过sys_call_table 完成函数调用
系统会根据ABI的不同而将相应的系统调用表的基地址加载进tbl寄存器,也就是r8寄存器。接下来来看系统调用表,如前面所说的那样,有两个,同样都在文件arch/arm/kernel/entry-common.S中:
/* * This is the syscall table declaration for native ABI syscalls. * With EABI a couple syscalls are obsolete and defined as sys_ni_syscall. */ #define ABI(native, compat) native #ifdef CONFIG_AEABI #define OBSOLETE(syscall) sys_ni_syscall #else #define OBSOLETE(syscall) syscall #endif .type sys_call_table, #object ENTRY(sys_call_table) #include "calls.S" #undef ABI #undef OBSOLETE
另外一个为:
/* * This is the syscall table declaration for native ABI syscalls. * With EABI a couple syscalls are obsolete and defined as sys_ni_syscall. */ #define ABI(native, compat) native #ifdef CONFIG_AEABI #define OBSOLETE(syscall) sys_ni_syscall #else #define OBSOLETE(syscall) syscall #endif .type sys_call_table, #object ENTRY(sys_call_table) #include "calls.S" #undef ABI #undef OBSOLETE
这样看来貌似两个系统调用表是完全一样的。这里预处理指令include的独特用法也挺有意思,在系统调用表的内容就是整个arch/arm/kernel/calls.S文件的内容这个文件的内容如下(由于太长,这里就不全部列出了):
/* * linux/arch/arm/kernel/calls.S * * Copyright (C) 1995-2005 Russell King * * This program is free software; you can redistribute it and/or modify * it under the terms of the GNU General Public License version 2 as * published by the Free Software Foundation. * * This file is included thrice in entry-common.S */ /* 0 */ CALL(sys_restart_syscall) CALL(sys_exit) CALL(sys_fork_wrapper) CALL(sys_read) CALL(sys_write) /* 5 */ CALL(sys_open) CALL(sys_close) CALL(sys_ni_syscall) /* was sys_waitpid */ CALL(sys_creat) CALL(sys_link) ...
这个是同样在文件arch/arm/kernel/entry-common.S中的宏CALL()的定义:
.equ NR_syscalls,0 #define CALL(x) .equ NR_syscalls,NR_syscalls+1 #include "calls.S" #undef CALL #define CALL(x) .long x
最后再罗嗦一点,如果用sys_open来搜的话,是搜不到系统调用open的定义的,系统调用函数都是用宏来定义的,比如对于open,在文件fs/open.c文件中这样定义:
SYSCALL_DEFINE3(open, const char __user *, filename, int, flags, int, mode) { long ret; if (force_o_largefile()) flags |= O_LARGEFILE; ret = do_sys_open(AT_FDCWD, filename, flags, mode); /* avoid REGPARM breakage on x86: */ asmlinkage_protect(3, ret, filename, flags, mode); return ret; }
继续回到vector_swi,而如果系统调用号不正确,则会调用arm_syscall函数来进行处理,这个函数在文件arch/arm/kernel/traps.c中定义:
/* * Handle all unrecognised system calls. * 0x9f0000 - 0x9fffff are some more esoteric system calls */ #define NR(x) ((__ARM_NR_##x) - __ARM_NR_BASE) asmlinkage int arm_syscall(int no, struct pt_regs *regs) { struct thread_info *thread = current_thread_info(); siginfo_t info; if ((no >> 16) != (__ARM_NR_BASE>> 16)) return bad_syscall(no, regs); switch (no & 0xffff) { case 0: /* branch through 0 */ info.si_signo = SIGSEGV; info.si_errno = 0; info.si_code = SEGV_MAPERR; info.si_addr = NULL; arm_notify_die("branch through zero", regs, &info, 0, 0); return 0; case NR(breakpoint): /* SWI BREAK_POINT */ regs->ARM_pc -= thumb_mode(regs) ? 2 : 4; ptrace_break(current, regs); return regs->ARM_r0; /* * Flush a region from virtual address 'r0' to virtual address 'r1' * _exclusive_. There is no alignment requirement on either address; * user space does not need to know the hardware cache layout. * * r2 contains flags. It should ALWAYS be passed as ZERO until it * is defined to be something else. For now we ignore it, but may * the fires of hell burn in your belly if you break this rule. ;) * * (at a later date, we may want to allow this call to not flush * various aspects of the cache. Passing '0' will guarantee that * everything necessary gets flushed to maintain consistency in * the specified region). */ case NR(cacheflush): do_cache_op(regs->ARM_r0, regs->ARM_r1, regs->ARM_r2); return 0; case NR(usr26): if (!(elf_hwcap & HWCAP_26BIT)) break; regs->ARM_cpsr &= ~MODE32_BIT; return regs->ARM_r0; case NR(usr32): if (!(elf_hwcap & HWCAP_26BIT)) break; regs->ARM_cpsr |= MODE32_BIT; return regs->ARM_r0; case NR(set_tls): thread->tp_value = regs->ARM_r0; if (tls_emu) return 0; if (has_tls_reg) { asm ("mcr p15, 0, %0, c13, c0, 3" : : "r" (regs->ARM_r0)); } else { /* * User space must never try to access this directly. * Expect your app to break eventually if you do so. * The user helper at 0xffff0fe0 must be used instead. * (see entry-armv.S for details) */ *((unsigned int *)0xffff0ff0) = regs->ARM_r0; } return 0; #ifdef CONFIG_NEEDS_SYSCALL_FOR_CMPXCHG /* * Atomically store r1 in *r2 if *r2 is equal to r0 for user space. * Return zero in r0 if *MEM was changed or non-zero if no exchange * happened. Also set the user C flag accordingly. * If access permissions have to be fixed up then non-zero is * returned and the operation has to be re-attempted. * * *NOTE*: This is a ghost syscall private to the kernel. Only the * __kuser_cmpxchg code in entry-armv.S should be aware of its * existence. Don't ever use this from user code. */ case NR(cmpxchg): for (;;) { extern void do_DataAbort(unsigned long addr, unsigned int fsr, struct pt_regs *regs); unsigned long val; unsigned long addr = regs->ARM_r2; struct mm_struct *mm = current->mm; pgd_t *pgd; pmd_t *pmd; pte_t *pte; spinlock_t *ptl; regs->ARM_cpsr &= ~PSR_C_BIT; down_read(&mm->mmap_sem); pgd = pgd_offset(mm, addr); if (!pgd_present(*pgd)) goto bad_access; pmd = pmd_offset(pgd, addr); if (!pmd_present(*pmd)) goto bad_access; pte = pte_offset_map_lock(mm, pmd, addr, &ptl); if (!pte_present(*pte) || !pte_dirty(*pte)) { pte_unmap_unlock(pte, ptl); goto bad_access; } val = *(unsigned long *)addr; val -= regs->ARM_r0; if (val == 0) { *(unsigned long *)addr = regs->ARM_r1; regs->ARM_cpsr |= PSR_C_BIT; } pte_unmap_unlock(pte, ptl); up_read(&mm->mmap_sem); return val; bad_access: up_read(&mm->mmap_sem); /* simulate a write access fault */ do_DataAbort(addr, 15 + (1 << 11), regs); } #endif default: /* Calls 9f00xx..9f07ff are defined to return -ENOSYS if not implemented, rather than raising SIGILL. This way the calling program can gracefully determine whether a feature is supported. */ if ((no & 0xffff) <= 0x7ff) return -ENOSYS; break; } #ifdef CONFIG_DEBUG_USER /* * experience shows that these seem to indicate that * something catastrophic has happened */ if (user_debug & UDBG_SYSCALL) { printk("[%d] %s: arm syscall %d\n", task_pid_nr(current), current->comm, no); dump_instr("", regs); if (user_mode(regs)) { __show_regs(regs); c_backtrace(regs->ARM_fp, processor_mode(regs)); } } #endif info.si_signo = SIGILL; info.si_errno = 0; info.si_code = ILL_ILLTRP; info.si_addr = (void __user *)instruction_pointer(regs) - (thumb_mode(regs) ? 2 : 4); arm_notify_die("Oops - bad syscall(2)", regs, &info, no, 0); return 0; }
还有那个sys_ni_syscall,这个函数在kernel/sys_ni.c中定义,它的作用似乎也仅仅是要给用户空间返回错误码ENOSYS。
/* we can't #include <linux/syscalls.h> here, but tell gcc to not warn with -Wmissing-prototypes */ asmlinkage long sys_ni_syscall(void); /* * Non-implemented system calls get redirected here. */ asmlinkage long sys_ni_syscall(void) { return -ENOSYS; }
系统调用号正确也好不正确也好,最终都是通过ret_fast_syscall例程来返回,同样在arch/arm/kernel/entry-common.S文件中:
.align 5 /* * This is the fast syscall return path. We do as little as * possible here, and this includes saving r0 back into the SVC * stack. */ ret_fast_syscall: UNWIND(.fnstart ) UNWIND(.cantunwind ) disable_irq @ disable interrupts ldr r1, [tsk, #TI_FLAGS] tst r1, #_TIF_WORK_MASK bne fast_work_pending #if defined(CONFIG_IRQSOFF_TRACER) asm_trace_hardirqs_on #endif /* perform architecture specific actions before user return */ arch_ret_to_user r1, lr restore_user_regs fast = 1, offset = S_OFF UNWIND(.fnend )
四.声明系统调用的相关宏
linux下的系统调用函数定义接口:
1.SYSCALL_DEFINE1~6(include/linux/syscalls.h )
#define SYSCALL_DEFINE1(name, ...) SYSCALL_DEFINEx(1, _##name, __VA_ARGS__) #define SYSCALL_DEFINE2(name, ...) SYSCALL_DEFINEx(2, _##name, __VA_ARGS__) #define SYSCALL_DEFINE3(name, ...) SYSCALL_DEFINEx(3, _##name, __VA_ARGS__) #define SYSCALL_DEFINE4(name, ...) SYSCALL_DEFINEx(4, _##name, __VA_ARGS__) #define SYSCALL_DEFINE5(name, ...) SYSCALL_DEFINEx(5, _##name, __VA_ARGS__) #define SYSCALL_DEFINE6(name, ...) SYSCALL_DEFINEx(6, _##name, __VA_ARGS__)
2.SYSCALL_DEFINEx
#ifdef CONFIG_FTRACE_SYSCALLS #define SYSCALL_DEFINEx(x, sname, ...) \ static const char *types_##sname[] = { \ __SC_STR_TDECL##x(__VA_ARGS__) \ }; \ static const char *args_##sname[] = { \ __SC_STR_ADECL##x(__VA_ARGS__) \ }; \ SYSCALL_METADATA(sname, x); \ __SYSCALL_DEFINEx(x, sname, __VA_ARGS__) #else #define SYSCALL_DEFINEx(x, sname, ...) \ __SYSCALL_DEFINEx(x, sname, __VA_ARGS__) #endif
3.__SYSCALL_DEFINEx
#ifdef CONFIG_HAVE_SYSCALL_WRAPPERS #define SYSCALL_DEFINE(name) static inline long SYSC_##name #define __SYSCALL_DEFINEx(x, name, ...) \ asmlinkage long sys##name(__SC_DECL##x(__VA_ARGS__)); \ static inline long SYSC##name(__SC_DECL##x(__VA_ARGS__)); \ asmlinkage long SyS##name(__SC_LONG##x(__VA_ARGS__)) \ { \ __SC_TEST##x(__VA_ARGS__); \ return (long) SYSC##name(__SC_CAST##x(__VA_ARGS__)); \ } \ SYSCALL_ALIAS(sys##name, SyS##name); \ static inline long SYSC##name(__SC_DECL##x(__VA_ARGS__)) #else /* CONFIG_HAVE_SYSCALL_WRAPPERS */ #define SYSCALL_DEFINE(name) asmlinkage long sys_##name #define __SYSCALL_DEFINEx(x, name, ...) \ asmlinkage long sys##name(__SC_DECL##x(__VA_ARGS__)) #endif /* CONFIG_HAVE_SYSCALL_WRAPPERS */
4.__SC_开头的宏
#define __SC_DECL1(t1, a1) t1 a1 #define __SC_DECL2(t2, a2, ...) t2 a2, __SC_DECL1(__VA_ARGS__) #define __SC_DECL3(t3, a3, ...) t3 a3, __SC_DECL2(__VA_ARGS__) #define __SC_DECL4(t4, a4, ...) t4 a4, __SC_DECL3(__VA_ARGS__) #define __SC_DECL5(t5, a5, ...) t5 a5, __SC_DECL4(__VA_ARGS__) #define __SC_DECL6(t6, a6, ...) t6 a6, __SC_DECL5(__VA_ARGS__) #define __SC_LONG1(t1, a1) long a1 #define __SC_LONG2(t2, a2, ...) long a2, __SC_LONG1(__VA_ARGS__) #define __SC_LONG3(t3, a3, ...) long a3, __SC_LONG2(__VA_ARGS__) #define __SC_LONG4(t4, a4, ...) long a4, __SC_LONG3(__VA_ARGS__) #define __SC_LONG5(t5, a5, ...) long a5, __SC_LONG4(__VA_ARGS__) #define __SC_LONG6(t6, a6, ...) long a6, __SC_LONG5(__VA_ARGS__) #define __SC_CAST1(t1, a1) (t1) a1 #define __SC_CAST2(t2, a2, ...) (t2) a2, __SC_CAST1(__VA_ARGS__) #define __SC_CAST3(t3, a3, ...) (t3) a3, __SC_CAST2(__VA_ARGS__) #define __SC_CAST4(t4, a4, ...) (t4) a4, __SC_CAST3(__VA_ARGS__) #define __SC_CAST5(t5, a5, ...) (t5) a5, __SC_CAST4(__VA_ARGS__) #define __SC_CAST6(t6, a6, ...) (t6) a6, __SC_CAST5(__VA_ARGS__)
...
5.针对SYSCALL_DEFINE1(close, unsigned int, fd)来分析一下
SYSCALL_DEFINE1(close, unsigned int, fd)根据#define SYSCALL_DEFINE1(name, ...) SYSCALL_DEFINEx(1, _##name, __VA_ARGS__)
化简SYSCALL_DEFINEx(1, _close, __VA_ARGS__) 【 ##是连接符的意思】,根据SYSCALL_DEFINEx的定义
化简__SYSCALL_DEFINEx(1, _close, __VA_ARGS__) 根据__SYSCALL_DEFINEx的定义
#define __SYSCALL_DEFINEx(1, _close, ...) \ asmlinkage long sys_close(__SC_DECL1(__VA_ARGS__)); \ static inline long SYSC_close(__SC_DECL1(__VA_ARGS__)); \ asmlinkage long SyS_close(__SC_LONG1(__VA_ARGS__)) \ { \ __SC_TEST1(__VA_ARGS__); \ return (long) SYSC_close(__SC_CAST1(__VA_ARGS__)); \ } \ SYSCALL_ALIAS(sys_close, SyS_close); \ static inline long SYSC_close(__SC_DECL1(__VA_ARGS__))
这里__VA_ARGS__是可变参数宏,可以认为等于unsigned int, fd
根据__SC_宏化简
#define __SYSCALL_DEFINEx(1, _close, ...) \ asmlinkage long sys_close(unsigned int fd); \ static inline long SYSC_close(unsigned int fd); \ asmlinkage long SyS_close(long fd)) \ { \ BUILD_BUG_ON(sizeof(unsigned int) > sizeof(long)) \ return (long) SYSC_close((unsigned int)fd); \ } \ SYSCALL_ALIAS(sys_close, SyS_close); \ static inline long SYSC_close(unsigned int fd)
声明了sys_close函数
定义了SyS_close函数,函数体调用SYSC_close函数,并返回其返回值
SYSCALL_ALIAS宏
#define SYSCALL_ALIAS(alias, name) \ asm ("\t.globl " #alias "\n\t.set " #alias ", " #name)
插入汇编代码 让执行sys_close等同于执行SYS_close
#define SYSCALL_ALIAS(alias, name) \ asm ("\t.globl " #alias "\n\t.set " #alias ", " #name)
【#是预处理的意思】
BUILD_BUG_ON宏是个错误判断检测的功能
最后一句是SYSC_close的函数定义
所以在SYSCALL_DEFINE1宏定义后面紧跟的是{}包围起来的函数体
6.根据5的解析可推断出
SYSCALL_DEFINE1的'1'代表的是sys_close的参数个数为1
同理SYSCALL_DEFINE?的'/'代表的是sys_name的参数为'?'个
7.系统调用函数的定义用SYSCALL_DEFINE宏修饰
系统调用函数的外部声明在include/linux/Syscalls.h头文件中
5 添加新的系统调用
第一、打开arch/arm/kernel/calls.S,在最后添加系统调用的函数原型的指针,例如:
CALL(sys_set_senda)
补充说明一点关于NR_syscalls的东西,这个常量表示系统调用的总的个数,在较新版本的内核中,文件arch/arm/kernel/entry-common.S中可以找到:
.equ NR_syscalls,0 #define CALL(x) .equ NR_syscalls,NR_syscalls+1 #include "calls.S" #undef CALL #define CALL(x) .long x
相当的巧妙,不是吗?在系统调用表中每添加一个系统调用,NR_syscalls就自动增加一。在这个地方先求出NR_syscalls,然后重新定义CALL(x)宏,这样也可以不影响文件后面系统调用表的建立。
第二、打开include/asm-arm/unistd.h,添加系统调用号的宏,感觉这步可以省略,因为这个地方定义的系统调用号主要是个C库,比如uClibc、Glibc用的。例如:
#define __NR_plan_set_senda (__NR_SYSCALL_BASE+365)
为了向后兼容,系统调用只能增加而不能减少,这里的编号添加时,也必须按顺序来。否则会导致核心运行错误。
第三,实例化该系统调用,即编写新添加系统调用的实现例如:
SYSCALL_DEFINE1(set_senda, int,iset) { if(iset) UART_PUT_CR(&at91_port[2],AT91C_US_SENDA); else UART_PUT_CR(&at91_port[2],AT91C_US_RSTSTA); return 0; }
第四、打开include/linux/syscalls.h添加函数声明
asmlinkage long sys_set_senda(int iset);
第五、在应用程序中调用该系统调用,可以参考uClibc的实现。
第六、结束。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号