爱普生机械手点位示教说明书
第1步:打开软件
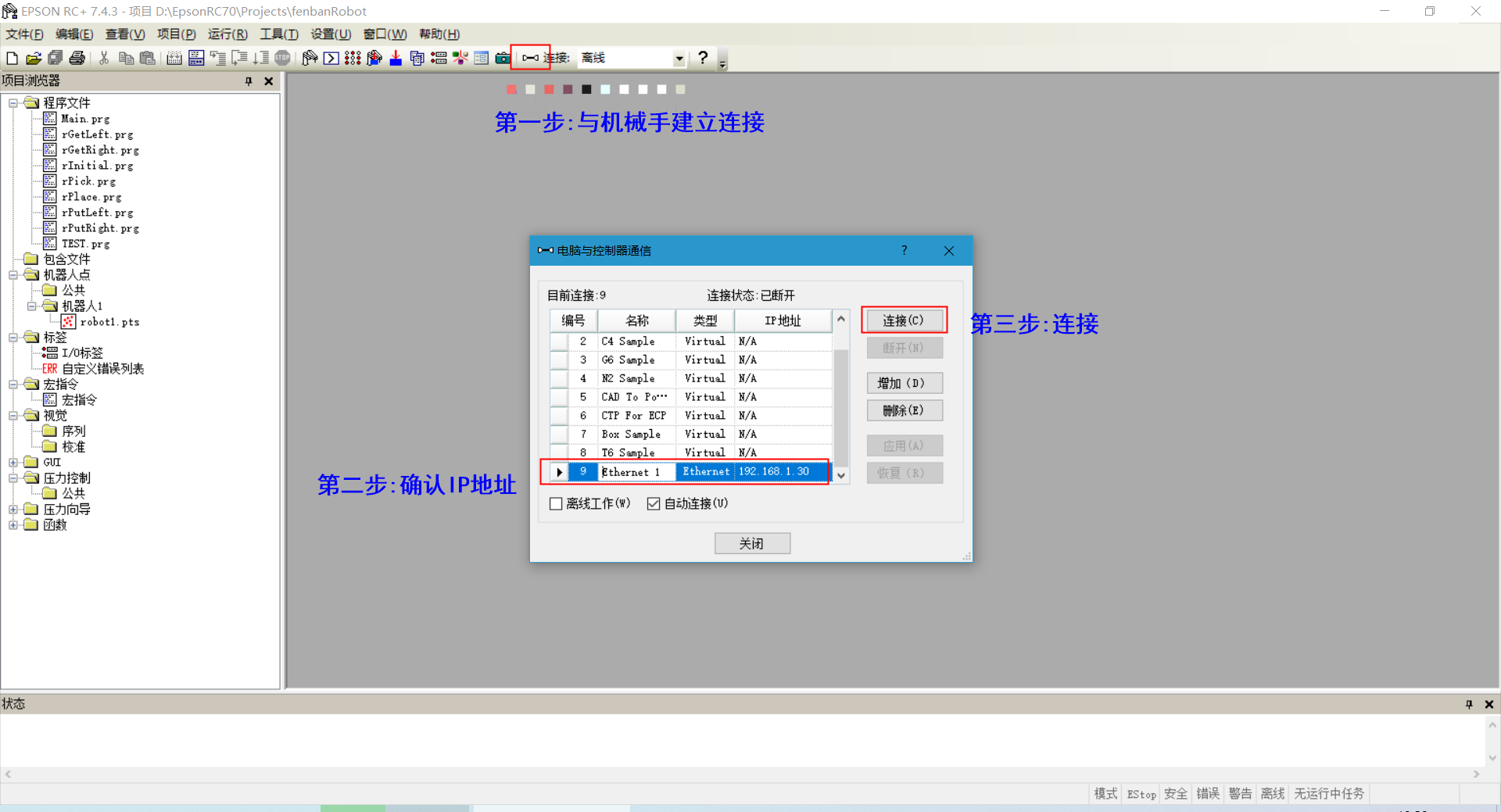
第2步:连接机械手
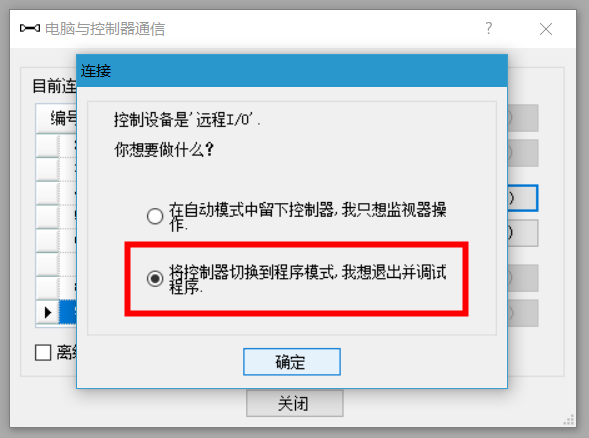
第3步:切换机械手至调试模式 (此时如果显示机器人在执行任务中,可进入HMI手动界面点一下"RB停止", 然后重新连接机器人)
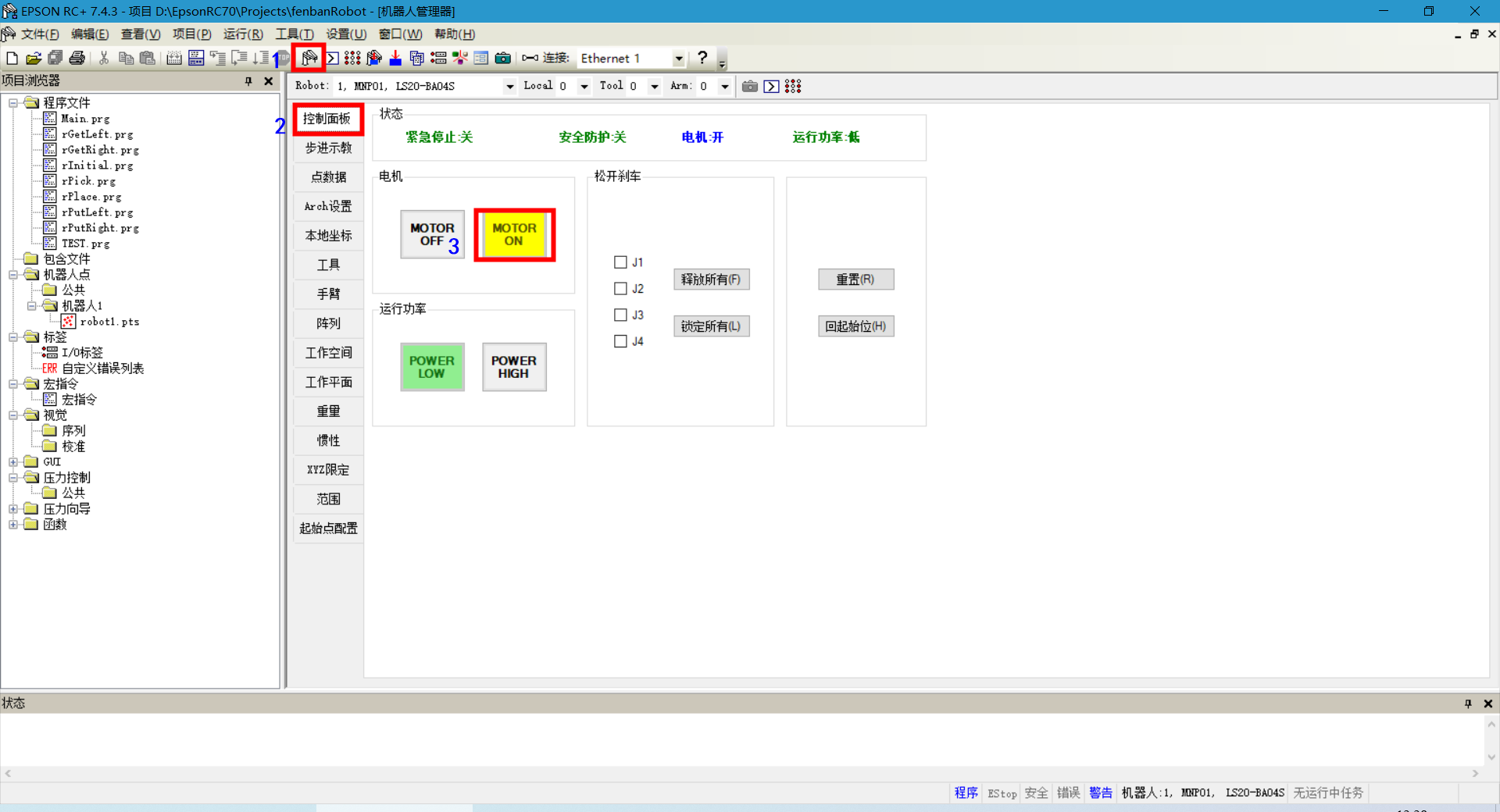
第4步:给机械手上使能
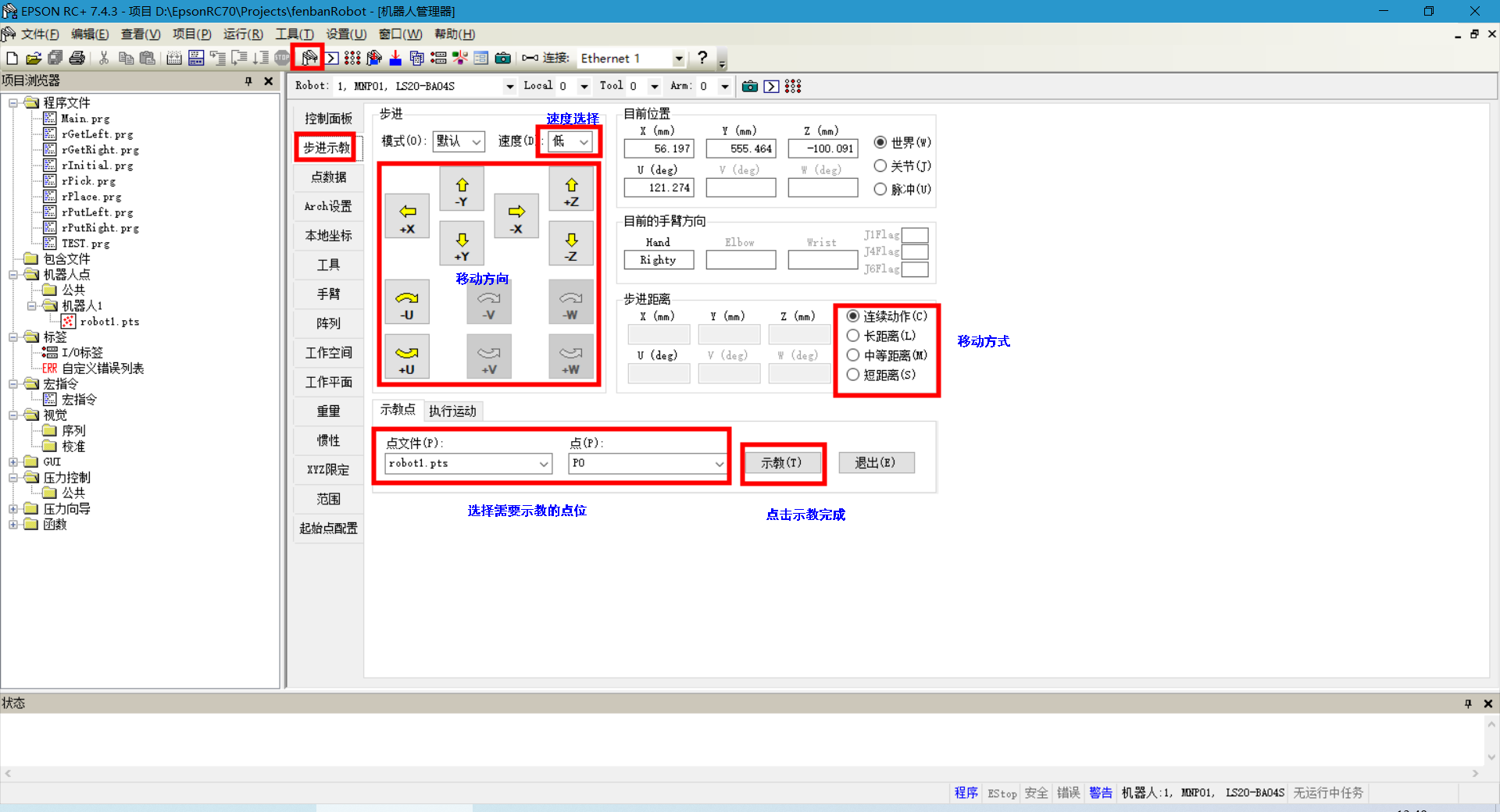
第5步:手动移动机器人,示教点位
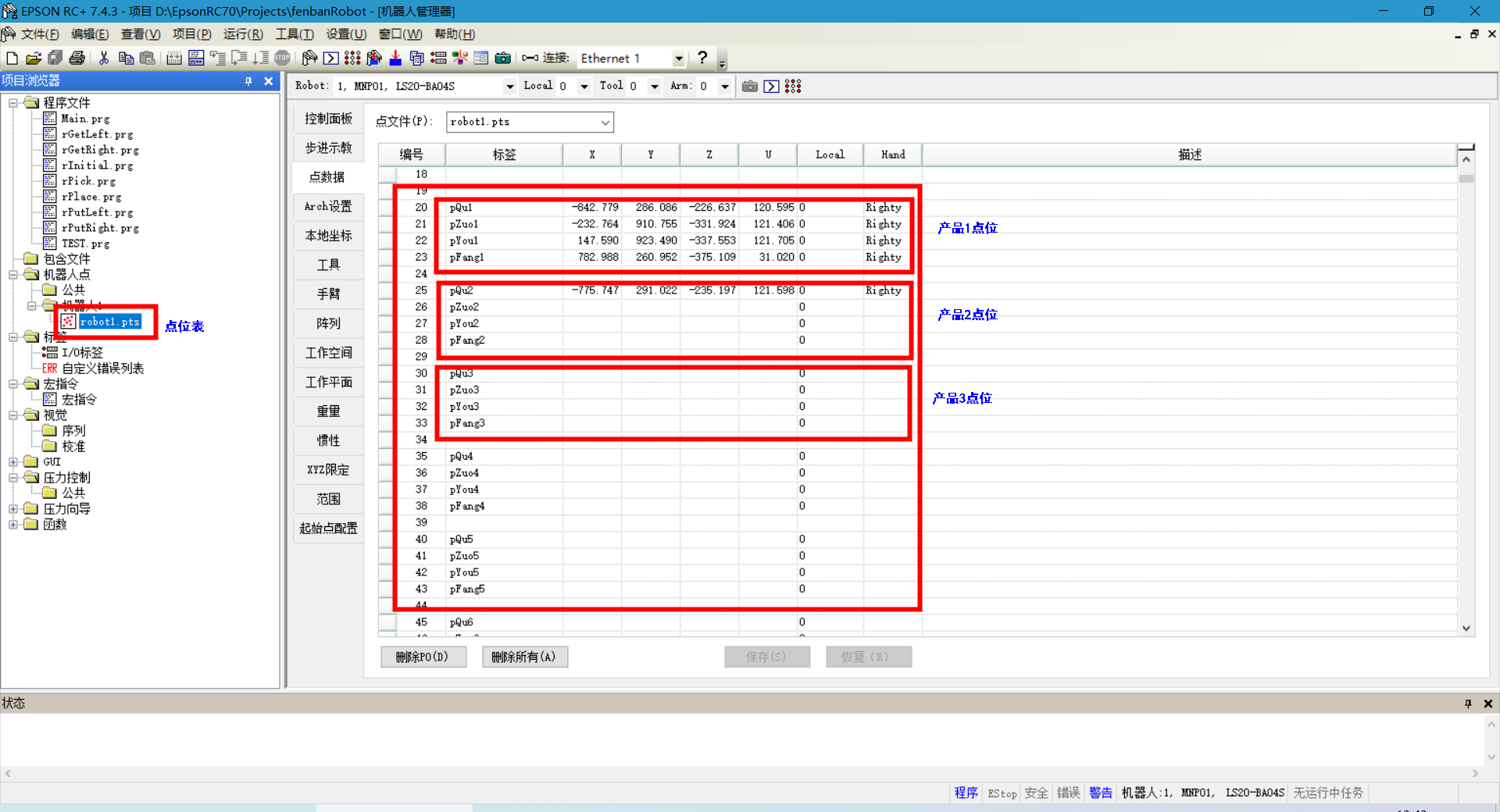
第6步:点位表解析 (只是用于点位理解使用)
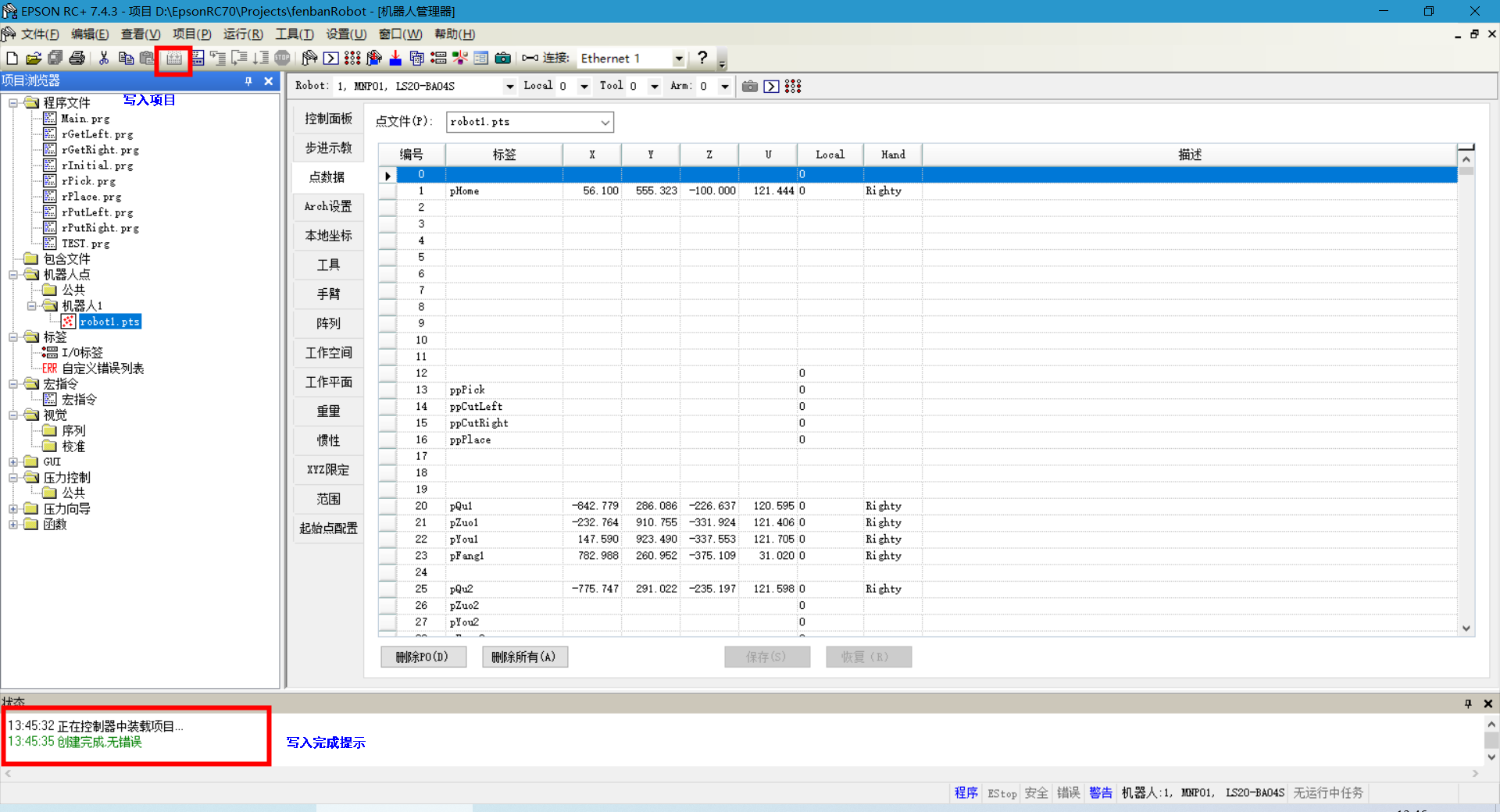
第7步: 写入程序
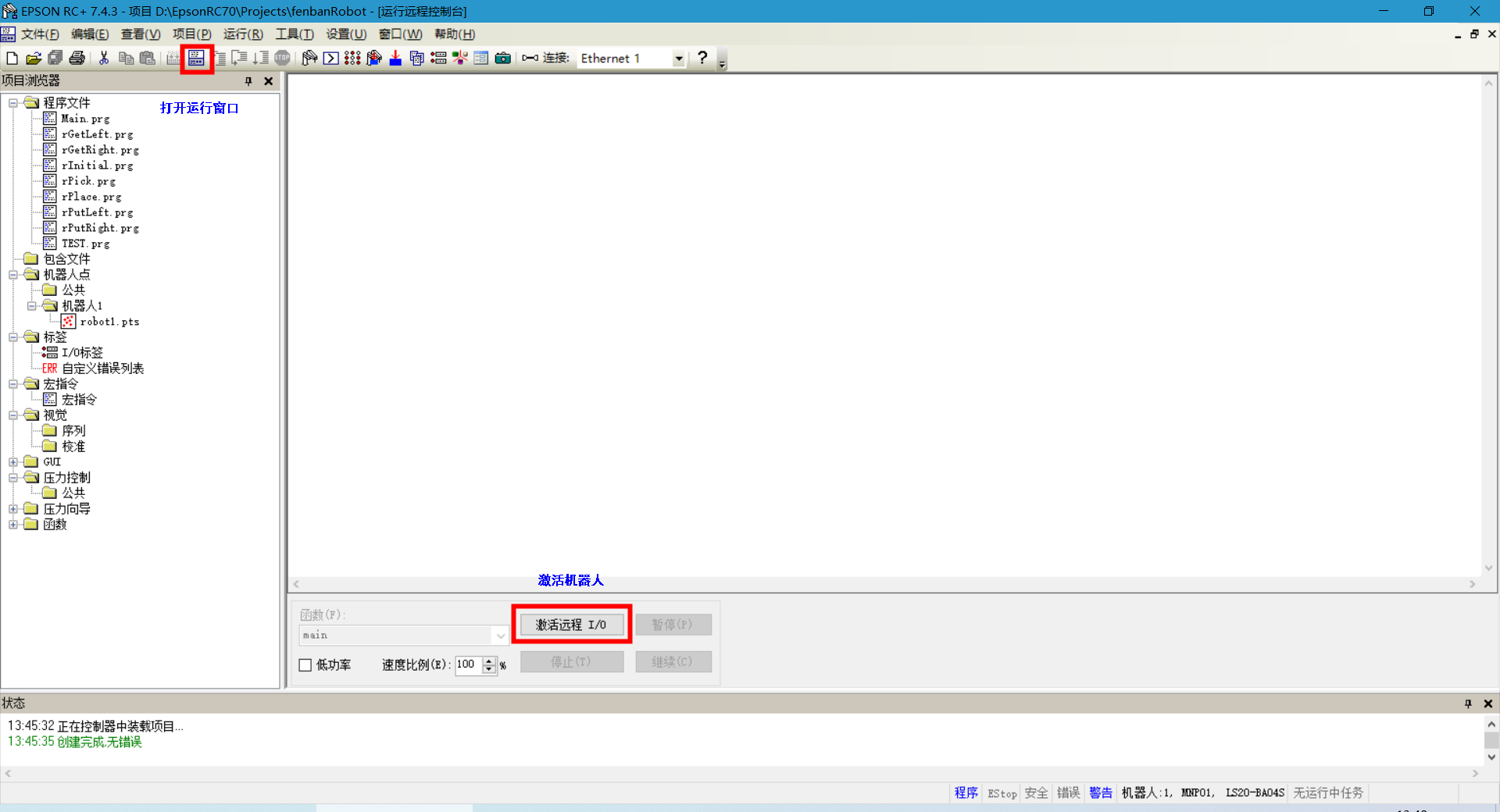
第8步: 激活机器人
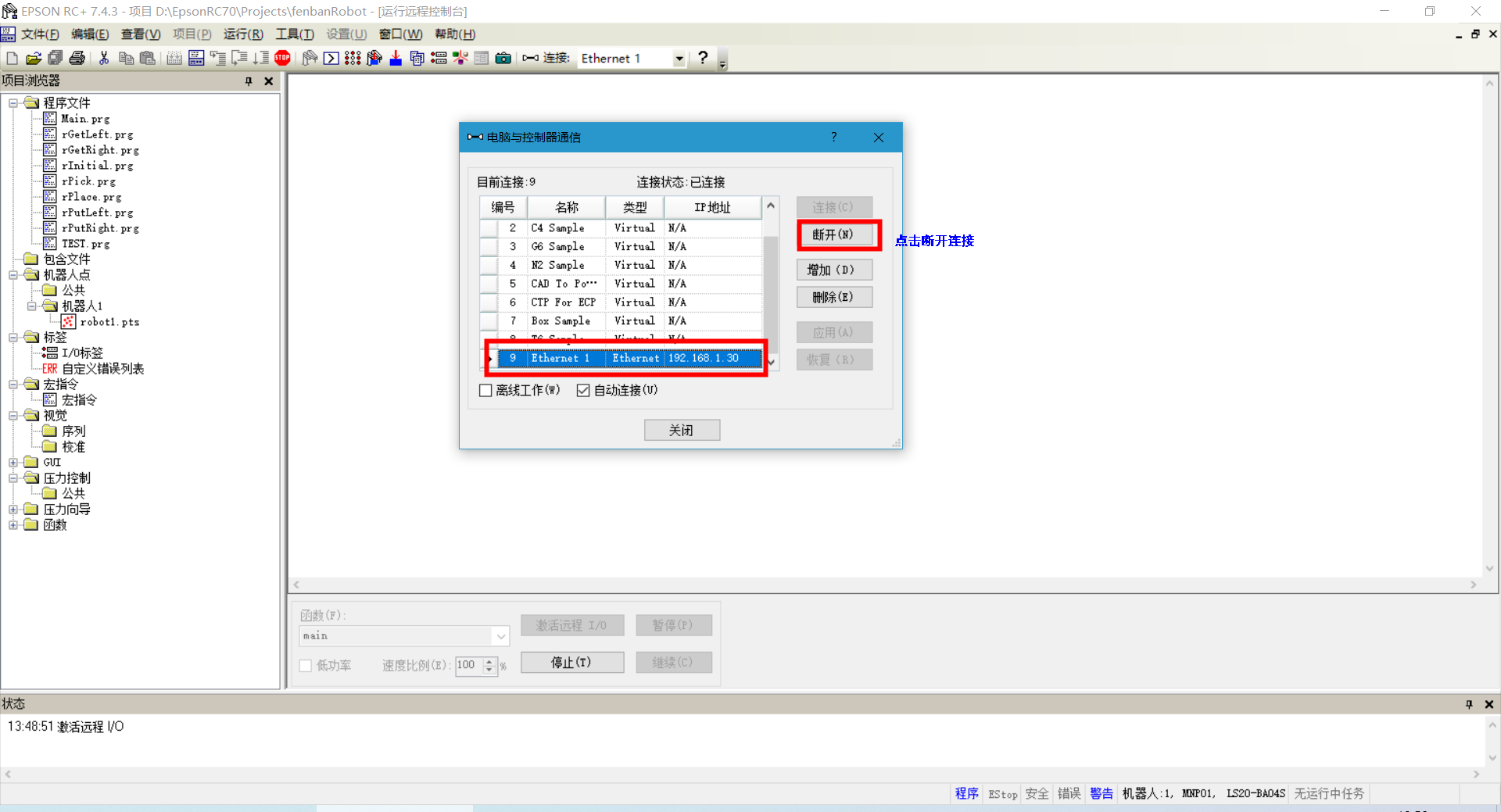
第9步:断开机器人连接 ( 否则将无法关闭软件 )
第10步: 关闭软件即可;
第1步:打开软件
第2步:连接机械手
第3步:切换机械手至调试模式 (此时如果显示机器人在执行任务中,可进入HMI手动界面点一下"RB停止", 然后重新连接机器人)
第4步:给机械手上使能
第5步:手动移动机器人,示教点位
第6步:点位表解析 (只是用于点位理解使用)
第7步: 写入程序
第8步: 激活机器人
第9步:断开机器人连接 ( 否则将无法关闭软件 )
第10步: 关闭软件即可;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号